 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearn to Differ: Sim2Real Small Defection Segmentation Network
Mar 07, 2021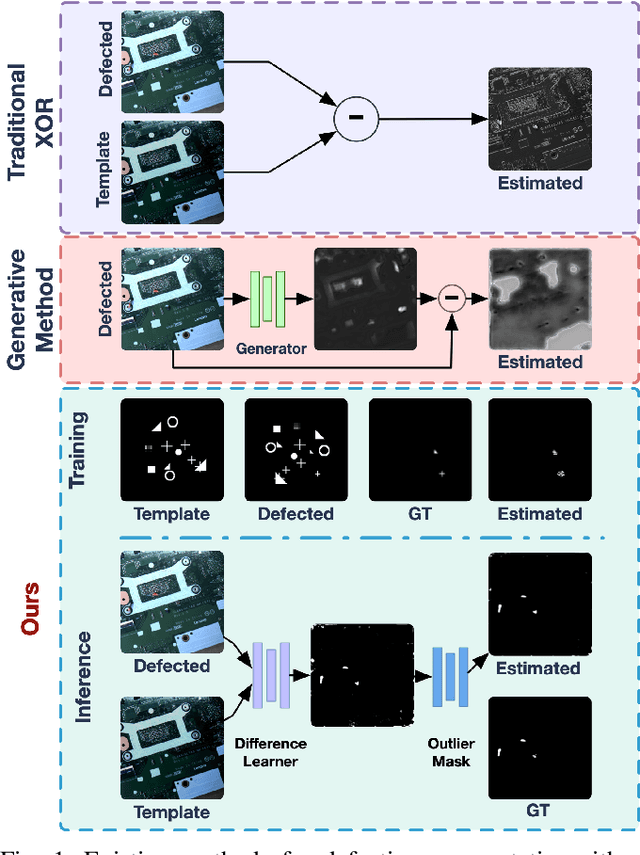
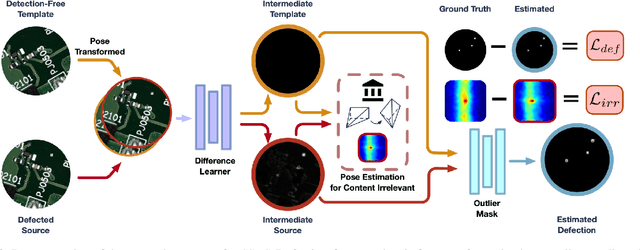
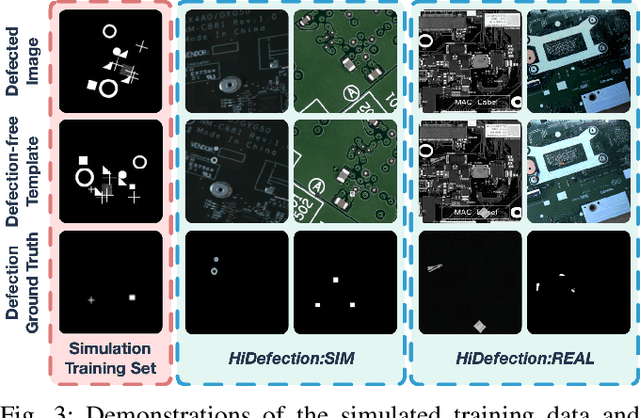
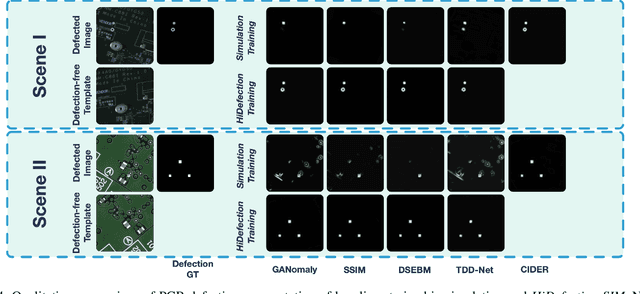
Recent studies on deep-learning-based small defection segmentation approaches are trained in specific settings and tend to be limited by fixed context. Throughout the training, the network inevitably learns the representation of the background of the training data before figuring out the defection. They underperform in the inference stage once the context changed and can only be solved by training in every new setting. This eventually leads to the limitation in practical robotic applications where contexts keep varying. To cope with this, instead of training a network context by context and hoping it to generalize, why not stop misleading it with any limited context and start training it with pure simulation? In this paper, we propose the network SSDS that learns a way of distinguishing small defections between two images regardless of the context, so that the network can be trained once for all. A small defection detection layer utilizing the pose sensitivity of phase correlation between images is introduced and is followed by an outlier masking layer. The network is trained on randomly generated simulated data with simple shapes and is generalized across the real world. Finally, SSDS is validated on real-world collected data and demonstrates the ability that even when trained in cheap simulation, SSDS can still find small defections in the real world showing the effectiveness and its potential for practical applications.
