 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAny Way You Look At It: Semantic Crossview Localization and Mapping with LiDAR
Mar 16, 2022
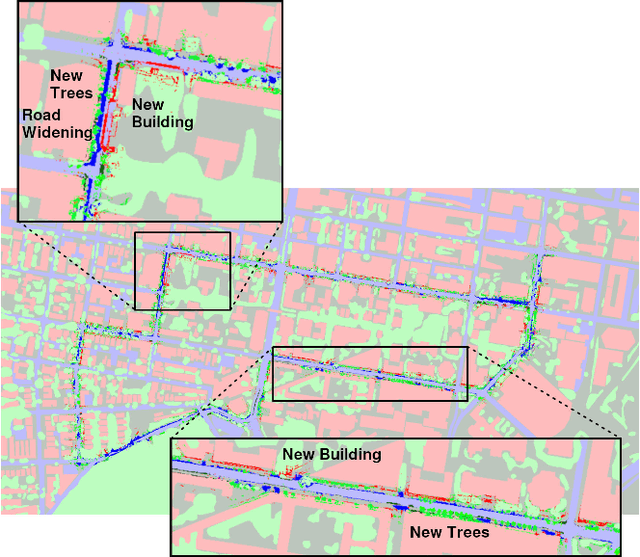
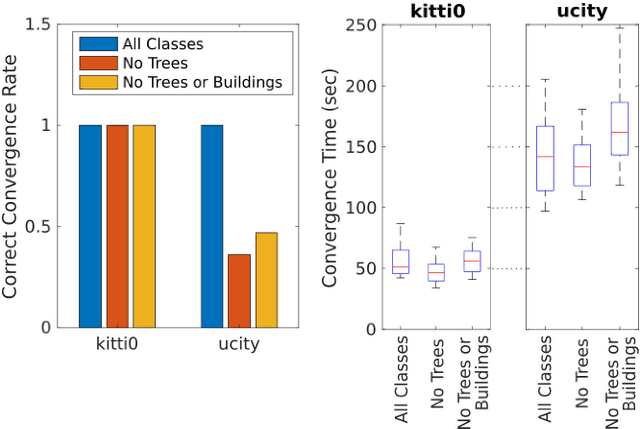
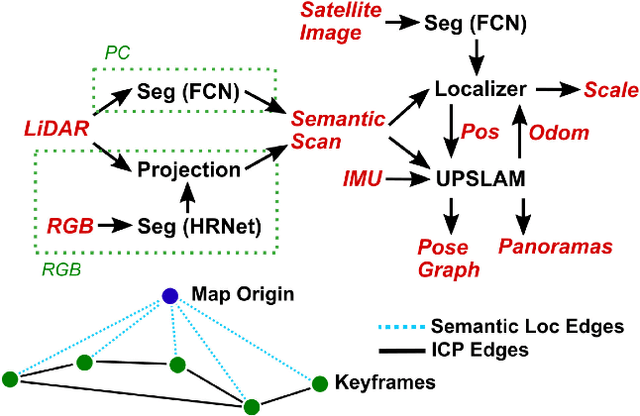
Currently, GPS is by far the most popular global localization method. However, it is not always reliable or accurate in all environments. SLAM methods enable local state estimation but provide no means of registering the local map to a global one, which can be important for inter-robot collaboration or human interaction. In this work, we present a real-time method for utilizing semantics to globally localize a robot using only egocentric 3D semantically labelled LiDAR and IMU as well as top-down RGB images obtained from satellites or aerial robots. Additionally, as it runs, our method builds a globally registered, semantic map of the environment. We validate our method on KITTI as well as our own challenging datasets, and show better than 10 meter accuracy, a high degree of robustness, and the ability to estimate the scale of a top-down map on the fly if it is initially unknown.
