 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFEJ-VIRO: A Consistent First-Estimate Jacobian Visual-Inertial-Ranging Odometry
Paper and Code
Jul 17, 2022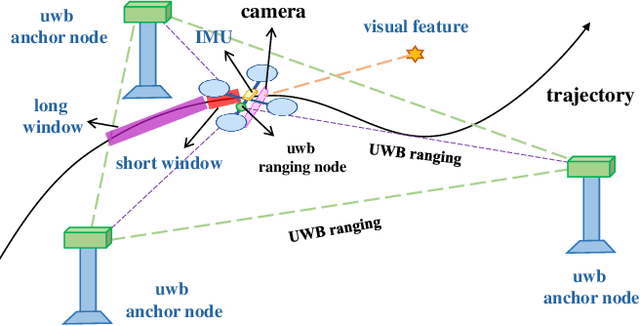
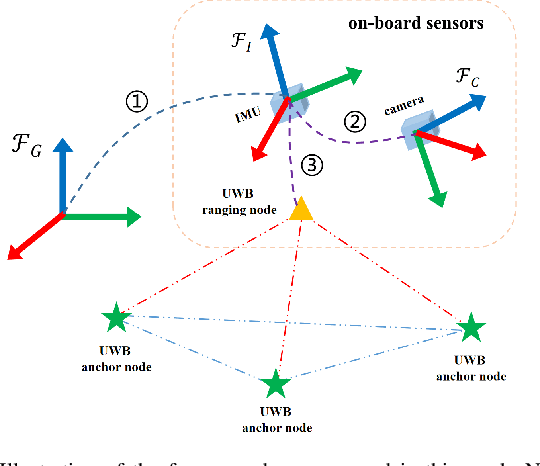
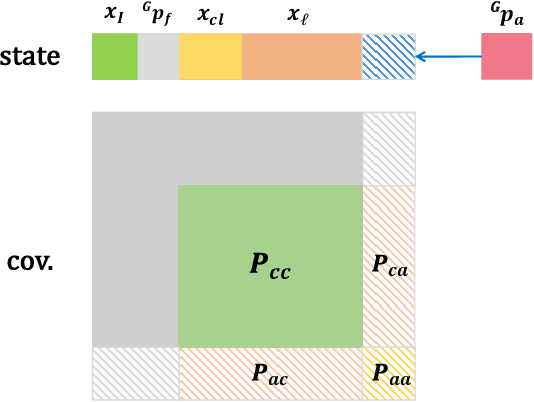

In recent years, Visual-Inertial Odometry (VIO) has achieved many significant progresses. However, VIO methods suffer from localization drift over long trajectories. In this paper, we propose a First-Estimates Jacobian Visual-Inertial-Ranging Odometry (FEJ-VIRO) to reduce the localization drifts of VIO by incorporating ultra-wideband (UWB) ranging measurements into the VIO framework \textit{consistently}. Considering that the initial positions of UWB anchors are usually unavailable, we propose a long-short window structure to initialize the UWB anchors' positions as well as the covariance for state augmentation. After initialization, the FEJ-VIRO estimates the UWB anchors' positions simultaneously along with the robot poses. We further analyze the observability of the visual-inertial-ranging estimators and proved that there are \textit{four} unobservable directions in the ideal case, while one of them vanishes in the actual case due to the gain of spurious information. Based on these analyses, we leverage the FEJ technique to enforce the unobservable directions, hence reducing inconsistency of the estimator. Finally, we validate our analysis and evaluate the proposed FEJ-VIRO with both simulation and real-world experiments.