 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlchemy: A structured task distribution for meta-reinforcement learning
Feb 04, 2021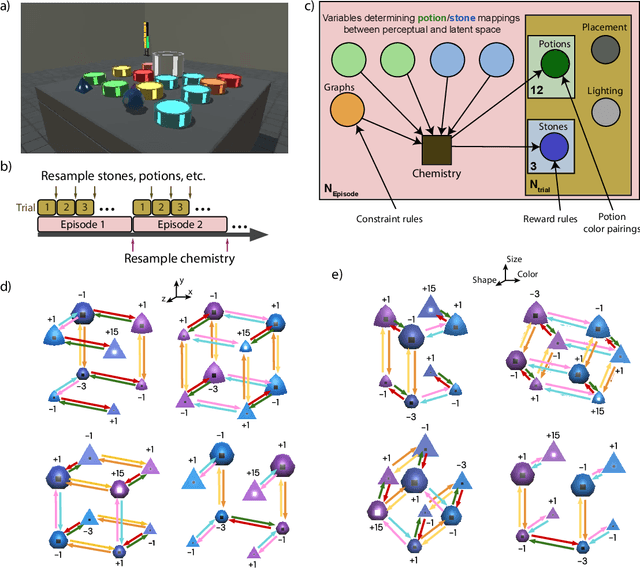
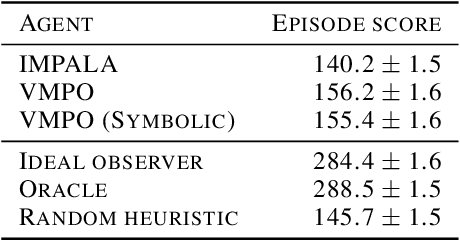
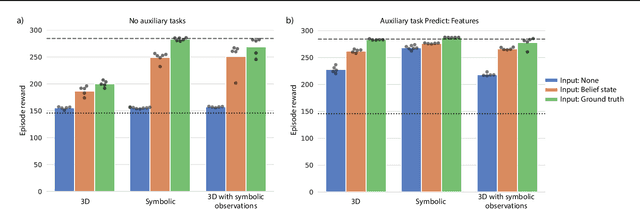
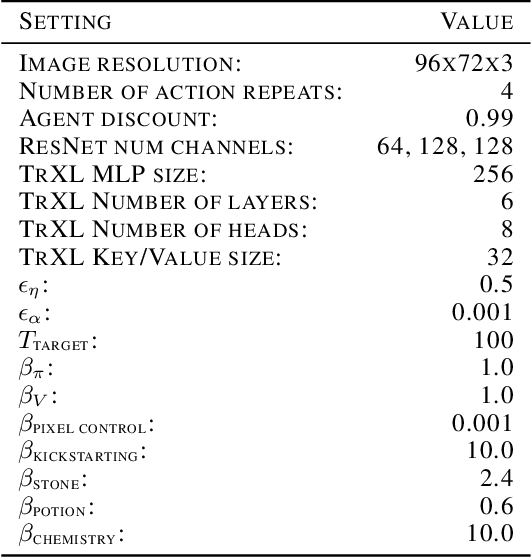
There has been rapidly growing interest in meta-learning as a method for increasing the flexibility and sample efficiency of reinforcement learning. One problem in this area of research, however, has been a scarcity of adequate benchmark tasks. In general, the structure underlying past benchmarks has either been too simple to be inherently interesting, or too ill-defined to support principled analysis. In the present work, we introduce a new benchmark for meta-RL research, which combines structural richness with structural transparency. Alchemy is a 3D video game, implemented in Unity, which involves a latent causal structure that is resampled procedurally from episode to episode, affording structure learning, online inference, hypothesis testing and action sequencing based on abstract domain knowledge. We evaluate a pair of powerful RL agents on Alchemy and present an in-depth analysis of one of these agents. Results clearly indicate a frank and specific failure of meta-learning, providing validation for Alchemy as a challenging benchmark for meta-RL. Concurrent with this report, we are releasing Alchemy as public resource, together with a suite of analysis tools and sample agent trajectories.
