 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDFPF-Net: Dynamically Focused Progressive Fusion Network for Remote Sensing Change Detection
Mar 10, 2026Change detection (CD) has extensive applications and is a crucial method for identifying and localizing target changes. In recent years, various CD methods represented by convolutional neural network (CNN) and transformer have achieved significant success in effectively detecting difference areas in bi-temporal remote sensing images. However, CNN still exhibit limitations in local feature extraction when confronted with pseudo changes caused by different object types across global scales. Although transformers can effectively detect true change regions due to their long-range dependencies, the shadows cast by buildings under varying lighting conditions can introduce localized noise in these areas. To address these challenges, we propose the dynamically focused progressive fusion network (DFPF-Net) to simultaneously tackle global and local noise influences. On one hand, we utilize a pyramid vision transformer (PVT) as a weight-shared siamese network to implement change detection, efficiently fusing multi-level features extracted from the pyramid structure through a residual based progressive enhanced fusion module (PEFM). On the other hand, we propose the dynamic change focus module (DCFM), which employs attention mechanisms and edge detection algorithms to mitigate noise interference across varying ranges. Extensive experiments on four datasets demonstrate that DFPF-Net outperforms mainstream CD methods.
A Knowledge-Informed Deep Learning Paradigm for Generalizable and Stability-Optimized Car-Following Models
Apr 19, 2025



Car-following models (CFMs) are fundamental to traffic flow analysis and autonomous driving. Although calibrated physics-based and trained data-driven CFMs can replicate human driving behavior, their reliance on specific datasets limits generalization across diverse scenarios and reduces reliability in real-world deployment. Moreover, these models typically focus on behavioral fidelity and do not support the explicit optimization of local and string stability, which are increasingly important for the safe and efficient operation of autonomous vehicles (AVs). To address these limitations, we propose a Knowledge-Informed Deep Learning (KIDL) paradigm that distills the generalization capabilities of pre-trained Large Language Models (LLMs) into a lightweight and stability-aware neural architecture. LLMs are used to extract fundamental car-following knowledge beyond dataset-specific patterns, and this knowledge is transferred to a reliable, tractable, and computationally efficient model through knowledge distillation. KIDL also incorporates stability constraints directly into its training objective, ensuring that the resulting model not only emulates human-like behavior but also satisfies the local and string stability requirements essential for real-world AV deployment. We evaluate KIDL on the real-world NGSIM and HighD datasets, comparing its performance with representative physics-based, data-driven, and hybrid CFMs. Both empirical and theoretical results consistently demonstrate KIDL's superior behavioral generalization and traffic flow stability, offering a robust and scalable solution for next-generation traffic systems.
Adaptive Constraint Partition based Optimization Framework for Large-scale Integer Linear Programming(Student Abstract)
Nov 18, 2022
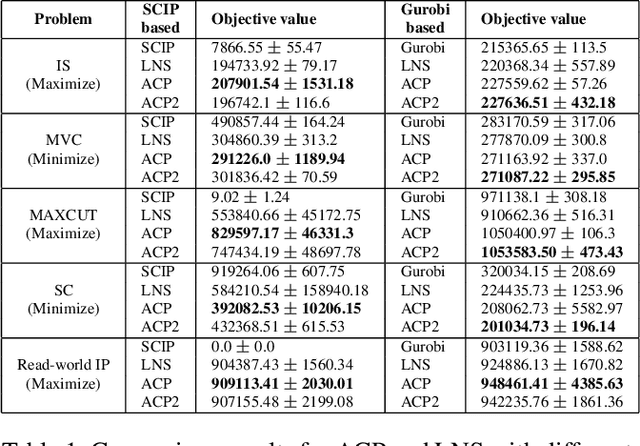

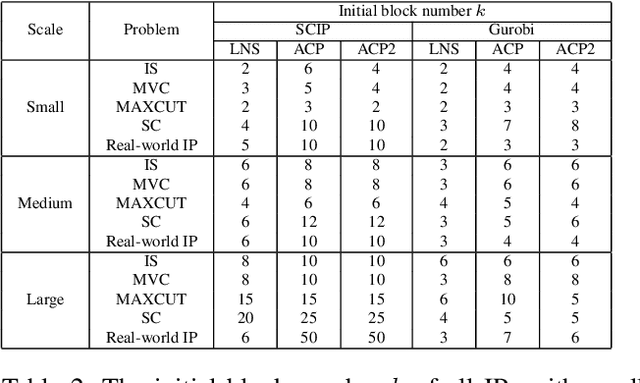
Integer programming problems (IPs) are challenging to be solved efficiently due to the NP-hardness, especially for large-scale IPs. To solve this type of IPs, Large neighborhood search (LNS) uses an initial feasible solution and iteratively improves it by searching a large neighborhood around the current solution. However, LNS easily steps into local optima and ignores the correlation between variables to be optimized, leading to compromised performance. This paper presents a general adaptive constraint partition-based optimization framework (ACP) for large-scale IPs that can efficiently use any existing optimization solver as a subroutine. Specifically, ACP first randomly partitions the constraints into blocks, where the number of blocks is adaptively adjusted to avoid local optima. Then, ACP uses a subroutine solver to optimize the decision variables in a randomly selected block of constraints to enhance the variable correlation. ACP is compared with LNS framework with different subroutine solvers on four IPs and a real-world IP. The experimental results demonstrate that in specified wall-clock time ACP shows better performance than SCIP and Gurobi.
