 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpiking Personalized Federated Learning for Brain-Computer Interface-Enabled Immersive Communication
Mar 24, 2026This work proposes a novel immersive communication framework that leverages brain-computer interface (BCI) to acquire brain signals for inferring user-centric states (e.g., intention and perception-related discomfort), thereby enabling more personalized and robust immersive adaptation under strong individual variability. Specifically, we develop a personalized federated learning (PFL) model to analyze and process the collected brain signals, which not only accommodates neurodiverse brain-signal data but also prevents the leakage of sensitive brain-signal information. To address the energy bottleneck of continual on-device learning and inference on energy-limited immersive terminals (e.g., head-mounted display), we further embed spiking neural networks (SNNs) into the PFL. By exploiting sparse, event-driven spike computation, the SNN-enabled PFL reduces the computation and energy cost of training and inference while maintaining competitive personalization performance. Experiments on real brain-signal dataset demonstrate that our method achieves the best overall identification accuracy while reducing inference energy by 6.46$\times$ compared with conventional artificial neural network-based personalized baselines.
Deep Learning-Driven Friendly Jamming for Secure Multicarrier ISAC Under Channel Uncertainty
Mar 05, 2026Integrated sensing and communication (ISAC) systems promise efficient spectrum utilization by jointly supporting radar sensing and wireless communication. This paper presents a deep learning-driven framework for enhancing physical-layer security in multicarrier ISAC systems under imperfect channel state information (CSI) and in the presence of unknown eavesdropper (Eve) locations. Unlike conventional ISAC-based friendly jamming (FJ) approaches that require Eve's CSI or precise angle-of-arrival (AoA) estimates, our method exploits radar echo feedback to guide directional jamming without explicit Eve's information. To enhance robustness to radar sensing uncertainty, we propose a radar-aware neural network that jointly optimizes beamforming and jamming by integrating a novel nonparametric Fisher Information Matrix (FIM) estimator based on f-divergence. The jamming design satisfies the Cramer-Rao lower bound (CRLB) constraints even in the presence of noisy AoA. For efficient implementation, we introduce a quantized tensor train-based encoder that reduces the model size by more than 100 times with negligible performance loss. We also integrate a non-overlapping secure scheme into the proposed framework, in which specific sub-bands can be dedicated solely to communication. Extensive simulations demonstrate that the proposed solution achieves significant improvements in secrecy rate, reduced block error rate (BLER), and strong robustness against CSI uncertainty and angular estimation errors, underscoring the effectiveness of the proposed deep learning-driven friendly jamming framework under practical ISAC impairments.
Energy-Efficient Learning-Based Beamforming for ISAC-Enabled V2X Networks
Aug 27, 2025This work proposes an energy-efficient, learning-based beamforming scheme for integrated sensing and communication (ISAC)-enabled V2X networks. Specifically, we first model the dynamic and uncertain nature of V2X environments as a Markov Decision Process. This formulation allows the roadside unit to generate beamforming decisions based solely on current sensing information, thereby eliminating the need for frequent pilot transmissions and extensive channel state information acquisition. We then develop a deep reinforcement learning (DRL) algorithm to jointly optimize beamforming and power allocation, ensuring both communication throughput and sensing accuracy in highly dynamic scenario. To address the high energy demands of conventional learning-based schemes, we embed spiking neural networks (SNNs) into the DRL framework. Leveraging their event-driven and sparsely activated architecture, SNNs significantly enhance energy efficiency while maintaining robust performance. Simulation results confirm that the proposed method achieves substantial energy savings and superior communication performance, demonstrating its potential to support green and sustainable connectivity in future V2X systems.
Privacy-Preserving Driver Drowsiness Detection with Spatial Self-Attention and Federated Learning
Aug 01, 2025Driver drowsiness is one of the main causes of road accidents and is recognized as a leading contributor to traffic-related fatalities. However, detecting drowsiness accurately remains a challenging task, especially in real-world settings where facial data from different individuals is decentralized and highly diverse. In this paper, we propose a novel framework for drowsiness detection that is designed to work effectively with heterogeneous and decentralized data. Our approach develops a new Spatial Self-Attention (SSA) mechanism integrated with a Long Short-Term Memory (LSTM) network to better extract key facial features and improve detection performance. To support federated learning, we employ a Gradient Similarity Comparison (GSC) that selects the most relevant trained models from different operators before aggregation. This improves the accuracy and robustness of the global model while preserving user privacy. We also develop a customized tool that automatically processes video data by extracting frames, detecting and cropping faces, and applying data augmentation techniques such as rotation, flipping, brightness adjustment, and zooming. Experimental results show that our framework achieves a detection accuracy of 89.9% in the federated learning settings, outperforming existing methods under various deployment scenarios. The results demonstrate the effectiveness of our approach in handling real-world data variability and highlight its potential for deployment in intelligent transportation systems to enhance road safety through early and reliable drowsiness detection.