Automated curricula through setter-solver interactions
Sep 27, 2019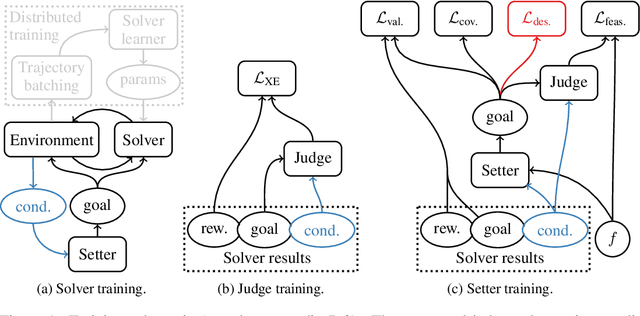
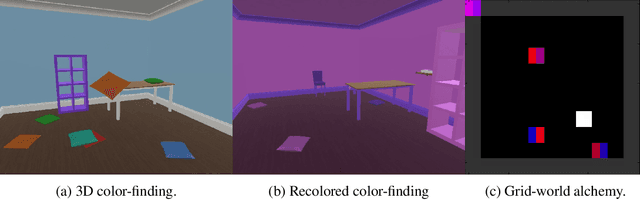
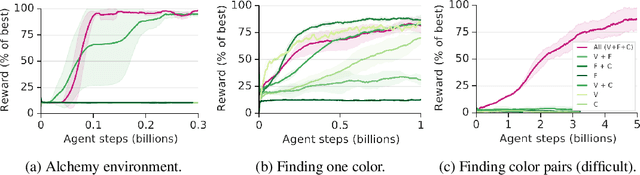
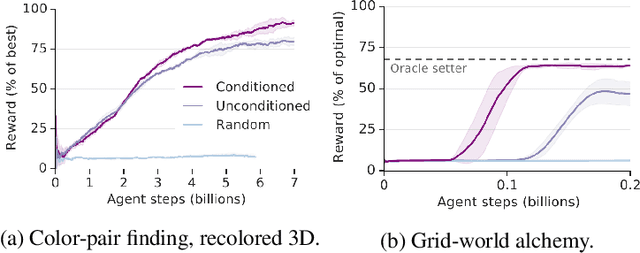
Reinforcement learning algorithms use correlations between policies and rewards to improve agent performance. But in dynamic or sparsely rewarding environments these correlations are often too small, or rewarding events are too infrequent to make learning feasible. Human education instead relies on curricula--the breakdown of tasks into simpler, static challenges with dense rewards--to build up to complex behaviors. While curricula are also useful for artificial agents, hand-crafting them is time consuming. This has lead researchers to explore automatic curriculum generation. Here we explore automatic curriculum generation in rich, dynamic environments. Using a setter-solver paradigm we show the importance of considering goal validity, goal feasibility, and goal coverage to construct useful curricula. We demonstrate the success of our approach in rich but sparsely rewarding 2D and 3D environments, where an agent is tasked to achieve a single goal selected from a set of possible goals that varies between episodes, and identify challenges for future work. Finally, we demonstrate the value of a novel technique that guides agents towards a desired goal distribution. Altogether, these results represent a substantial step towards applying automatic task curricula to learn complex, otherwise unlearnable goals, and to our knowledge are the first to demonstrate automated curriculum generation for goal-conditioned agents in environments where the possible goals vary between episodes.