Collaborative Recognition of Feasible region with Aerial and Ground Robots through DPCN
Mar 01, 2021
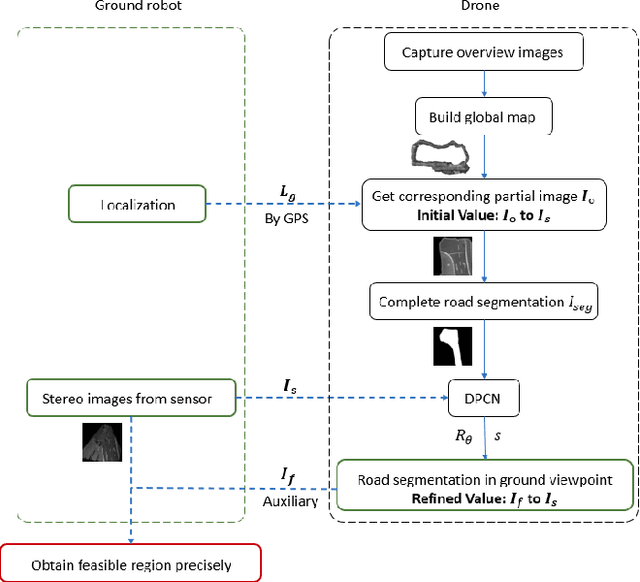
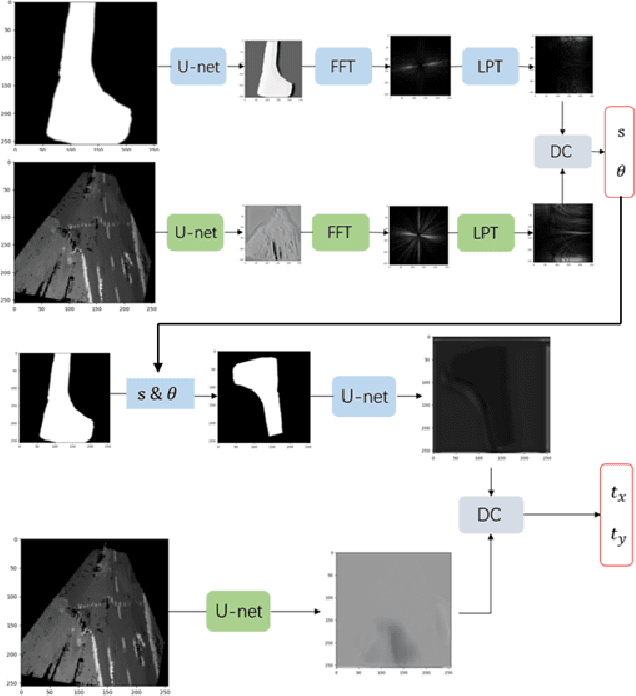
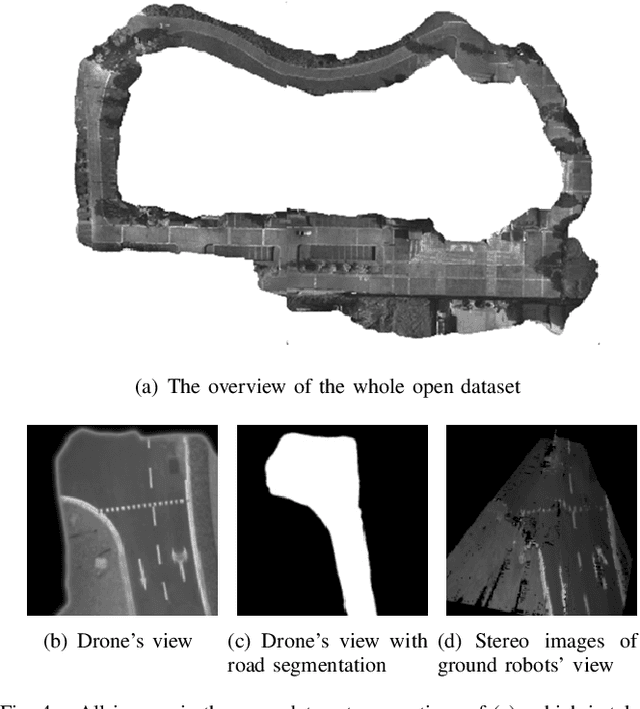
Ground robots always get collision in that only if they get close to the obstacles, can they sense the danger and take actions, which is usually too late to avoid the crash, causing severe damage to the robots. To address this issue, we present collaboration of aerial and ground robots in recognition of feasible region. Taking the aerial robots' advantages of having large scale variance of view points of the same route which the ground robots is on, the collaboration work provides global information of road segmentation for the ground robot, thus enabling it to obtain feasible region and adjust its pose ahead of time. Under normal circumstance, the transformation between these two devices can be obtained by GPS yet with much error, directly causing inferior influence on recognition of feasible region. Thereby, we utilize the state-of-the-art research achievements in matching heterogeneous sensor measurements called deep phase correlation network(DPCN), which has excellent performance on heterogeneous mapping, to refine the transformation. The network is light-weighted and promising for better generalization. We use Aero-Ground dataset which consists of heterogeneous sensor images and aerial road segmentation images. The results show that our collaborative system has great accuracy, speed and stability.
