 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning adaptive manipulation of objects with revolute joint: A case study on varied cabinet doors opening
Apr 28, 2023



This paper introduces a learning-based framework for robot adaptive manipulating the object with a revolute joint in unstructured environments. We concentrate our discussion on various cabinet door opening tasks. To improve the performance of Deep Reinforcement Learning in this scene, we analytically provide an efficient sampling manner utilizing the constraints of the objects. To open various kinds of doors, we add encoded environment parameters that define the various environments to the input of out policy. To transfer the policy into the real world, we train an adaptation module in simulation and fine-tune the adaptation module to cut down the impact of the policy-unaware environment parameters. We design a series of experiments to validate the efficacy of our framework. Additionally, we testify to the model's performance in the real world compared to the traditional door opening method.
Electric Vehicle Automatic Charging System Based on Vision-force Fusion
Oct 18, 2021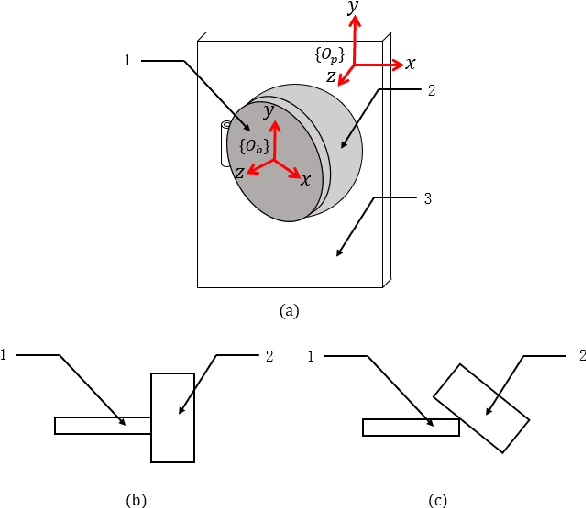
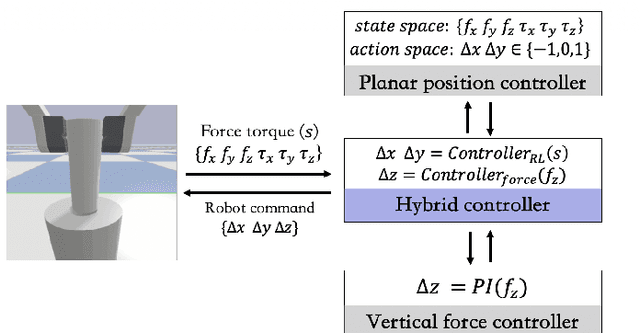
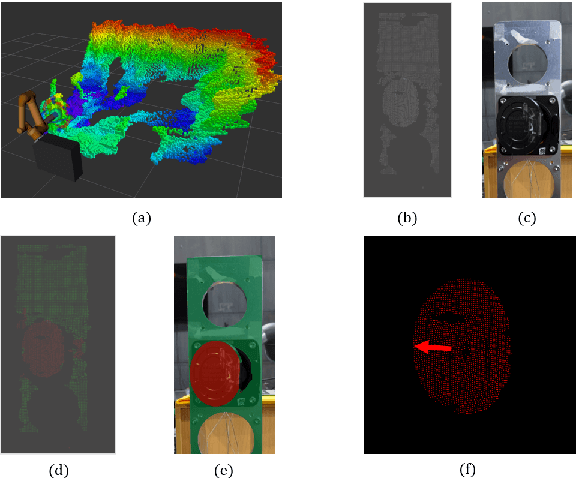
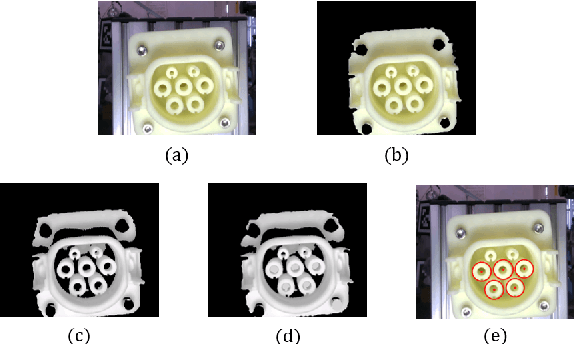
Electric vehicles are an emerging means of transportation with environmental friendliness. The automatic charging is a hot topic in this field that is full of challenges. We introduce a complete automatic charging system based on vision-force fusion, which includes perception, planning and control for robot manipulations of the system. We design the whole system in simulation and transfer it to the real world. The experimental results prove the effectiveness of our system.