Towards Autonomous Riding: A Review of Perception, Planning, and Control in Intelligent Two-Wheelers
Jul 16, 2025The rapid adoption of micromobility solutions, particularly two-wheeled vehicles like e-scooters and e-bikes, has created an urgent need for reliable autonomous riding (AR) technologies. While autonomous driving (AD) systems have matured significantly, AR presents unique challenges due to the inherent instability of two-wheeled platforms, limited size, limited power, and unpredictable environments, which pose very serious concerns about road users' safety. This review provides a comprehensive analysis of AR systems by systematically examining their core components, perception, planning, and control, through the lens of AD technologies. We identify critical gaps in current AR research, including a lack of comprehensive perception systems for various AR tasks, limited industry and government support for such developments, and insufficient attention from the research community. The review analyses the gaps of AR from the perspective of AD to highlight promising research directions, such as multimodal sensor techniques for lightweight platforms and edge deep learning architectures. By synthesising insights from AD research with the specific requirements of AR, this review aims to accelerate the development of safe, efficient, and scalable autonomous riding systems for future urban mobility.
"Security for Everyone" in Finite Blocklength IRS-aided Systems With Perfect and Imperfect CSI
Apr 07, 2025Provisioning secrecy for all users, given the heterogeneity in their channel conditions, locations, and the unknown location of the attacker/eavesdropper, is challenging and not always feasible. The problem is even more difficult under finite blocklength constraints that are popular in ultra-reliable low-latency communication (URLLC) and massive machine-type communications (mMTC). This work takes the first step to guarantee secrecy for all URLLC/mMTC users in the finite blocklength regime (FBR) where intelligent reflecting surfaces (IRS) are used to enhance legitimate users' reception and thwart the potential eavesdropper (Eve) from intercepting. To that end, we aim to maximize the minimum secrecy rate (SR) among all users by jointly optimizing the transmitter's beamforming and IRS's passive reflective elements (PREs) under the FBR latency constraints. The resulting optimization problem is non-convex and even more complicated under imperfect channel state information (CSI). To tackle it, we linearize the objective function, and decompose the problem into sequential subproblems. When perfect CSI is not available, we use the successive convex approximation (SCA) approach to transform imperfect CSI-related semi-infinite constraints into finite linear matrix inequalities (LMI).
Secure Communications for All Users in Low-Resolution IRS-aided Systems Under Imperfect and Unknown CSI
Apr 07, 2025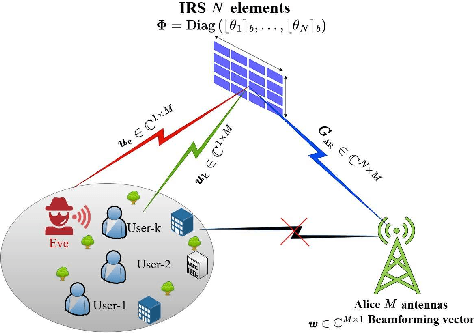
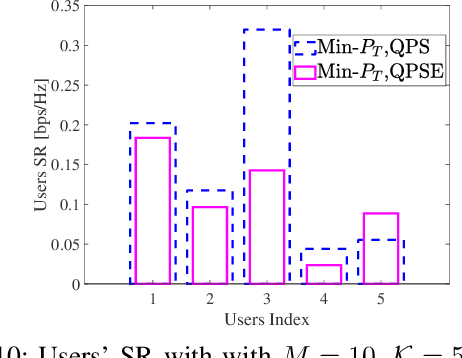
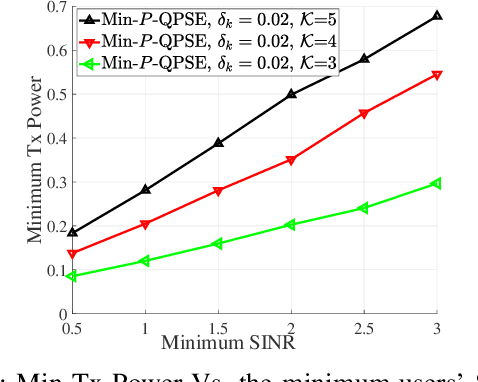
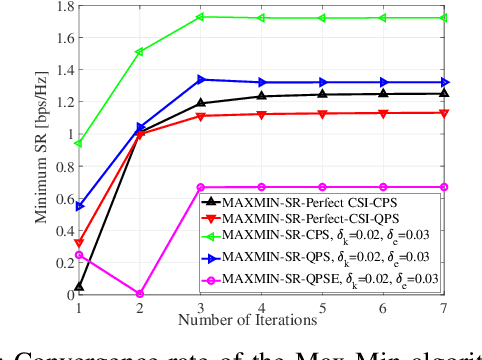
Provisioning secrecy for all users, given the heterogeneity and uncertainty of their channel conditions, locations, and the unknown location of the attacker/eavesdropper, is challenging and not always feasible. This work takes the first step to guarantee secrecy for all users where a low resolution intelligent reflecting surfaces (IRS) is used to enhance legitimate users' reception and thwart the potential eavesdropper (Eve) from intercepting. In real-life scenarios, due to hardware limitations of the IRS' passive reflective elements (PREs), the use of a full-resolution (continuous) phase shift (CPS) is impractical. In this paper, we thus consider a more practical case where the phase shift (PS) is modeled by a low-resolution (quantized) phase shift (QPS) while addressing the phase shift error (PSE) induced by the imperfect channel state information (CSI). To that end, we aim to maximize the minimum secrecy rate (SR) among all users by jointly optimizing the transmitter's beamforming vector and the IRS's passive reflective elements (PREs) under perfect/imperfect/unknown CSI. The resulting optimization problem is non-convex and even more complicated under imperfect/unknown CSI.
