 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards End to End Motion Planning and Execution for Autonomous Underwater Vehicles Using Reinforcement Learning
Jun 07, 2026Autonomous Underwater Vehicles (AUVs) traditionally rely on complex, heavily engineered pipelines for perception, path planning, and motion control. This paper explores the feasibility of an end-to-end Deep Reinforcement Learning (DRL) approach that maps raw sensor data directly to thruster commands, reducing manual engineering. We propose a hierarchical reinforcement learning (HRL) architecture splitting the problem into two Markov Decision Processes. A High-Level (HL) policy operating at 2Hz processes raw $84 \times 84$ pixel monocular camera frames, stacked $100 \times 100$ pixel forward-looking imaging sonar, and proprioceptive data to generate spatial subgoals. Simultaneously, a Low-Level (LL) policy operating at 10Hz converts these subgoals into thruster commands. The HL policy is trained using Reinforcement Learning from Prior Demonstrations (RLPD) within a modified Sample-Efficient Robotic Reinforcement Learning (SERL) framework, while the LL policy utilizes Soft Actor-Critic (SAC) combined with Hindsight Experience Replay (HER). Evaluated in the high-fidelity HoloOcean simulator, our method demonstrates successful obstacle avoidance, achieving trajectory lengths closely approximating (within 4% to 6% of) an $\text{RRT}^*$ planning baseline. Furthermore, the learned policy exhibits strong robustness to simulated sensor noise and decreased visibility. While the system navigates familiar geometries effectively, experiments reveal generalization limitations when encountering unvisited areas with novel obstacle shapes. Ultimately, this work demonstrates the promise of sample-efficient, end-to-end DRL for underwater navigation using minimal computational hardware.
Decoupled Delay Compensation: Enhancing Pre-trained MARL Policies via Learned Dynamics Filtering
May 25, 2026Real-world multi-agent reinforcement learning (MARL) systems must often operate under stale observations, stochastic communication delays, and intermittent packet loss. Policies trained under idealized synchronous conditions frequently exhibit significant performance degradation in these regimes because they act on outdated feedback. We propose a modular execution-stage state-estimation layer that replaces delayed communicated observations with current belief-state estimates. The framework integrates a learned Gated transition model with a recursive Kalman filtering layer to estimate instantaneous states from asynchronous measurements. A primary advantage of this approach is its modularity, The estimator serves as a plug-in for pre-trained policies, requiring no modifications to the original MARL training algorithm, architecture, or reward structure. Evaluation across diverse multi-agent and continuous-control benchmarks demonstrates that the proposed layer consistently enhances robustness to communication latency and message loss. The most significant performance gains are observed in coordination-intensive and dynamically unstable tasks where temporal consistency is critical for control.
Micro-Swarm Locomotion Optimization in Dynamic Flow using Multi-Objective Multi-Agent Reinforcement Learning
May 24, 2026Coordinating micro-robotic swarms in physiologically realistic, time-dependent fluid environments remains an unsolved challenge for biomedical and environmental applications. We present a hybrid Computational Fluid Dynamics - Multi-Objective Multi-Agent Reinforcement Learning framework that directly couples a high-fidelity incompressible Navier-Stokes solver with decentralized proximal policy optimization to learn physically consistent swarm control strategies in oscillatory flow. Sixteen magnetically actuated micro-robots navigate a pulsatile arterial waveform, simultaneously optimizing upstream progression, energy conservation, and motion smoothness, reconciled using PCGrad surgery. Without PCGrad, energy efficiency and smoothness rewards collapse to near zero within 10,000 training steps while progress exhibits persistent large-amplitude oscillations, confirming that gradient conflict resolution is a structural requirement rather than an optional refinement in this domain. The converged policy achieves a progress reward of 6.5-7.0, a sustained energy efficiency of 0.63-0.65, and near-maximum smoothness (0.97-0.99), representing improvements over brute-force baselines on the primary objective while both baselines yield negative energy efficiency throughout. Training reveals three emergent behavioral phases: a collective two-layer hydrodynamic throttling formation that suppresses peak channel velocities during forward flow, a cycle-synchronized ratchet mechanism that exploits flow reversals for upstream repositioning, and an individualized final approach as agents near the success boundary. These results establish that time-dependent fluid-agent interactions can be captured directly within multi-objective reinforcement learning loops, offering a physically grounded paradigm for micro-swarm control in biomedical navigation, environmental monitoring, and industrial microfluidics.
