 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMine Tunnel Exploration using Multiple Quadrupedal Robots
Sep 20, 2019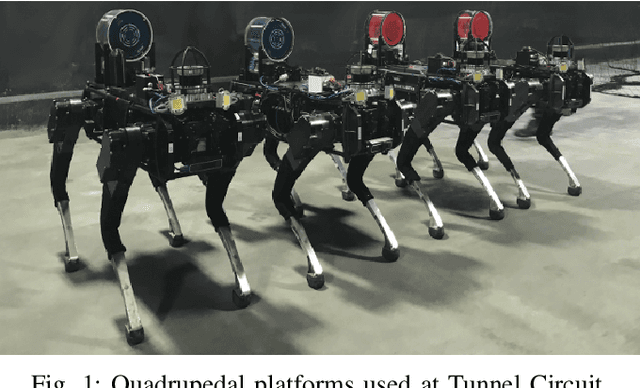
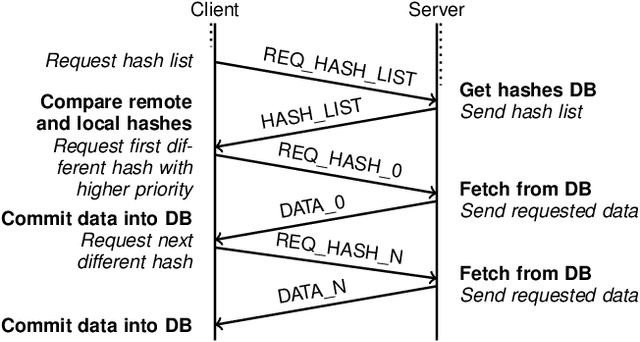
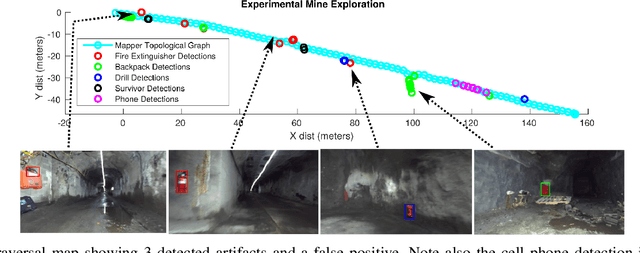
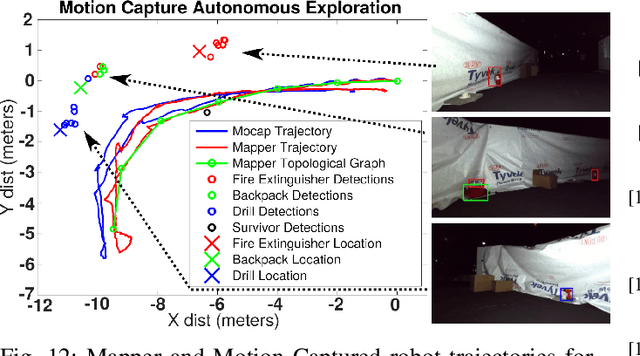
Robotic exploration of underground environments is a particularly challenging problem due to communication, endurance, and traversability constraints which necessitate high degrees of autonomy and agility. These challenges are further enhanced by the need to minimize human intervention for practical applications. While legged robots have the ability to traverse extremely challenging terrain, they also engender further inherent challenges for planning, estimation, and control. In this work, we describe a fully autonomous system for multi-robot mine exploration and mapping using legged quadrupeds, as well as a distributed database mesh networking system for reporting data. In addition, we show results from the DARPA Subterranean Challenge (SubT) Tunnel Circuit demonstrating localization of artifacts after traversals of hundreds of meters. To our knowledge, these experiments represent the first fully autonomous exploration of an unknown GNSS-denied environment undertaken by legged robots.
PST900: RGB-Thermal Calibration, Dataset and Segmentation Network
Sep 20, 2019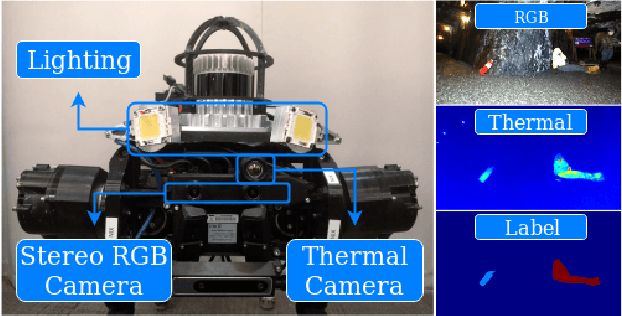
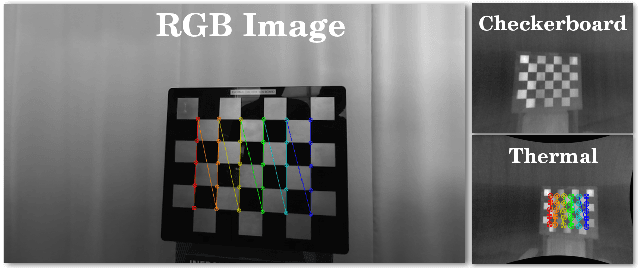
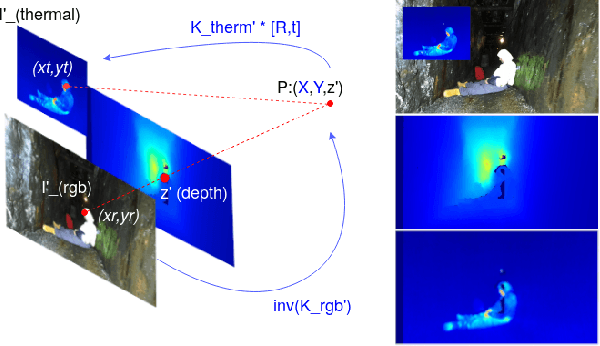
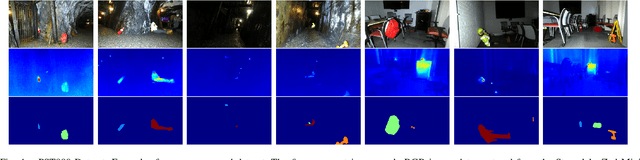
In this work we propose long wave infrared (LWIR) imagery as a viable supporting modality for semantic segmentation using learning-based techniques. We first address the problem of RGB-thermal camera calibration by proposing a passive calibration target and procedure that is both portable and easy to use. Second, we present PST900, a dataset of 894 synchronized and calibrated RGB and Thermal image pairs with per pixel human annotations across four distinct classes from the DARPA Subterranean Challenge. Lastly, we propose a CNN architecture for fast semantic segmentation that combines both RGB and Thermal imagery in a way that leverages RGB imagery independently. We compare our method against the state-of-the-art and show that our method outperforms them in our dataset.