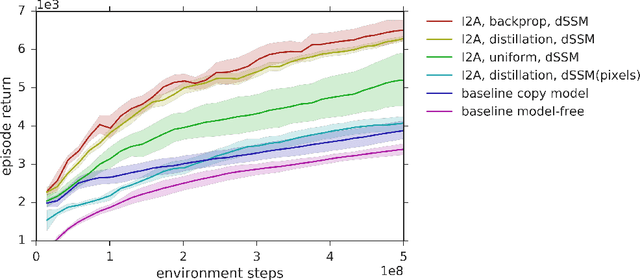
Imagination-Augmented Agents for Deep Reinforcement Learning
Feb 14, 2018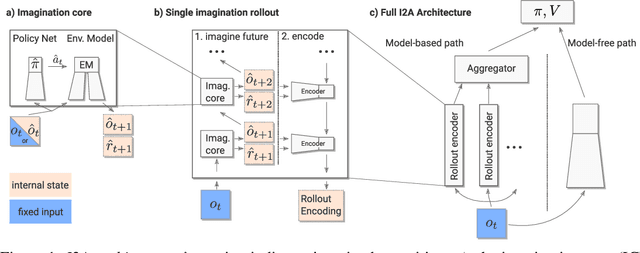


We introduce Imagination-Augmented Agents (I2As), a novel architecture for deep reinforcement learning combining model-free and model-based aspects. In contrast to most existing model-based reinforcement learning and planning methods, which prescribe how a model should be used to arrive at a policy, I2As learn to interpret predictions from a learned environment model to construct implicit plans in arbitrary ways, by using the predictions as additional context in deep policy networks. I2As show improved data efficiency, performance, and robustness to model misspecification compared to several baselines.
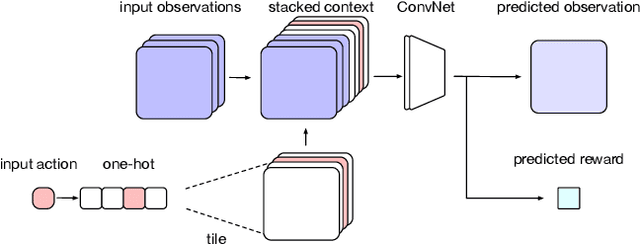
Learning and Querying Fast Generative Models for Reinforcement Learning
Feb 08, 2018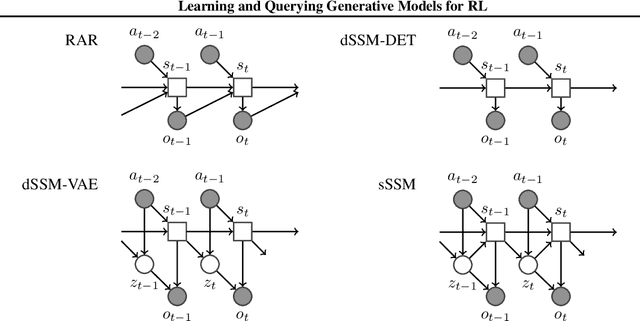

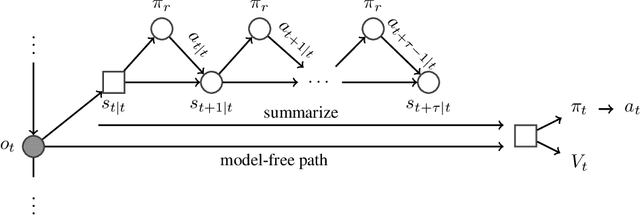
A key challenge in model-based reinforcement learning (RL) is to synthesize computationally efficient and accurate environment models. We show that carefully designed generative models that learn and operate on compact state representations, so-called state-space models, substantially reduce the computational costs for predicting outcomes of sequences of actions. Extensive experiments establish that state-space models accurately capture the dynamics of Atari games from the Arcade Learning Environment from raw pixels. The computational speed-up of state-space models while maintaining high accuracy makes their application in RL feasible: We demonstrate that agents which query these models for decision making outperform strong model-free baselines on the game MSPACMAN, demonstrating the potential of using learned environment models for planning.
