 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZJUNlict Extended Team Description Paper for RoboCup 2019
Paper and Code
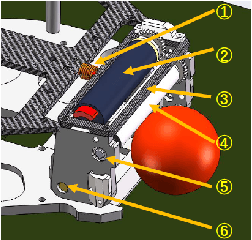

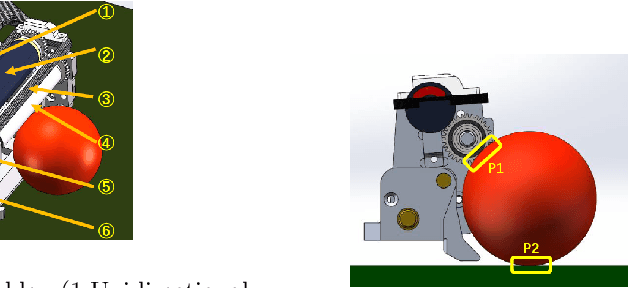
For the Small Size League of RoboCup 2018, Team ZJUNLict has won the champion and therefore, this paper thoroughly described the devotion which ZJUNLict has devoted and the effort that ZJUNLict has contributed. There are three mean optimizations for the mechanical part which accounted for most of our incredible goals, they are "Touching Point Optimization", "Damping System Optimization", and "Dribbler Optimization". For the electrical part, we realized "Direct Torque Control", "Efficient Radio Communication Protocol" which will be credited for stabilizing the dribbler and a more secure communication between robots and the computer. Our software group contributed as much as our hardware group with the effort of "Vision Lost Compensation" to predict the movement by kalman filter, and "Interception Prediction Algorithm" to achieve some skills and improve our ball possession rate.