ARMS: Automatic Reward Shaping for Sparse-Reward Multi-Agent Reinforcement Learning
May 22, 2026Sparse rewards are a major bottleneck in multi-agent reinforcement learning (MARL), where simultaneous learning induces non-stationarity and makes reward design especially delicate. Reward shaping can accelerate learning, but in the multi-agent setting it must preserve the strategic structure of the problem rather than merely improve short-term optimization. We propose Automatic Reward-shaping in Multi-agent Systems (ARMS), a self-supervised reward shaping framework for MARL that learns dense shaping signals from sparse environmental rewards through trajectory ranking. Since single-agent trajectory-ranking guarantees do not directly transfer to MARL, we reformulate policy invariance through conditional best-response reasoning, and show that if certain conditions hold, then using shaping rewards preserves each agent's best-response set under fixed opponent policies, and consequently preserve the set of Nash equilibria. Guided by this perspective, ARMS alternates between policy learning and reward learning while sharing shaping parameters across agents for efficiency. Experiments in a partially observable multi-agent pathfinding domain show that ARMS improves sampling efficiency under increasing reward sparsity and agent count, generalizes to unseen environments, and reveals a MARL-specific failure mode in which limited exploration and coupled policy--reward dynamics induce oscillatory behavior. Increasing exploration mitigates this effect and stabilizes learning. To the best of our knowledge, ARMS is the first automatic reward shaping framework for MARL whose design is motivated by a game-theoretic equilibrium-preservation result.
MOSAIC-Bench: Measuring Compositional Vulnerability Induction in Coding Agents
May 05, 2026Coding agents often pass per-prompt safety review yet ship exploitable code when their tasks are decomposed into routine engineering tickets. The challenge is structural: existing safety alignment evaluates overt requests in isolation, leaving models blind to malicious end-states that emerge from sequenced compliance with innocuous-looking requests. We introduce MOSAIC-Bench (Malicious Objectives Sequenced As Innocuous Compliance), a benchmark of 199 three-stage attack chains paired with deterministic exploit oracles on deployed software substrates (10 web-application substrates, 31 CWE classes, 5 programming languages) that treats both exploit ground truth and downstream reviewer protocol as first-class evaluation axes. On this benchmark, nine production coding agents from Anthropic, OpenAI, Google, Moonshot, Zhipu, and Minimax compose innocuous tickets at 53-86% end-to-end ASR with only two refusals across all staged runs. In a matched direct-prompt experiment over four frontier Claude/Codex agents, vulnerable-output rates fall to 0-20.4%: Claude primarily refuses, while Codex primarily hardens rather than emitting the vulnerable implementation - ticket staging silences both defense modes simultaneously. Downstream, code reviewer agents approve 25.8% of these confirmed-vulnerable cumulative diffs as routine PRs, and a full-context implementation protocol closes only 50% of the staged/direct gap, ruling out context fragmentation as the sole explanation. As a deployable but non-adaptive mitigation, reframing the reviewer as an adversarial pentester reduces evasion across the evaluated reviewer subset; pentester framed evasion ranges from 3.0% to 17.6%, and an open-weight Gemma-4-E4B-it reviewer under this framing detects 88.4% of attacks on the dataset with a 4.6% false-positive rate measured on 608 real-world GitHub PRs.
Semantic Denial of Service in LLM-controlled robots
Apr 25, 2026Safety-oriented instruction-following is supposed to keep LLM-controlled robots safe. We show it also creates an availability attack surface. By injecting short safety-plausible phrases (1-5 tokens) into a robots audio channel, an adversary can trigger the models safety reasoning to halt or disrupt execution without jailbreaking the model or overriding its policy. In the embodied setting, this is a semantic denial-of-service attack: the agent stops because the injected signal looks like a legitimate alert. Across four vision-language models, seven prompt-level defenses, three deployment modes, and single- and multi-injection settings, we find that prompt-only defenses trade off attack suppression against genuine hazard response. The strongest defenses reduce hard-stop attack success on some models, but defenses change the form of disruption, not its fact: suppressed hard stops re-emerge as acknowledge loops and false alerts, which we measure with Disruption Success Rate (DSR). We further find that injection variety is consistently more effective than repeating the same phrase, suggesting that models treat diverse safety cues as corroborating evidence. The practical implication is architectural rather than prompt-level: systems that route unauthenticated audio text directly into the LLM create an avoidable security dependency between safety monitoring and action selection.