Right Reward Right Time for Federated Learning
Mar 10, 2025Critical learning periods (CLPs) in federated learning (FL) refer to early stages during which low-quality contributions (e.g., sparse training data availability) can permanently impair the learning performance of the global model owned by the model owner (i.e., the cloud server). However, strategies to motivate clients with high-quality contributions to join the FL training process and share trained model updates during CLPs remain underexplored. Additionally, existing incentive mechanisms in FL treat all training periods equally, which consequently fails to motivate clients to participate early. Compounding this challenge is the cloud's limited knowledge of client training capabilities due to privacy regulations, leading to information asymmetry. Therefore, in this article, we propose a time-aware incentive mechanism, called Right Reward Right Time (R3T), to encourage client involvement, especially during CLPs, to maximize the utility of the cloud in FL. Specifically, the cloud utility function captures the trade-off between the achieved model performance and payments allocated for clients' contributions, while accounting for clients' time and system capabilities, efforts, joining time, and rewards. Then, we analytically derive the optimal contract for the cloud and devise a CLP-aware mechanism to incentivize early participation and efforts while maximizing cloud utility, even under information asymmetry. By providing the right reward at the right time, our approach can attract the highest-quality contributions during CLPs. Simulation and proof-of-concept studies show that R3T increases cloud utility and is more economically effective than benchmarks. Notably, our proof-of-concept results show up to a 47.6% reduction in the total number of clients and up to a 300% improvement in convergence time while reaching competitive test accuracies compared with incentive mechanism benchmarks.
End-to-End Human Pose Reconstruction from Wearable Sensors for 6G Extended Reality Systems
Mar 06, 2025Full 3D human pose reconstruction is a critical enabler for extended reality (XR) applications in future sixth generation (6G) networks, supporting immersive interactions in gaming, virtual meetings, and remote collaboration. However, achieving accurate pose reconstruction over wireless networks remains challenging due to channel impairments, bit errors, and quantization effects. Existing approaches often assume error-free transmission in indoor settings, limiting their applicability to real-world scenarios. To address these challenges, we propose a novel deep learning-based framework for human pose reconstruction over orthogonal frequency-division multiplexing (OFDM) systems. The framework introduces a two-stage deep learning receiver: the first stage jointly estimates the wireless channel and decodes OFDM symbols, and the second stage maps the received sensor signals to full 3D body poses. Simulation results demonstrate that the proposed neural receiver reduces bit error rate (BER), thus gaining a 5 dB gap at $10^{-4}$ BER, compared to the baseline method that employs separate signal detection steps, i.e., least squares channel estimation and linear minimum mean square error equalization. Additionally, our empirical findings show that 8-bit quantization is sufficient for accurate pose reconstruction, achieving a mean squared error of $5\times10^{-4}$ for reconstructed sensor signals, and reducing joint angular error by 37\% for the reconstructed human poses compared to the baseline.