Commonsense Knowledge Salience Evaluation with a Benchmark Dataset in E-commerce
May 22, 2022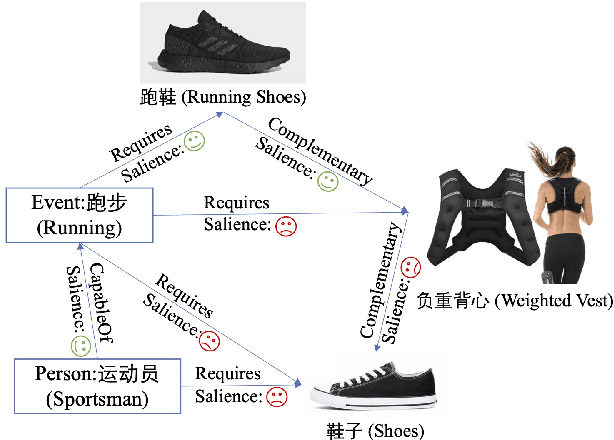
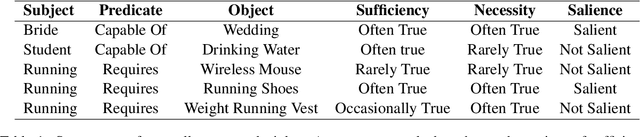
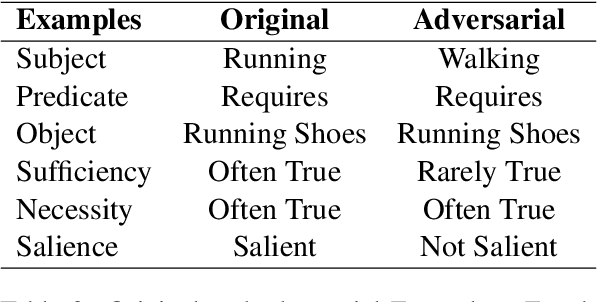
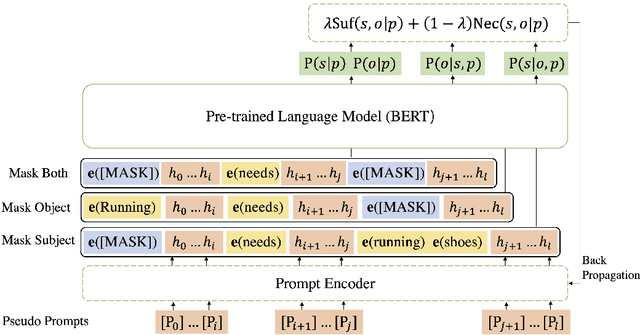
In e-commerce, the salience of commonsense knowledge (CSK) is beneficial for widespread applications such as product search and recommendation. For example, when users search for "running" in e-commerce, they would like to find items highly related to running, such as "running shoes" rather than "shoes". However, many existing CSK collections rank statements solely by confidence scores, and there is no information about which ones are salient from a human perspective. In this work, we define the task of supervised salience evaluation, where given a CSK triple, the model is required to learn whether the triple is salient or not. In addition to formulating the new task, we also release a new Benchmark dataset of Salience Evaluation in E-commerce (BSEE) and hope to promote related research on commonsense knowledge salience evaluation. We conduct experiments in the dataset with several representative baseline models. The experimental results show that salience evaluation is a hard task where models perform poorly on our evaluation set. We further propose a simple but effective approach, PMI-tuning, which shows promise for solving this novel problem.
