 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Explore Indoor Environments using Autonomous Micro Aerial Vehicles
Sep 13, 2023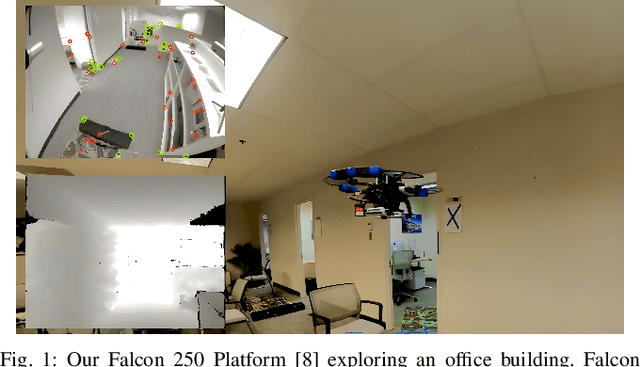

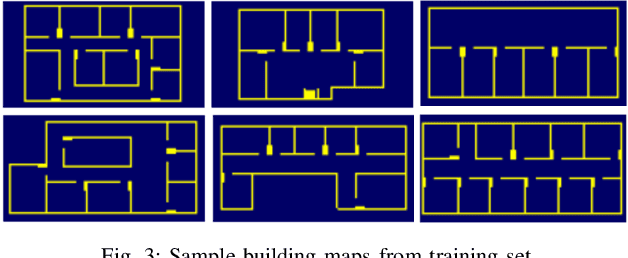
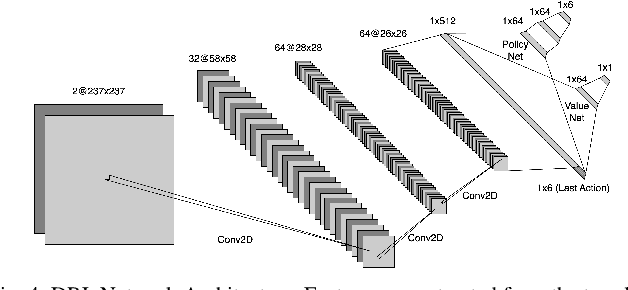
In this paper, we address the challenge of exploring unknown indoor aerial environments using autonomous aerial robots with Size Weight and Power (SWaP) constraints. The SWaP constraints induce limits on mission time requiring efficiency in exploration. We present a novel exploration framework that uses Deep Learning (DL) to predict the most likely indoor map given the previous observations, and Deep Reinforcement Learning (DRL) for exploration, designed to run on modern SWaP constraints neural processors. The DL-based map predictor provides a prediction of the occupancy of the unseen environment while the DRL-based planner determines the best navigation goals that can be safely reached to provide the most information. The two modules are tightly coupled and run onboard allowing the vehicle to safely map an unknown environment. Extensive experimental and simulation results show that our approach surpasses state-of-the-art methods by 50-60% in efficiency, which we measure by the fraction of the explored space as a function of the length of the trajectory traveled.
Place Recognition in Forests with Urquhart Tessellations
Sep 23, 2020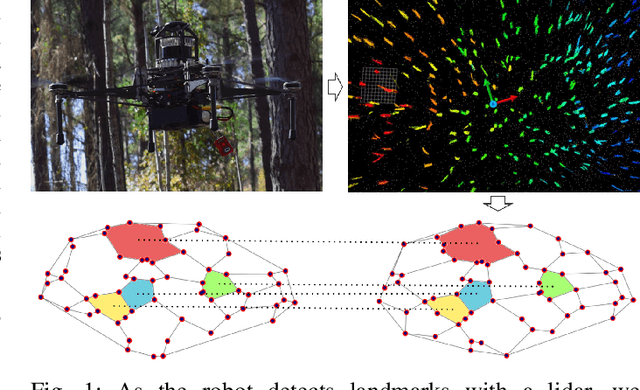
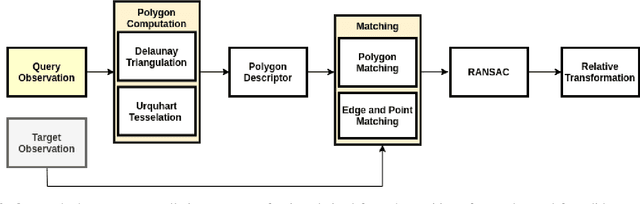
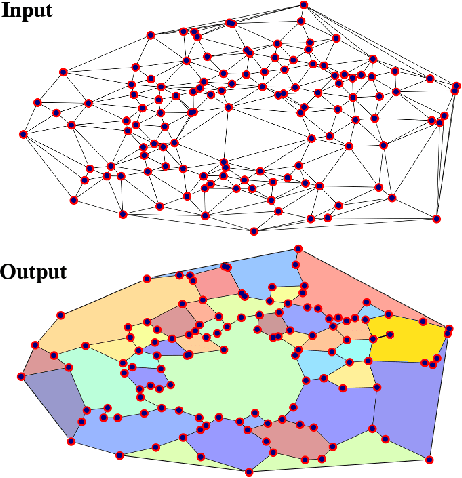
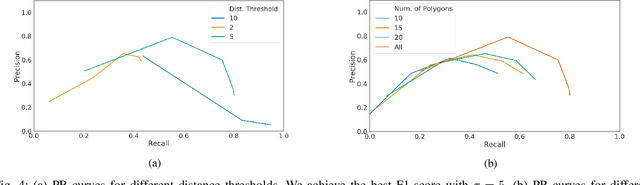
In this letter we present a novel descriptor based on polygons derived from Urquhart tessellations on the position of trees in a forest detected from lidar scans. We present a framework that leverages these polygons to generate a signature that is used detect previously seen observations even with partial overlap and different levels of noise while also inferring landmark correspondences to compute an affine transformation between observations. We run loop-closure experiments in simulation and real-world data map-merging from different flights of an Unmanned Aerial Vehicle (UAV) in a pine tree forest and show that our method outperforms state-of-the-art approaches in accuracy and robustness.
