Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMechatronic Design of a Dribbling System for RoboCup Small Size Robot
Paper and Code
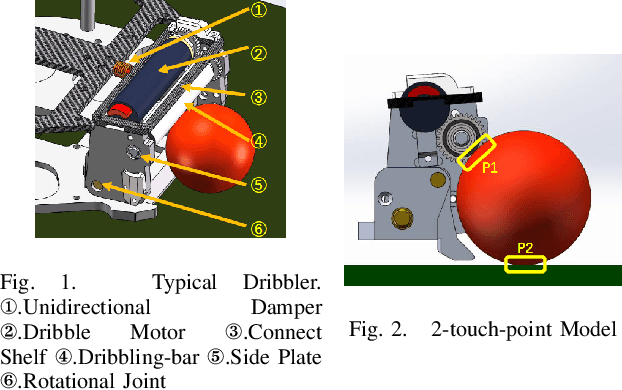
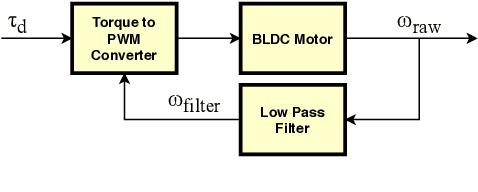
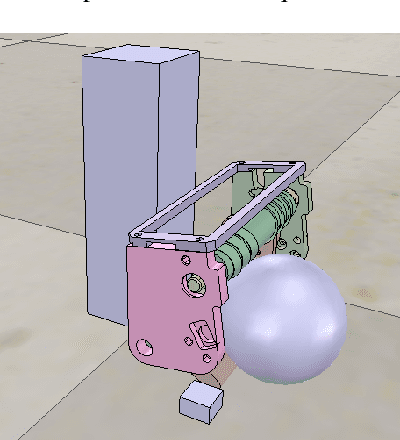
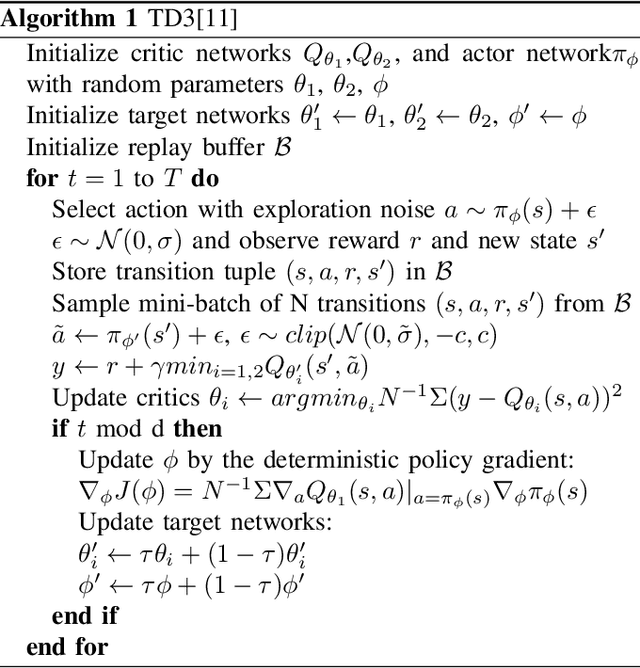
RoboCup SSL is an excellent platform for researching artificial intelligence and robotics. The dribbling system is an essential issue, which is the main part for completing advanced soccer skills such as trapping and dribbling. In this paper, we designed a new dribbling system for SSL robots, including mechatronics design and control algorithms. For the mechatronics design, we analysed and exposed the 3-touch-point model with the simulation in ADAMS. In the motor controller algorithm, we use reinforcement learning to control the torque output. Finally we verified the results on the robot.
* RCAR 2019. arXiv admin note: substantial text overlap with
arXiv:1905.09157
View paper on