Multi-agent Collaboration for Feasible Collaborative Behavior Construction and Evaluation
Sep 30, 2019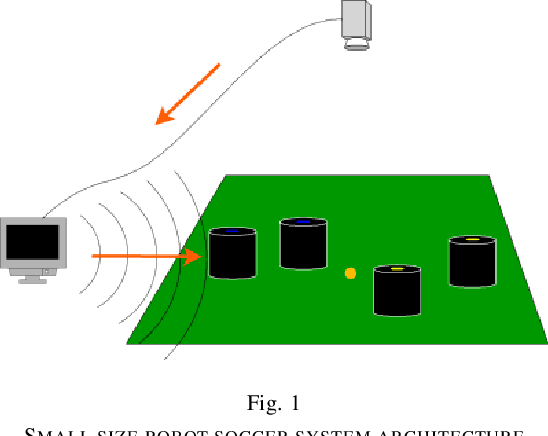
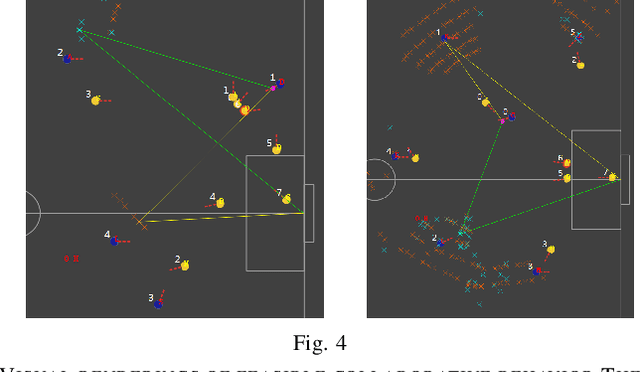
In the case of the two-person zero-sum stochastic game with a central controller, this paper proposes a best collaborative behavior search and selection algorithm based on reinforcement learning, in response to how to choose the best collaborative object and action for the central controller. In view of the existing multi-agent collaboration and confrontation reinforcement learning methods, the methods of traversing all actions in a certain state leads to the problem of long calculation time and unsafe policy exploration. This paper proposes to construct a feasible collaborative behavior set by using action space discretization, establishing models of both sides, model-based prediction and parallel search. Then, we use the deep q-learning method in reinforcement learning to train the scoring function to select the optimal collaboration behavior from the feasible collaborative behavior set. This method enables efficient and accurate calculation in an environment with strong confrontation, high dynamics and a large number of agents, which is verified by the RoboCup Small Size League robots passing collaboration.