Knowledge Association with Hyperbolic Knowledge Graph Embeddings
Oct 05, 2020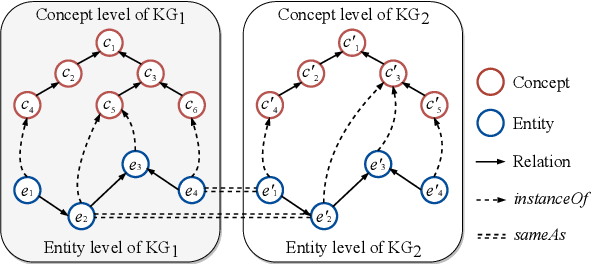
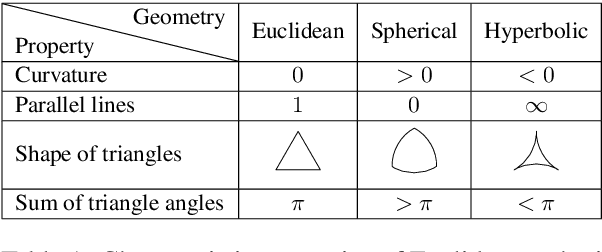
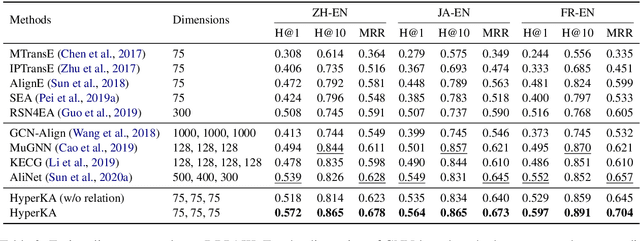
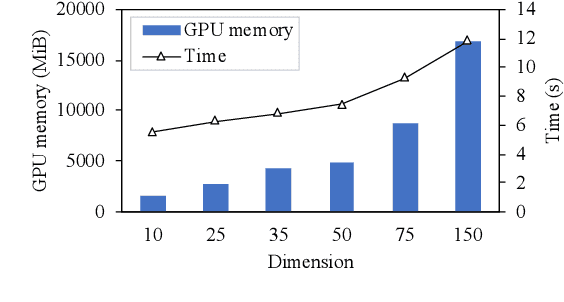
Capturing associations for knowledge graphs (KGs) through entity alignment, entity type inference and other related tasks benefits NLP applications with comprehensive knowledge representations. Recent related methods built on Euclidean embeddings are challenged by the hierarchical structures and different scales of KGs. They also depend on high embedding dimensions to realize enough expressiveness. Differently, we explore with low-dimensional hyperbolic embeddings for knowledge association. We propose a hyperbolic relational graph neural network for KG embedding and capture knowledge associations with a hyperbolic transformation. Extensive experiments on entity alignment and type inference demonstrate the effectiveness and efficiency of our method.
A Benchmarking Study of Embedding-based Entity Alignment for Knowledge Graphs
Mar 10, 2020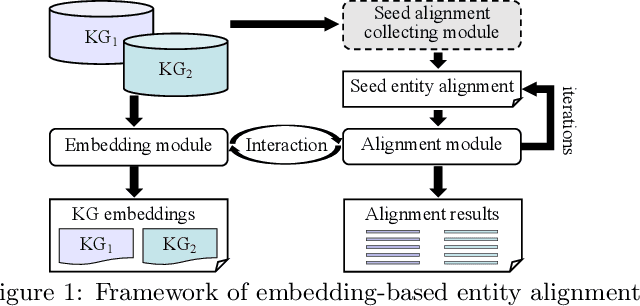
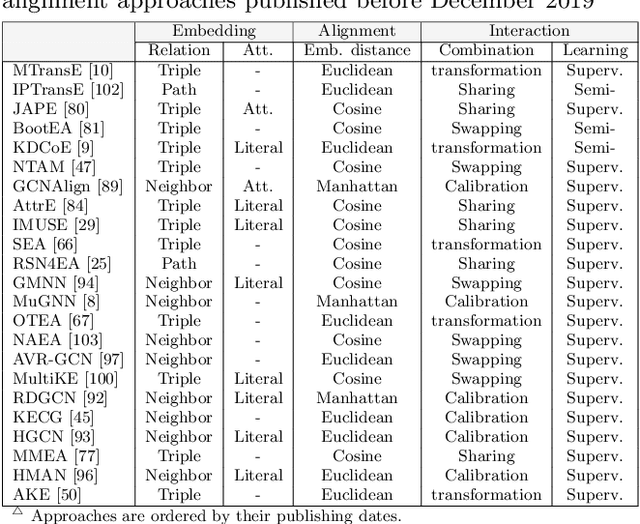
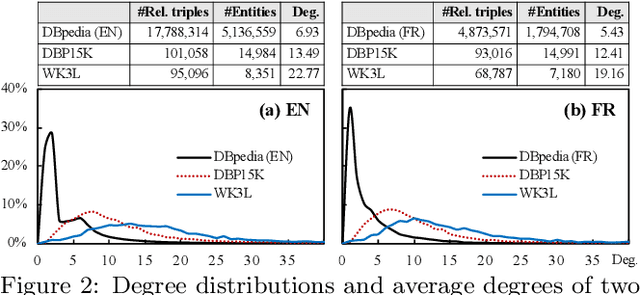
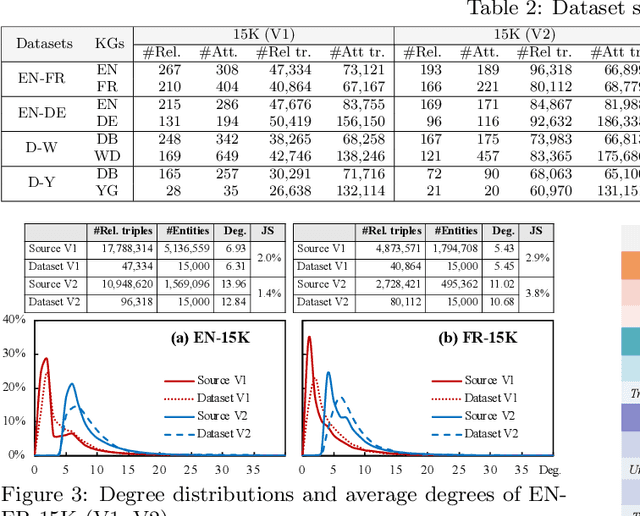
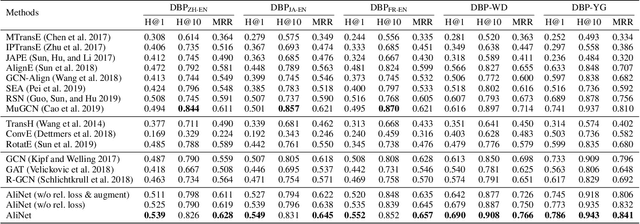
Entity alignment seeks to find entities in different knowledge graphs (KGs) that refer to the same real-world object. Recent advancement in KG embedding impels the advent of embedding-based entity alignment, which encodes entities in a continuous embedding space and measures entity similarities based on the learned embeddings. In this paper, we conduct a comprehensive experimental study of this emerging field. This study surveys 23 recent embedding-based entity alignment approaches and categorizes them based on their techniques and characteristics. We further observe that current approaches use different datasets in evaluation, and the degree distributions of entities in these datasets are inconsistent with real KGs. Hence, we propose