 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse Attention-driven Quality Prediction for Production Process Optimization in Digital Twins
May 20, 2024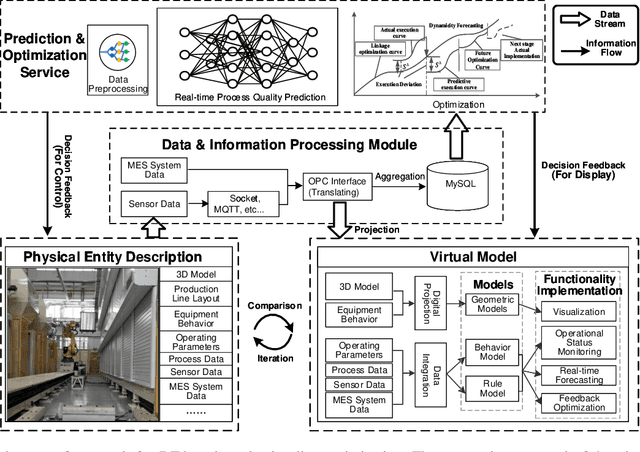
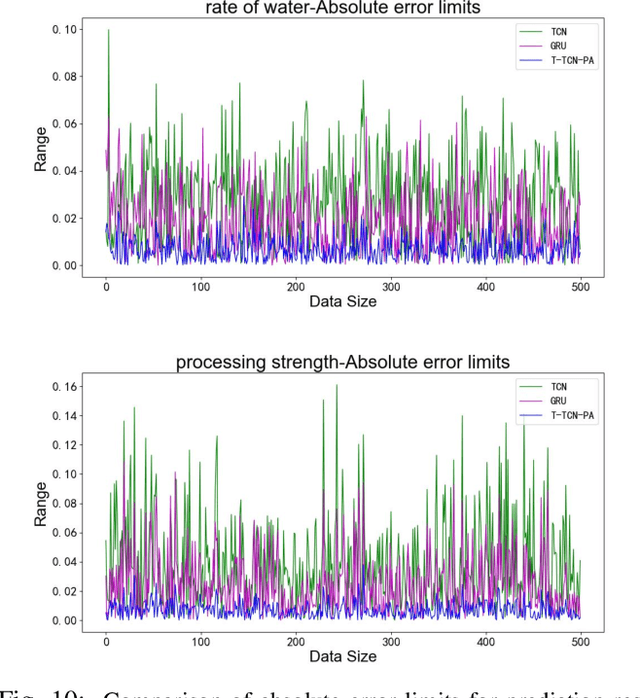
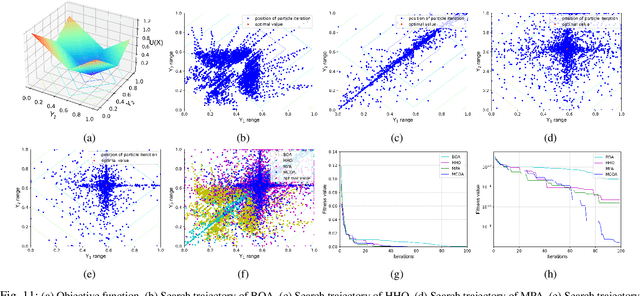
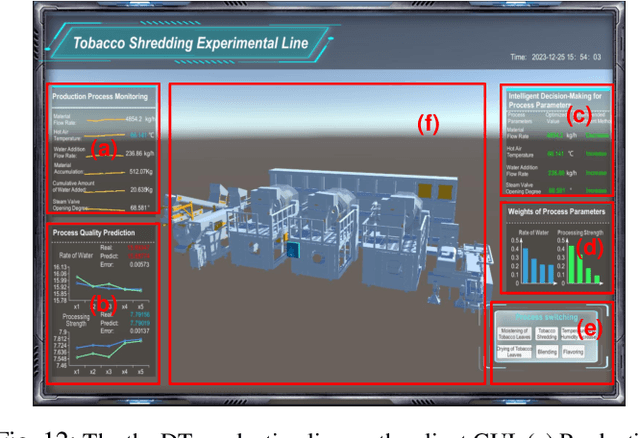
In the process industry, optimizing production lines for long-term efficiency requires real-time monitoring and analysis of operation states to fine-tune production line parameters. However, the complexity in operational logic and the intricate coupling of production process parameters make it difficult to develop an accurate mathematical model for the entire process, thus hindering the deployment of efficient optimization mechanisms. In view of these difficulties, we propose to deploy a digital twin of the production line by digitally abstracting its physical layout and operational logic. By iteratively mapping the real-world data reflecting equipment operation status and product quality inspection in the digital twin, we adopt a quality prediction model for production process based on self-attention-enabled temporal convolutional neural networks. This model enables the data-driven state evolution of the digital twin. The digital twin takes a role of aggregating the information of actual operating conditions and the results of quality-sensitive analysis, which facilitates the optimization of process production quality with virtual-reality evolution under multi-dimensional constraints. Leveraging the digital twin model as an information-flow carrier, we extract temporal features from key process indicators and establish a production process quality prediction model based on the proposed composite neural network. Our operation experiments