* Published in the IEEE Robotics and Automation Letters and presented at the IEEE 2021 International Conference on Robotics and Automation. See https://www.youtube.com/watch?v=_qwAoYK9iGU for accompanying video
UPSLAM: Union of Panoramas SLAM
Jan 03, 2021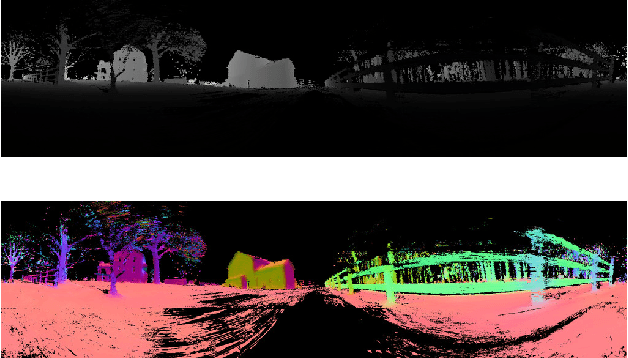
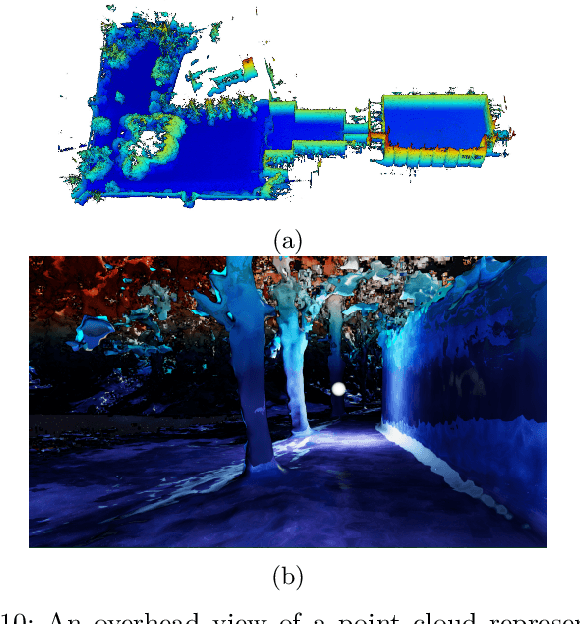
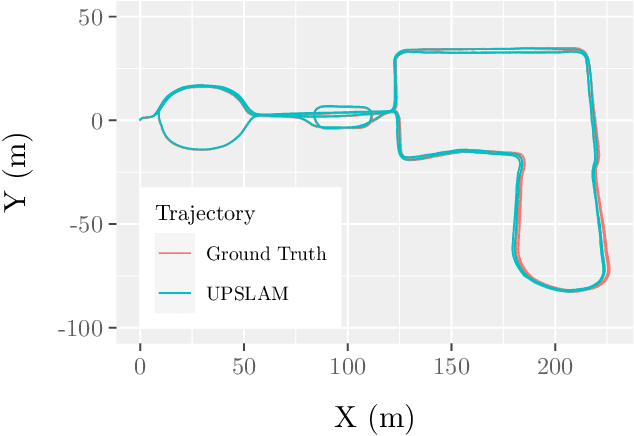
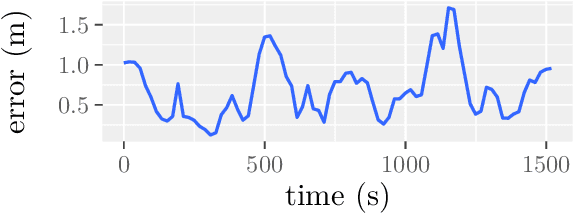
We present an empirical investigation of a new mapping system based on a graph of panoramic depth images. Panoramic images efficiently capture range measurements taken by a spinning lidar sensor, recording fine detail on the order of a few centimeters within maps of expansive scope on the order of tens of millions of cubic meters. The flexibility of the system is demonstrated by running the same mapping software against data collected by hand-carrying a sensor around a laboratory space at walking pace, moving it outdoors through a campus environment at running pace, driving the sensor on a small wheeled vehicle on- and off-road, flying the sensor through a forest, carrying it on the back of a legged robot navigating an underground coal mine, and mounting it on the roof of a car driven on public roads. The full 3D maps are built online with a median update time of less than ten milliseconds on an embedded NVIDIA Jetson AGX Xavier system.