Neuronal Synchrony in Complex-Valued Deep Networks
Mar 22, 2014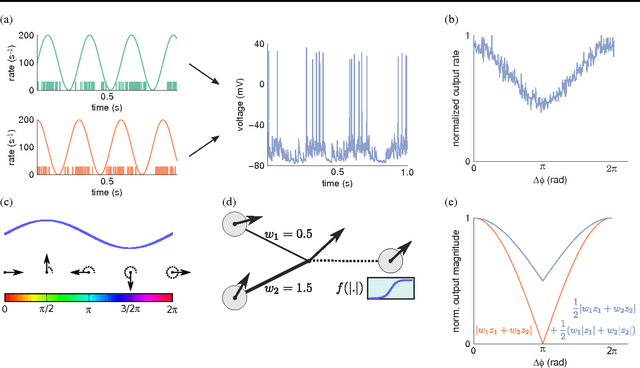
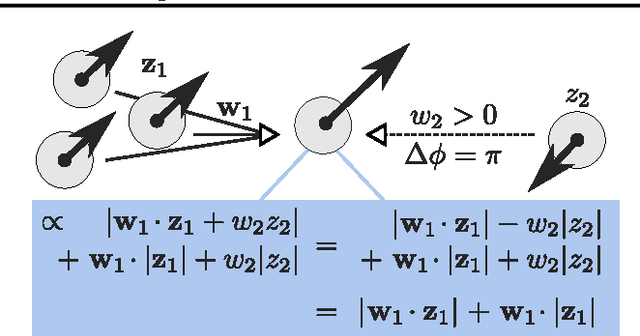
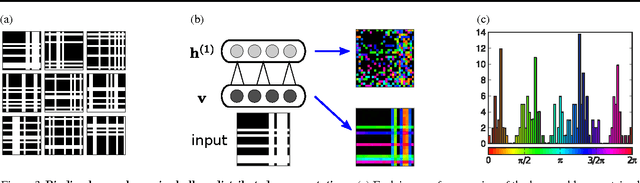
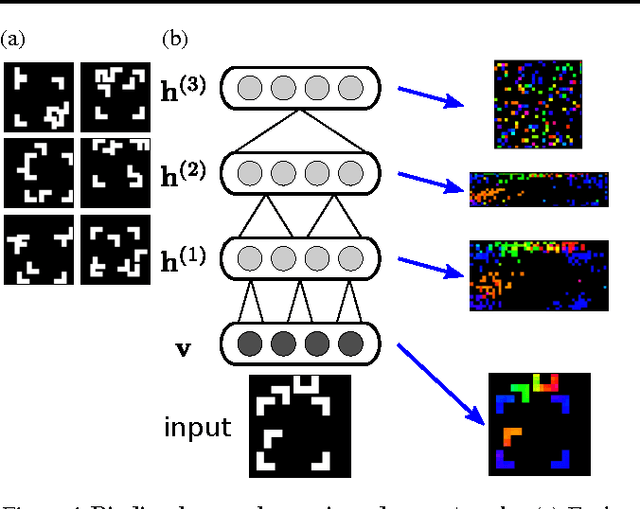
Deep learning has recently led to great successes in tasks such as image recognition (e.g Krizhevsky et al., 2012). However, deep networks are still outmatched by the power and versatility of the brain, perhaps in part due to the richer neuronal computations available to cortical circuits. The challenge is to identify which neuronal mechanisms are relevant, and to find suitable abstractions to model them. Here, we show how aspects of spike timing, long hypothesized to play a crucial role in cortical information processing, could be incorporated into deep networks to build richer, versatile representations. We introduce a neural network formulation based on complex-valued neuronal units that is not only biologically meaningful but also amenable to a variety of deep learning frameworks. Here, units are attributed both a firing rate and a phase, the latter indicating properties of spike timing. We show how this formulation qualitatively captures several aspects thought to be related to neuronal synchrony, including gating of information processing and dynamic binding of distributed object representations. Focusing on the latter, we demonstrate the potential of the approach in several simple experiments. Thus, neuronal synchrony could be a flexible mechanism that fulfills multiple functional roles in deep networks.