on a specific tobacco shredding line demonstrate that the proposed digital twin-based production process optimization method fosters seamless integration between virtual and real production lines. This integration achieves an average operating status prediction accuracy of over 98\% and near-optimal production process control.
AcademicGPT: Empowering Academic Research
Nov 21, 2023



Large Language Models (LLMs) have demonstrated exceptional capabilities across various natural language processing tasks. Yet, many of these advanced LLMs are tailored for broad, general-purpose applications. In this technical report, we introduce AcademicGPT, designed specifically to empower academic research. AcademicGPT is a continual training model derived from LLaMA2-70B. Our training corpus mainly consists of academic papers, thesis, content from some academic domain, high-quality Chinese data and others. While it may not be extensive in data scale, AcademicGPT marks our initial venture into a domain-specific GPT tailored for research area. We evaluate AcademicGPT on several established public benchmarks such as MMLU and CEval, as well as on some specialized academic benchmarks like PubMedQA, SCIEval, and our newly-created ComputerScienceQA, to demonstrate its ability from general knowledge ability, to Chinese ability, and to academic ability. Building upon AcademicGPT's foundation model, we also developed several applications catered to the academic area, including General Academic Question Answering, AI-assisted Paper Reading, Paper Review, and AI-assisted Title and Abstract Generation.
SimpleDG: Simple Domain Generalization Baseline without Bells and Whistles
Oct 26, 2022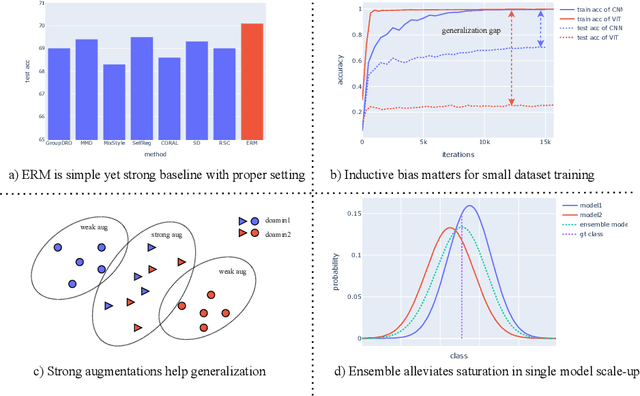
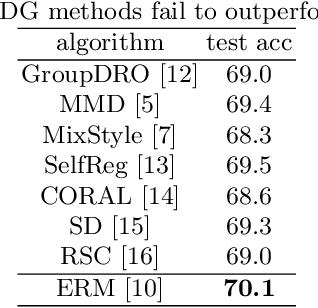