Mine Tunnel Exploration using Multiple Quadrupedal Robots
Sep 20, 2019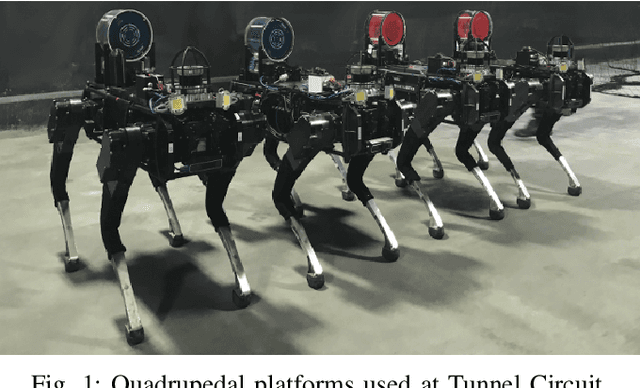
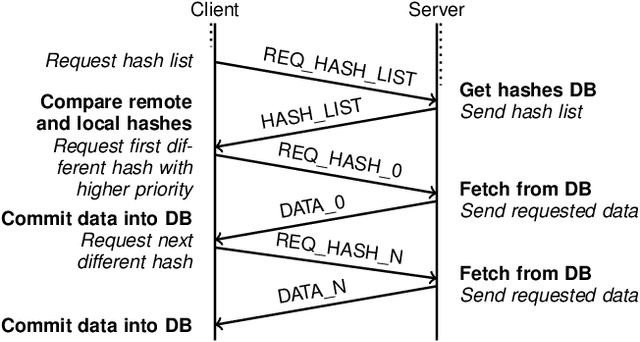
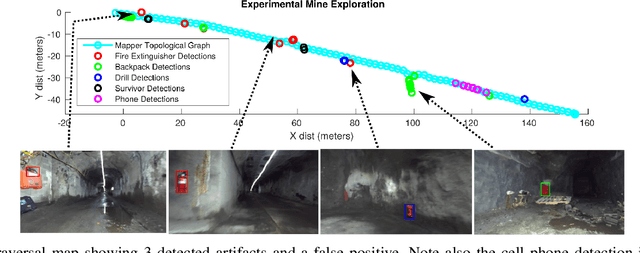
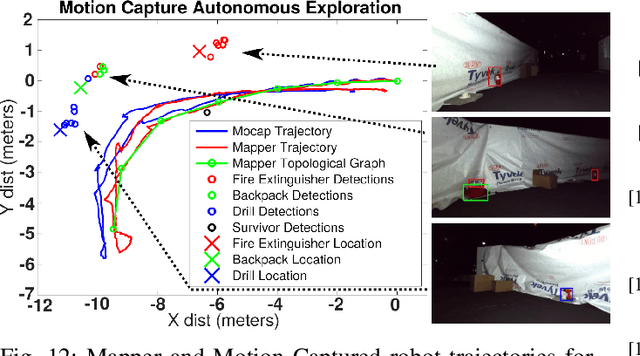
Robotic exploration of underground environments is a particularly challenging problem due to communication, endurance, and traversability constraints which necessitate high degrees of autonomy and agility. These challenges are further enhanced by the need to minimize human intervention for practical applications. While legged robots have the ability to traverse extremely challenging terrain, they also engender further inherent challenges for planning, estimation, and control. In this work, we describe a fully autonomous system for multi-robot mine exploration and mapping using legged quadrupeds, as well as a distributed database mesh networking system for reporting data. In addition, we show results from the DARPA Subterranean Challenge (SubT) Tunnel Circuit demonstrating localization of artifacts after traversals of hundreds of meters. To our knowledge, these experiments represent the first fully autonomous exploration of an unknown GNSS-denied environment undertaken by legged robots.