Efficient Object Manipulation to an Arbitrary Goal Pose: Learning-based Anytime Prioritized Planning
Sep 22, 2021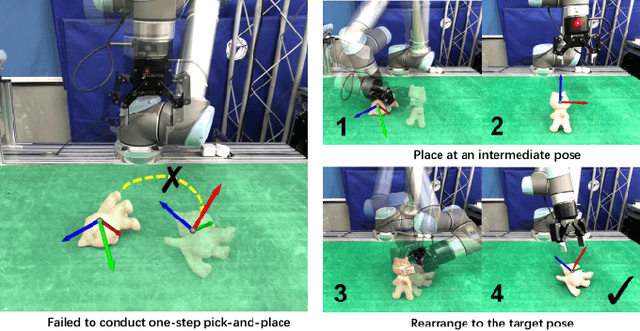
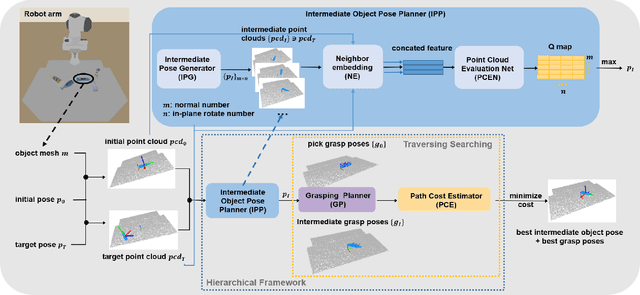
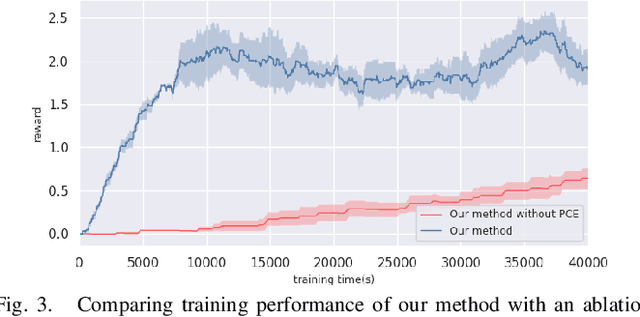
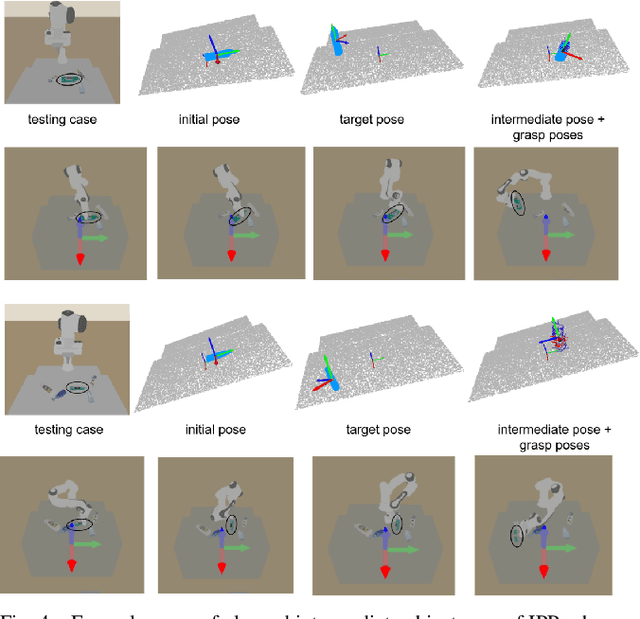
We focus on the task of object manipulation to an arbitrary goal pose, in which a robot is supposed to pick an assigned object to place at the goal position with a specific pose. However, limited by the execution space of the manipulator with gripper, one-step picking, moving and releasing might be failed, where an intermediate object pose is required as a transition. In this paper, we propose a learning-driven anytime prioritized search-based solver to find a feasible solution with low path cost in a short time. In our work, the problem is formulated as a hierarchical learning problem, with the high level aiming at finding an intermediate object pose, and the low-level manipulator path planning between adjacent grasps. We learn an off-line training path cost estimator to predict approximate path planning costs, which serve as pseudo rewards to allow for pre-training the high-level planner without interacting with the simulator. To deal with the problem of distribution mismatch of the cost net and the actual execution cost space, a refined training stage is conducted with simulation interaction. A series of experiments carried out in simulation and real world indicate that our system can achieve better performances in the object manipulation task with less time and less cost.