Mine Tunnel Exploration using Multiple Quadrupedal Robots
Sep 20, 2019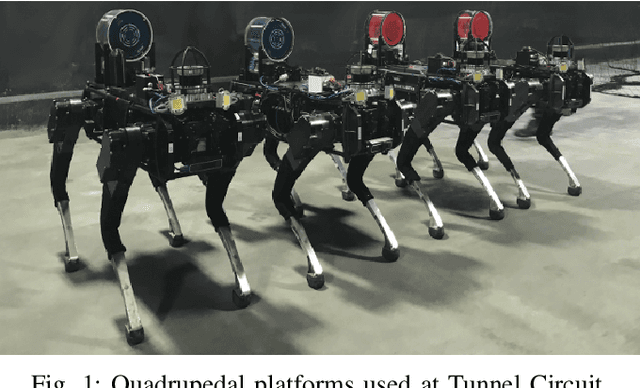
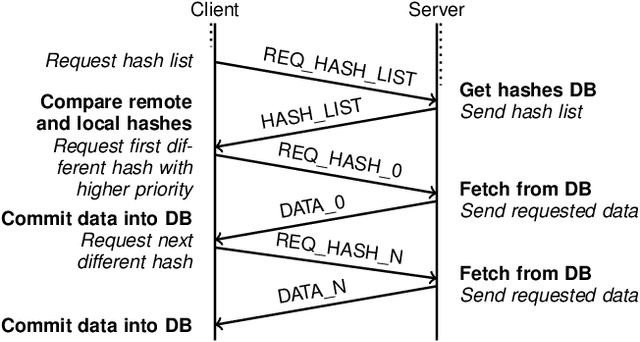
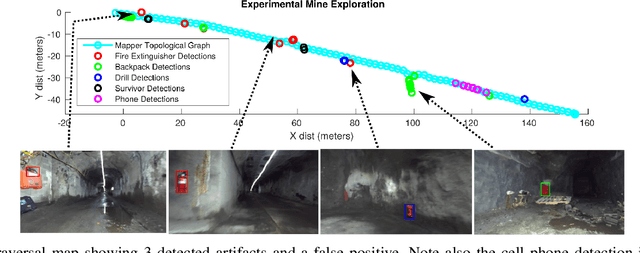
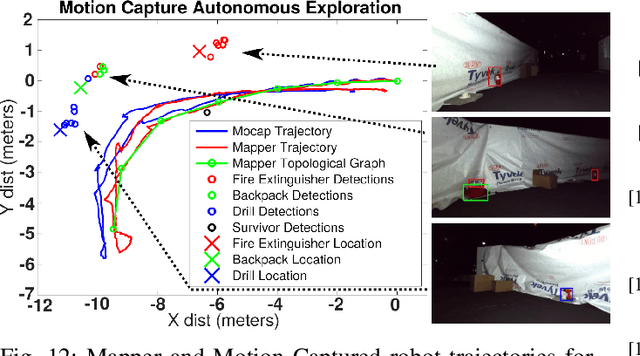
Robotic exploration of underground environments is a particularly challenging problem due to communication, endurance, and traversability constraints which necessitate high degrees of autonomy and agility. These challenges are further enhanced by the need to minimize human intervention for practical applications. While legged robots have the ability to traverse extremely challenging terrain, they also engender further inherent challenges for planning, estimation, and control. In this work, we describe a fully autonomous system for multi-robot mine exploration and mapping using legged quadrupeds, as well as a distributed database mesh networking system for reporting data. In addition, we show results from the DARPA Subterranean Challenge (SubT) Tunnel Circuit demonstrating localization of artifacts after traversals of hundreds of meters. To our knowledge, these experiments represent the first fully autonomous exploration of an unknown GNSS-denied environment undertaken by legged robots.