 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Object Manipulation to an Arbitrary Goal Pose: Learning-based Anytime Prioritized Planning
Paper and Code
Sep 22, 2021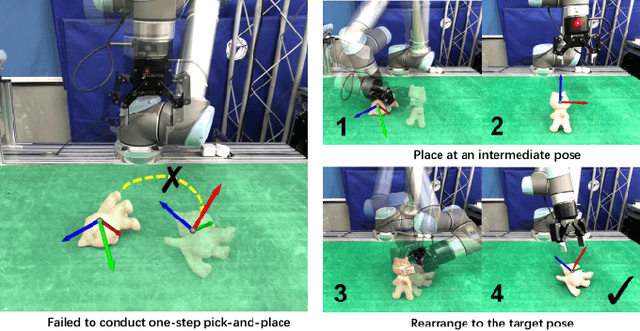
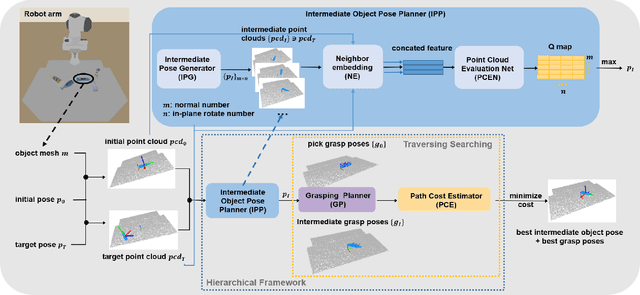
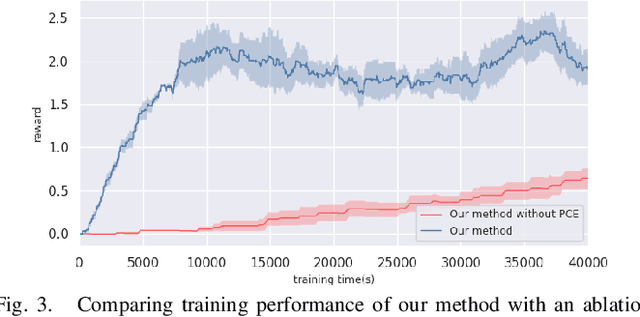
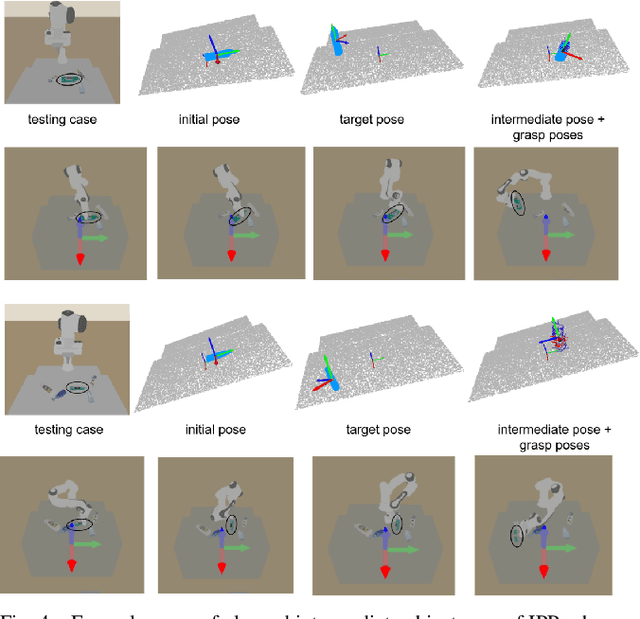
We focus on the task of object manipulation to an arbitrary goal pose, in which a robot is supposed to pick an assigned object to place at the goal position with a specific pose. However, limited by the execution space of the manipulator with gripper, one-step picking, moving and releasing might be failed, where an intermediate object pose is required as a transition. In this paper, we propose a learning-driven anytime prioritized search-based solver to find a feasible solution with low path cost in a short time. In our work, the problem is formulated as a hierarchical learning problem, with the high level aiming at finding an intermediate object pose, and the low-level manipulator path planning between adjacent grasps. We learn an off-line training path cost estimator to predict approximate path planning costs, which serve as pseudo rewards to allow for pre-training the high-level planner without interacting with the simulator. To deal with the problem of distribution mismatch of the cost net and the actual execution cost space, a refined training stage is conducted with simulation interaction. A series of experiments carried out in simulation and real world indicate that our system can achieve better performances in the object manipulation task with less time and less cost.