Neural Motion Prediction for In-flight Uneven Object Catching
Mar 15, 2021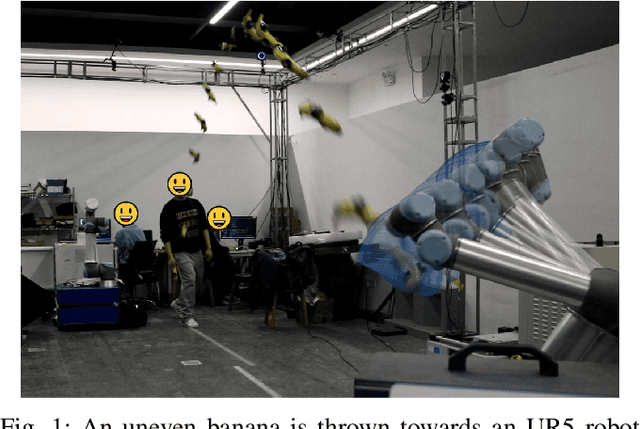
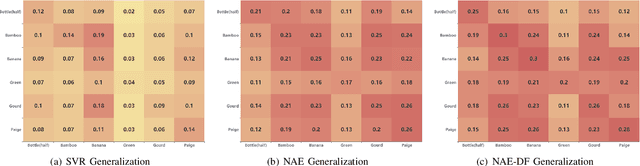
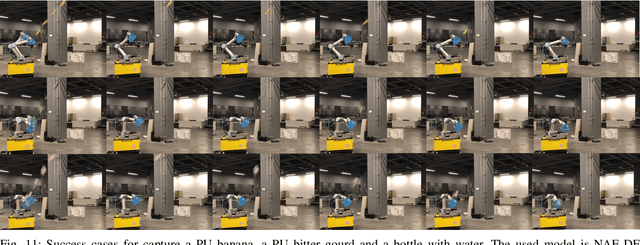

In-flight objects capture is extremely challenging. The robot is required to complete trajectory prediction, interception position calculation and motion planning in sequence within tens of milliseconds. As in-flight uneven objects are affected by various kinds of forces, motion prediction is difficult for a time-varying acceleration. In order to compensate the system's non-linearity, we introduce the Neural Acceleration Estimator (NAE) that estimates the varying acceleration by observing a small fragment of previous deflected trajectory. Moreover, end-to-end training with Differantiable Filter (NAE-DF) gives a supervision for measurement uncertainty and further improves the prediction accuracy. Experimental results show that motion prediction with NAE and NAE-DF is superior to other methods and has a good generalization performance on unseen objects. We test our methods on a robot, performing velocity control in real world and respectively achieve 83.3% and 86.7% success rate on a ploy urethane banana and a gourd. We also release an object in-flight dataset containing 1,500 trajectorys for uneven objects.
Champion Team Paper: Dynamic Passing-Shooting Algorithm Based on CUDA of The RoboCup SSL 2019 Champion
Sep 17, 2019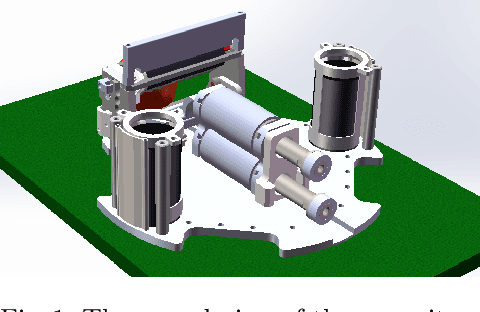
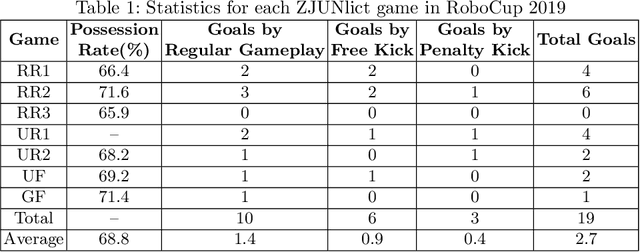
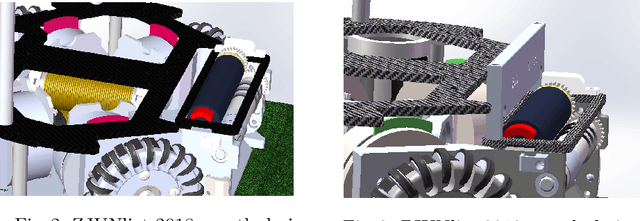
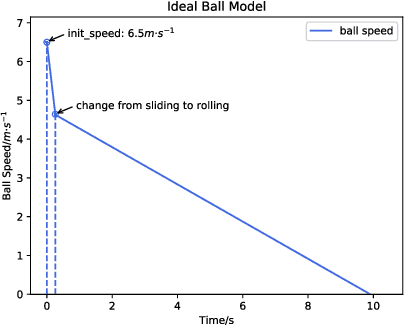
ZJUNlict became the Small Size League Champion of RoboCup 2019 with 6 victories and 1 tie for their 7 games. The overwhelming ability of ball-handling and passing allows ZJUNlict to greatly threaten its opponent and almost kept its goal clear without being threatened. This paper presents the core technology of its ball-handling and robot movement which consist of hardware optimization, dynamic passing and shooting strategy, and multi-agent cooperation and formation. We first describe the mechanical optimization on the placement of the capacitors, the redesign of the damping system of the dribbler and the electrical optimization on the replacement of the core chip. We then describe our passing point algorithm. The passing and shooting strategy can be separated into two different parts, where we search the passing point on SBIP-DPPS and evaluate the point based on the ball model. The statements and the conclusion should be supported by the performances and log of games on Small Size League RoboCup 2019.