Champion Team Paper: Dynamic Passing-Shooting Algorithm Based on CUDA of The RoboCup SSL 2019 Champion
Sep 17, 2019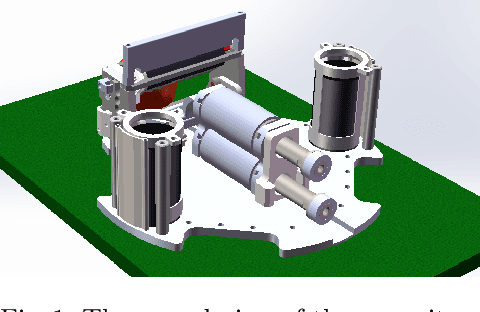
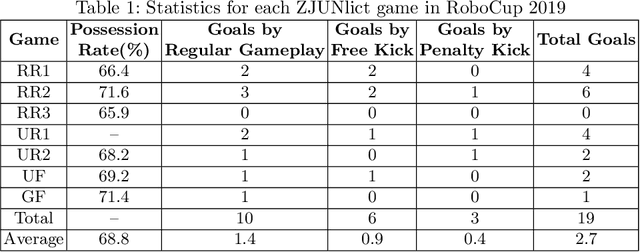
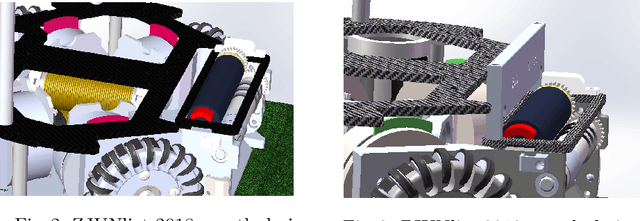
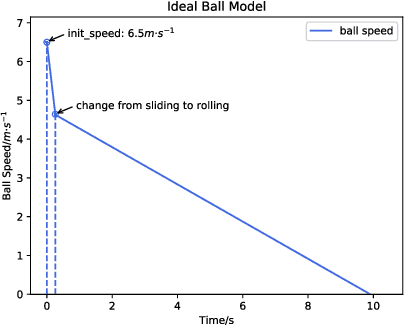
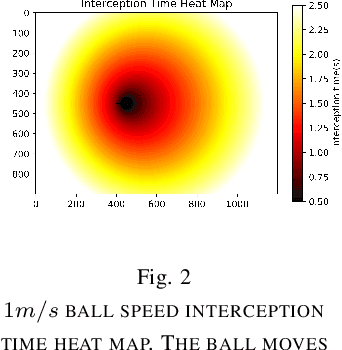
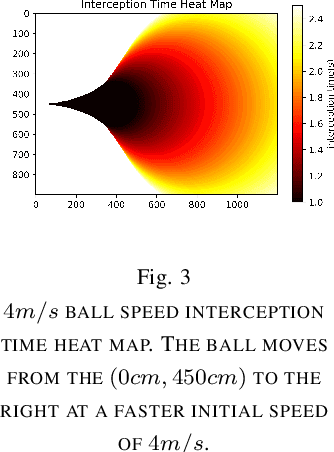
ZJUNlict became the Small Size League Champion of RoboCup 2019 with 6 victories and 1 tie for their 7 games. The overwhelming ability of ball-handling and passing allows ZJUNlict to greatly threaten its opponent and almost kept its goal clear without being threatened. This paper presents the core technology of its ball-handling and robot movement which consist of hardware optimization, dynamic passing and shooting strategy, and multi-agent cooperation and formation. We first describe the mechanical optimization on the placement of the capacitors, the redesign of the damping system of the dribbler and the electrical optimization on the replacement of the core chip. We then describe our passing point algorithm. The passing and shooting strategy can be separated into two different parts, where we search the passing point on SBIP-DPPS and evaluate the point based on the ball model. The statements and the conclusion should be supported by the performances and log of games on Small Size League RoboCup 2019.
Mechatronic Design of a Dribbling System for RoboCup Small Size Robot
May 24, 2019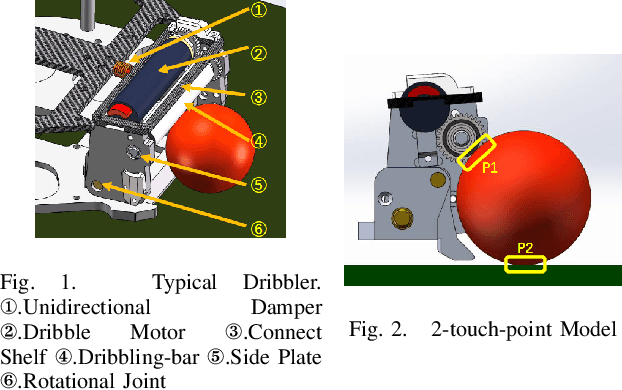
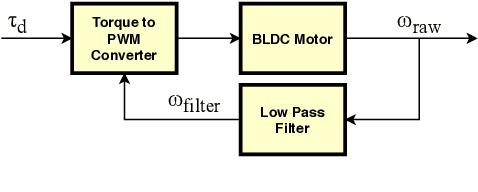
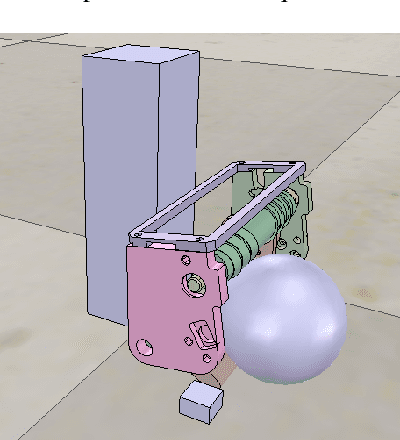
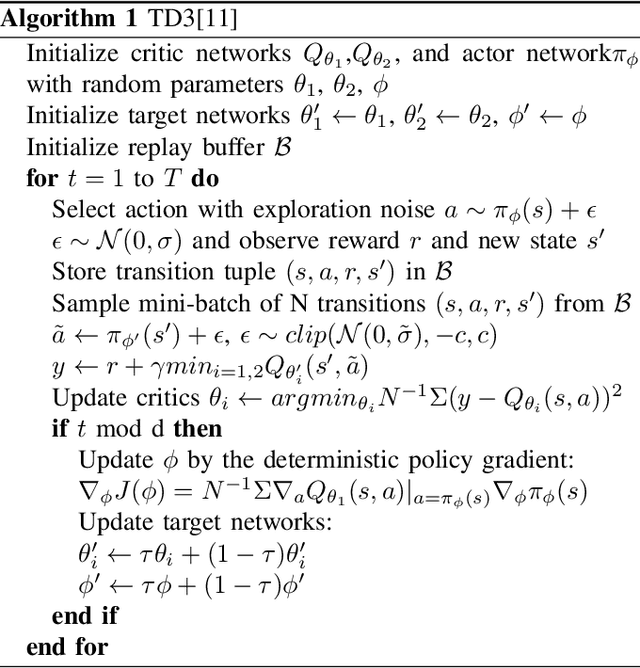
