 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFEJ-VIRO: A Consistent First-Estimate Jacobian Visual-Inertial-Ranging Odometry
Jul 17, 2022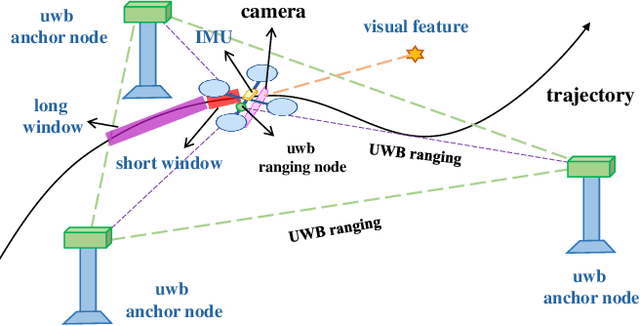
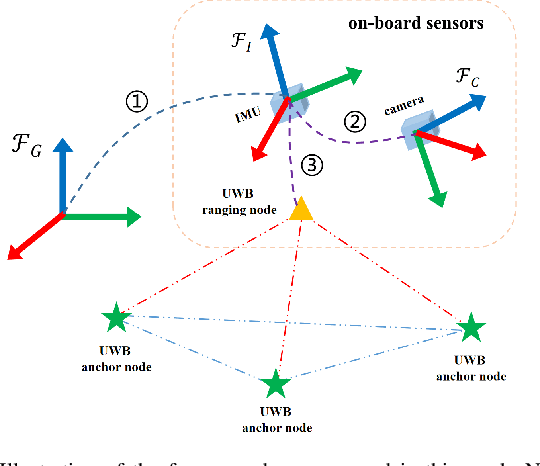
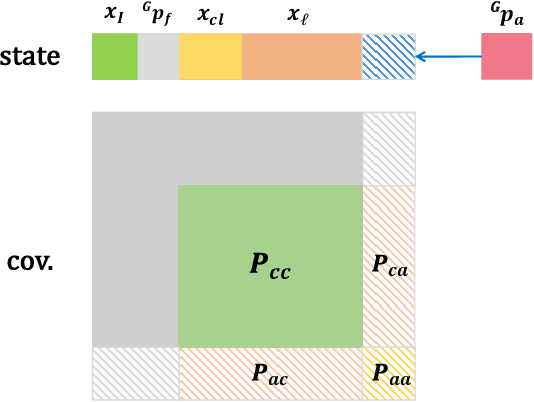

In recent years, Visual-Inertial Odometry (VIO) has achieved many significant progresses. However, VIO methods suffer from localization drift over long trajectories. In this paper, we propose a First-Estimates Jacobian Visual-Inertial-Ranging Odometry (FEJ-VIRO) to reduce the localization drifts of VIO by incorporating ultra-wideband (UWB) ranging measurements into the VIO framework \textit{consistently}. Considering that the initial positions of UWB anchors are usually unavailable, we propose a long-short window structure to initialize the UWB anchors' positions as well as the covariance for state augmentation. After initialization, the FEJ-VIRO estimates the UWB anchors' positions simultaneously along with the robot poses. We further analyze the observability of the visual-inertial-ranging estimators and proved that there are \textit{four} unobservable directions in the ideal case, while one of them vanishes in the actual case due to the gain of spurious information. Based on these analyses, we leverage the FEJ technique to enforce the unobservable directions, hence reducing inconsistency of the estimator. Finally, we validate our analysis and evaluate the proposed FEJ-VIRO with both simulation and real-world experiments.
Multi-agent Collaboration for Feasible Collaborative Behavior Construction and Evaluation
Sep 30, 2019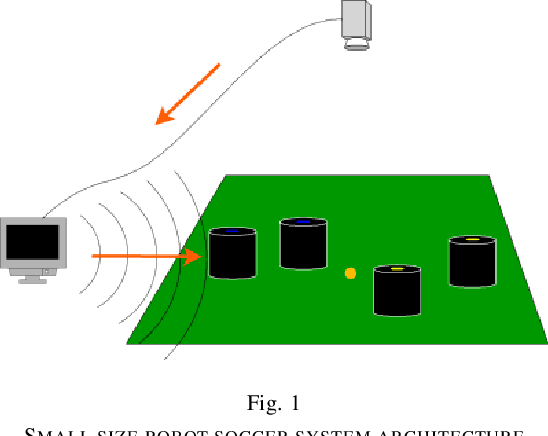
In the case of the two-person zero-sum stochastic game with a central controller, this paper proposes a best collaborative behavior search and selection algorithm based on reinforcement learning, in response to how to choose the best collaborative object and action for the central controller. In view of the existing multi-agent collaboration and confrontation reinforcement learning methods, the methods of traversing all actions in a certain state leads to the problem of long calculation time and unsafe policy exploration. This paper proposes to construct a feasible collaborative behavior set by using action space discretization, establishing models of both sides, model-based prediction and parallel search. Then, we use the deep q-learning method in reinforcement learning to train the scoring function to select the optimal collaboration behavior from the feasible collaborative behavior set. This method enables efficient and accurate calculation in an environment with strong confrontation, high dynamics and a large number of agents, which is verified by the RoboCup Small Size League robots passing collaboration.