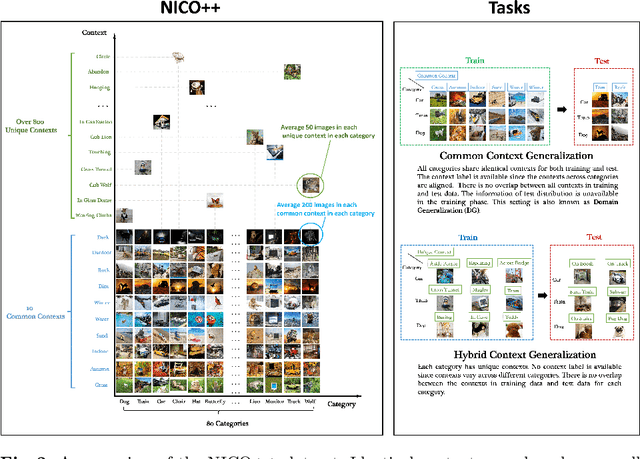
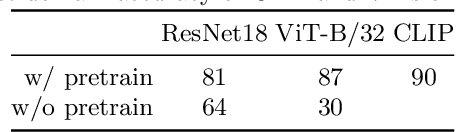
We present a simple domain generalization baseline, which wins second place in both the common context generalization track and the hybrid context generalization track respectively in NICO CHALLENGE 2022. We verify the founding in recent literature, domainbed, that ERM is a strong baseline compared to recent state-of-the-art domain generalization methods and propose SimpleDG which includes several simple yet effective designs that further boost generalization performance. Code is available at https://github.com/megvii-research/SimpleDG
Distributed Spatio-Temporal Information Based Cooperative 3D Positioning in GNSS-Denied Environments
Aug 25, 2022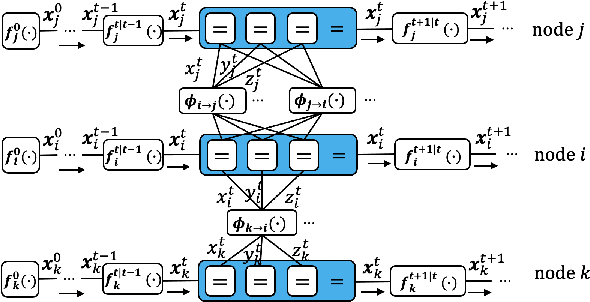

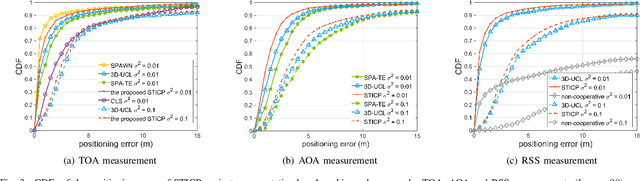
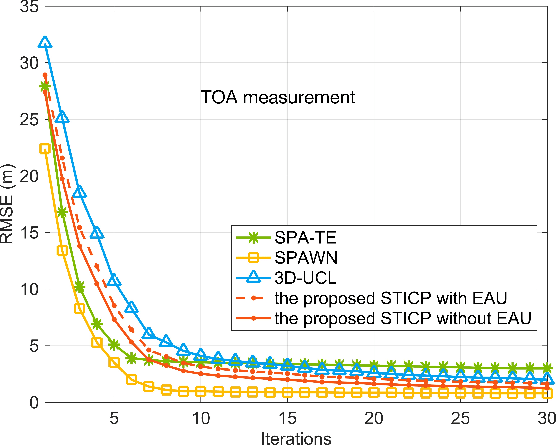
A distributed spatio-temporal information based cooperative positioning (STICP) algorithm is proposed for wireless networks that require three-dimensional (3D) coordinates and operate in the global navigation satellite system (GNSS) denied environments. Our algorithm supports any type of ranging measurements that can determine the distance between nodes. We first utilize a finite symmetric sampling based scaled unscented transform (SUT) method for approximating the nonlinear terms of the messages passing on the associated factor graph (FG) with high precision, despite relying on a small number of samples. Then, we propose an enhanced anchor upgrading mechanism to avoid any redundant iterations. Our simulation results and analysis show that the proposed STICP has a lower computational complexity than the state-of-the-art belief propagation based localizer, despite achieving an even more competitive positioning performance.