RoboCup SSL is an excellent platform for researching artificial intelligence and robotics. The dribbling system is an essential issue, which is the main part for completing advanced soccer skills such as trapping and dribbling. In this paper, we designed a new dribbling system for SSL robots, including mechatronics design and control algorithms. For the mechatronics design, we analysed and exposed the 3-touch-point model with the simulation in ADAMS. In the motor controller algorithm, we use reinforcement learning to control the torque output. Finally we verified the results on the robot.
ZJUNlict Extended Team Description Paper for RoboCup 2019
May 22, 2019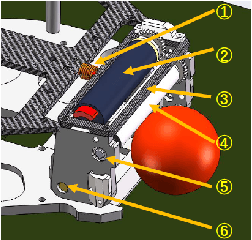

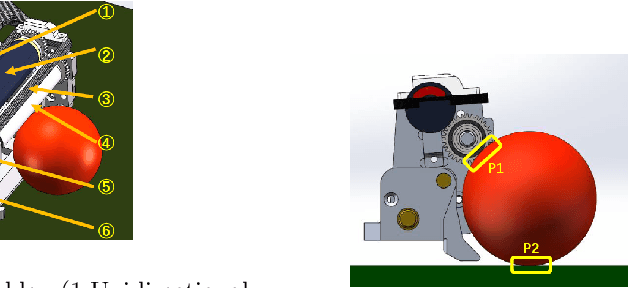
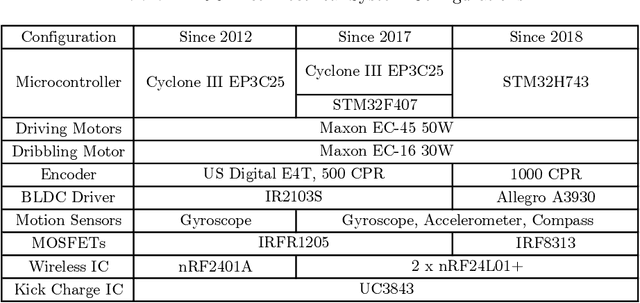
For the Small Size League of RoboCup 2018, Team ZJUNLict has won the champion and therefore, this paper thoroughly described the devotion which ZJUNLict has devoted and the effort that ZJUNLict has contributed. There are three mean optimizations for the mechanical part which accounted for most of our incredible goals, they are "Touching Point Optimization", "Damping System Optimization", and "Dribbler Optimization". For the electrical part, we realized "Direct Torque Control", "Efficient Radio Communication Protocol" which will be credited for stabilizing the dribbler and a more secure communication between robots and the computer. Our software group contributed as much as our hardware group with the effort of "Vision Lost Compensation" to predict the movement by kalman filter, and "Interception Prediction Algorithm" to achieve some skills and improve our ball possession rate.