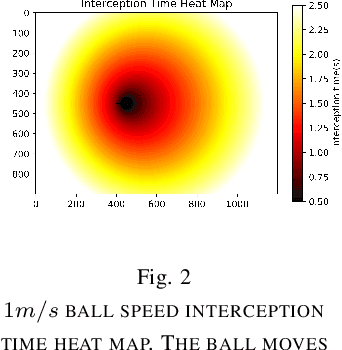
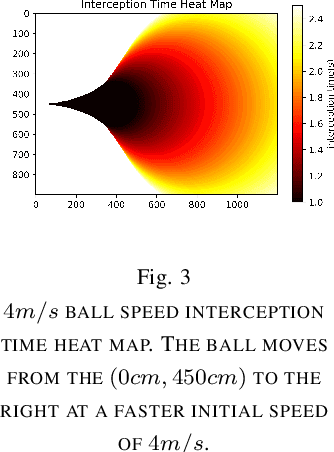
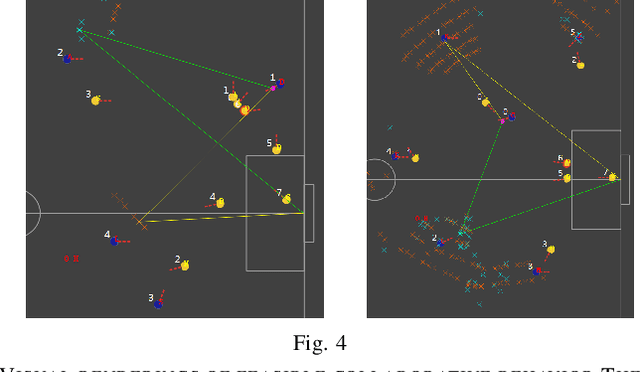
Champion Team Paper: Dynamic Passing-Shooting Algorithm Based on CUDA of The RoboCup SSL 2019 Champion
Sep 17, 2019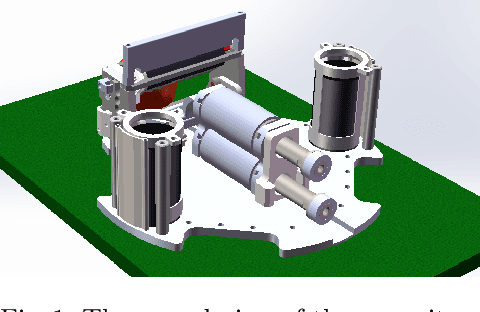
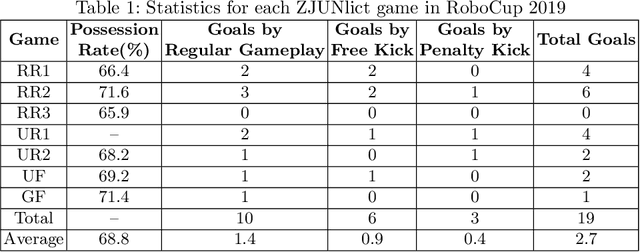
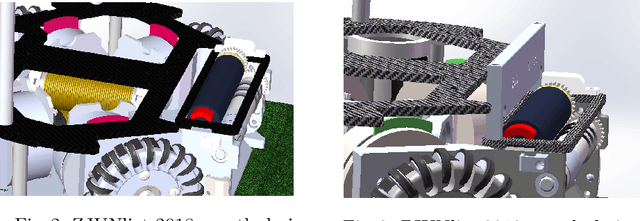
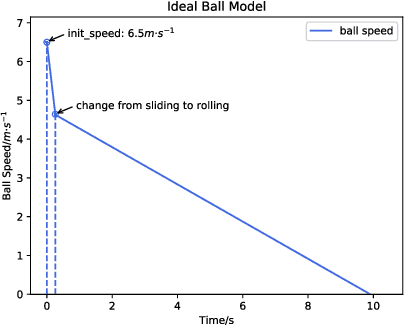
ZJUNlict became the Small Size League Champion of RoboCup 2019 with 6 victories and 1 tie for their 7 games. The overwhelming ability of ball-handling and passing allows ZJUNlict to greatly threaten its opponent and almost kept its goal clear without being threatened. This paper presents the core technology of its ball-handling and robot movement which consist of hardware optimization, dynamic passing and shooting strategy, and multi-agent cooperation and formation. We first describe the mechanical optimization on the placement of the capacitors, the redesign of the damping system of the dribbler and the electrical optimization on the replacement of the core chip. We then describe our passing point algorithm. The passing and shooting strategy can be separated into two different parts, where we search the passing point on SBIP-DPPS and evaluate the point based on the ball model. The statements and the conclusion should be supported by the performances and log of games on Small Size League RoboCup 2019.