Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElectric Vehicle Automatic Charging System Based on Vision-force Fusion
Paper and Code
Oct 18, 2021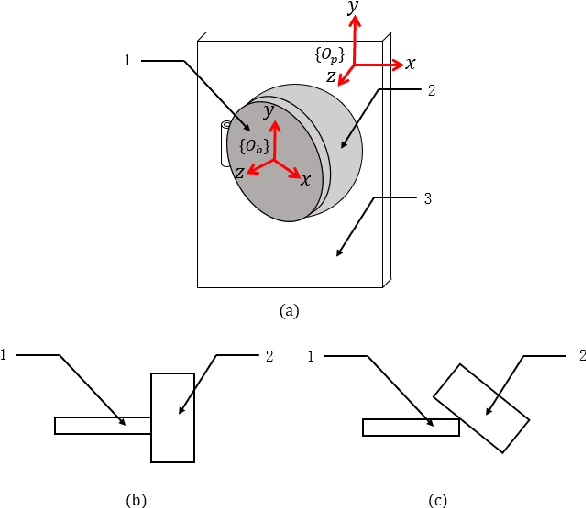
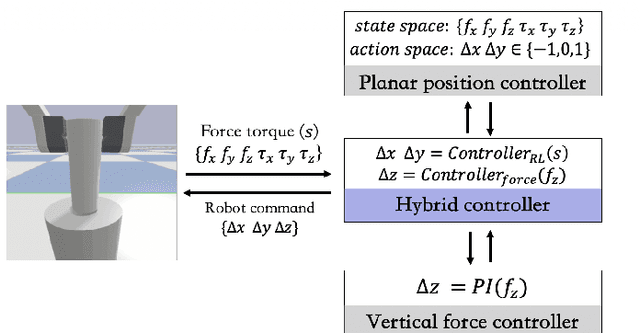
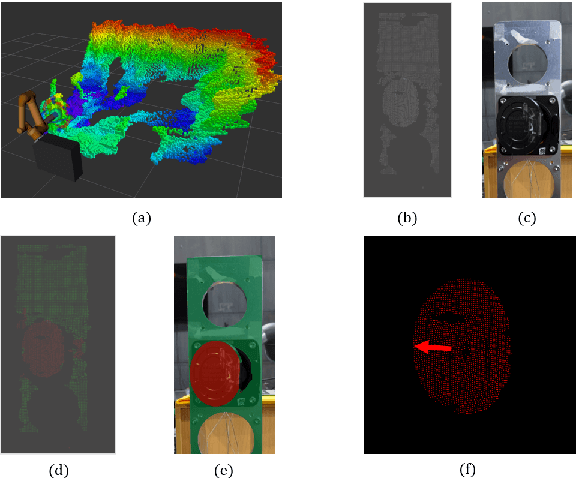
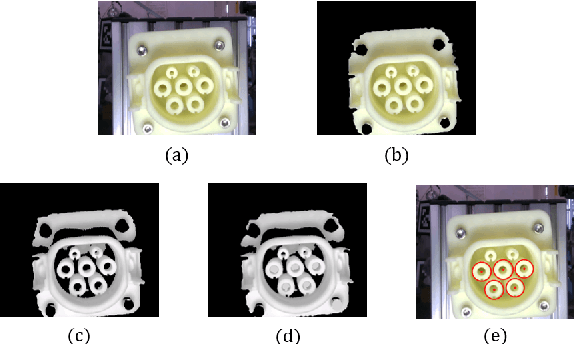
Electric vehicles are an emerging means of transportation with environmental friendliness. The automatic charging is a hot topic in this field that is full of challenges. We introduce a complete automatic charging system based on vision-force fusion, which includes perception, planning and control for robot manipulations of the system. We design the whole system in simulation and transfer it to the real world. The experimental results prove the effectiveness of our system.
View paper on