a new KG sampling algorithm, with which we generate a set of dedicated benchmark datasets with various heterogeneity and distributions for a realistic evaluation. This study also produces an open-source library, which includes 12 representative embedding-based entity alignment approaches. We extensively evaluate these approaches on the generated datasets, to understand their strengths and limitations. Additionally, for several directions that have not been explored in current approaches, we perform exploratory experiments and report our preliminary findings for future studies. The benchmark datasets, open-source library and experimental results are all accessible online and will be duly maintained.
Knowledge Graph Alignment Network with Gated Multi-hop Neighborhood Aggregation
Nov 20, 2019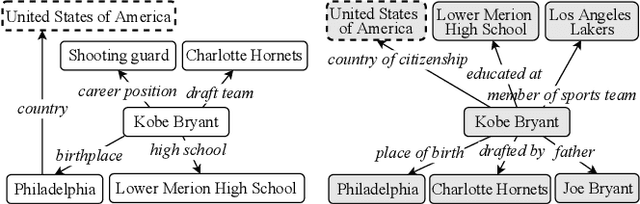

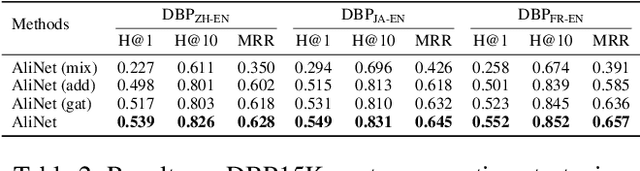
Graph neural networks (GNNs) have emerged as a powerful paradigm for embedding-based entity alignment due to their capability of identifying isomorphic subgraphs. However, in real knowledge graphs (KGs), the counterpart entities usually have non-isomorphic neighborhood structures, which easily causes GNNs to yield different representations for them. To tackle this problem, we propose a new KG alignment network, namely AliNet, aiming at mitigating the non-isomorphism of neighborhood structures in an end-to-end manner. As the direct neighbors of counterpart entities are usually dissimilar due to the schema heterogeneity, AliNet introduces distant neighbors to expand the overlap between their neighborhood structures. It employs an attention mechanism to highlight helpful distant neighbors and reduce noises. Then, it controls the aggregation of both direct and distant neighborhood information using a gating mechanism. We further propose a relation loss to refine entity representations. We perform thorough experiments with detailed ablation studies and analyses on five entity alignment datasets, demonstrating the effectiveness of AliNet.