Multiple-Input Variational Auto-Encoder for Anomaly Detection in Heterogeneous Data
Jan 14, 2025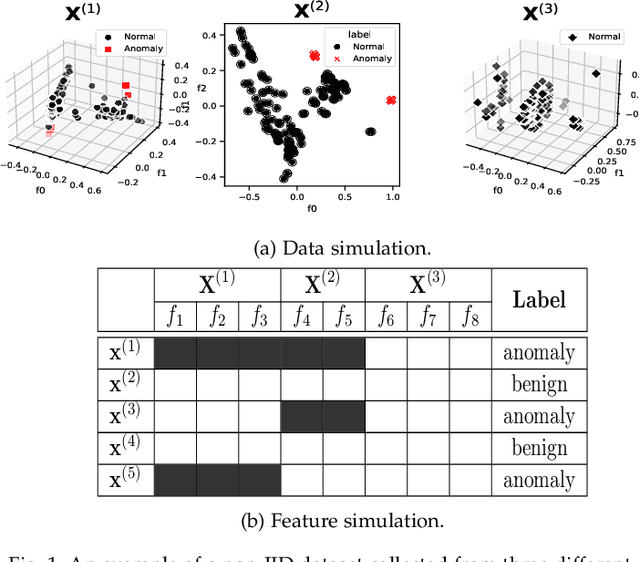
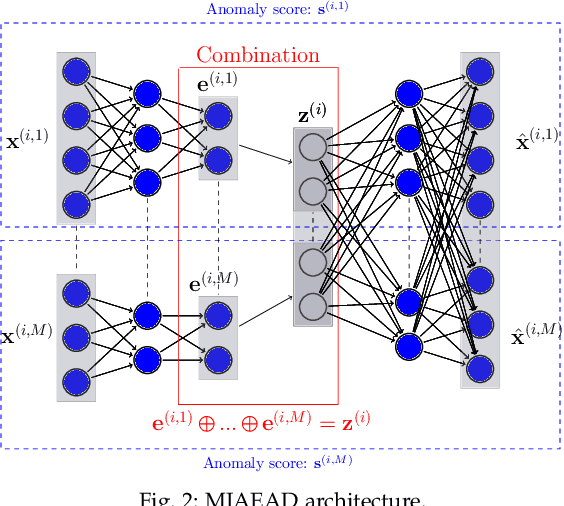
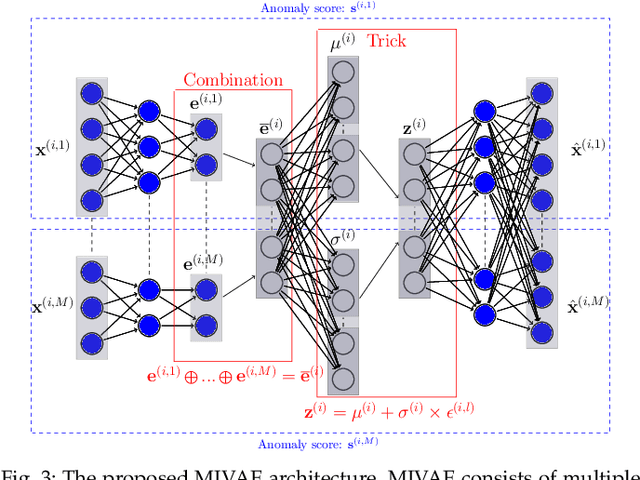
Anomaly detection (AD) plays a pivotal role in AI applications, e.g., in classification, and intrusion/threat detection in cybersecurity. However, most existing methods face challenges of heterogeneity amongst feature subsets posed by non-independent and identically distributed (non-IID) data. We propose a novel neural network model called Multiple-Input Auto-Encoder for AD (MIAEAD) to address this. MIAEAD assigns an anomaly score to each feature subset of a data sample to indicate its likelihood of being an anomaly. This is done by using the reconstruction error of its sub-encoder as the anomaly score. All sub-encoders are then simultaneously trained using unsupervised learning to determine the anomaly scores of feature subsets. The final AUC of MIAEAD is calculated for each sub-dataset, and the maximum AUC obtained among the sub-datasets is selected. To leverage the modelling of the distribution of normal data to identify anomalies of the generative models, we develop a novel neural network architecture/model called Multiple-Input Variational Auto-Encoder (MIVAE). MIVAE can process feature subsets through its sub-encoders before learning distribution of normal data in the latent space. This allows MIVAE to identify anomalies that deviate from the learned distribution. We theoretically prove that the difference in the average anomaly score between normal samples and anomalies obtained by the proposed MIVAE is greater than that of the Variational Auto-Encoder (VAEAD), resulting in a higher AUC for MIVAE. Extensive experiments on eight real-world anomaly datasets demonstrate the superior performance of MIAEAD and MIVAE over conventional methods and the state-of-the-art unsupervised models, by up to 6% in terms of AUC score. Alternatively, MIAEAD and MIVAE have a high AUC when applied to feature subsets with low heterogeneity based on the coefficient of variation (CV) score.