Split and Conquer Partial Deepfake Speech
Apr 03, 2026Partial deepfake speech detection requires identifying manipulated regions that may occur within short temporal portions of an otherwise bona fide utterance, making the task particularly challenging for conventional utterance-level classifiers. We propose a split-and-conquer framework that decomposes the problem into two stages: boundary detection and segment-level classification. A dedicated boundary detector first identifies temporal transition points, allowing the audio signal to be divided into segments that are expected to contain acoustically consistent content. Each resulting segment is then evaluated independently to determine whether it corresponds to bona fide or fake speech. This formulation simplifies the learning objective by explicitly separating temporal localization from authenticity assessment, allowing each component to focus on a well-defined task. To further improve robustness, we introduce a reflection-based multi-length training strategy that converts variable-duration segments into several fixed input lengths, producing diverse feature-space representations. Each stage is trained using multiple configurations with different feature extractors and augmentation strategies, and their complementary predictions are fused to obtain improved final models. Experiments on the PartialSpoof benchmark demonstrate state-of-the-art performance across multiple temporal resolutions as well as at the utterance level, with substantial improvements in the accurate detection and localization of spoofed regions. In addition, the proposed method achieves state-of-the-art performance on the Half-Truth dataset, further confirming the robustness and generalization capability of the framework.
DiT-Flow: Speech Enhancement Robust to Multiple Distortions based on Flow Matching in Latent Space and Diffusion Transformers
Mar 23, 2026Recent advances in generative models, such as diffusion and flow matching, have shown strong performance in audio tasks. However, speech enhancement (SE) models are typically trained on limited datasets and evaluated under narrow conditions, limiting real-world applicability. To address this, we propose DiT-Flow, a flow matching-based SE framework built on the latent Diffusion Transformer (DiT) backbone and trained for robustness across diverse distortions, including noise, reverberation, and compression. DiT-Flow operates on compact variational auto-encoders (VAEs)-derived latent features. We validated our approach on StillSonicSet, a synthetic yet acoustically realistic dataset composed of LibriSpeech, FSD50K, FMA, and 90 Matterport3D scenes. Experiments show that DiT-Flow consistently outperforms state-of-the-art generative SE models, demonstrating the effectiveness of flow matching in multi-condition speech enhancement. Despite ongoing efforts to expand synthetic data realism, a persistent bottleneck in SE is the inevitable mismatch between training and deployment conditions. By integrating LoRA with the MoE framework, we achieve both parameter-efficient and high-performance training for DiT-Flow robust to multiple distortions with using 4.9% percentage of the total parameters to obtain a better performance on five unseen distortions.
Where Vision Becomes Text: Locating the OCR Routing Bottleneck in Vision-Language Models
Feb 26, 2026Vision-language models (VLMs) can read text from images, but where does this optical character recognition (OCR) information enter the language processing stream? We investigate the OCR routing mechanism across three architecture families (Qwen3-VL, Phi-4, InternVL3.5) using causal interventions. By computing activation differences between original images and text-inpainted versions, we identify architecture-specific OCR bottlenecks whose dominant location depends on the vision-language integration strategy: DeepStack models (Qwen) show peak sensitivity at mid-depth (about 50%) for scene text, while single-stage projection models (Phi-4, InternVL) peak at early layers (6-25%), though the exact layer of maximum effect varies across datasets. The OCR signal is remarkably low-dimensional: PC1 captures 72.9% of variance. Crucially, principal component analysis (PCA) directions learned on one dataset transfer to others, demonstrating shared text-processing pathways. Surprisingly, in models with modular OCR circuits (notably Qwen3-VL-4B), OCR removal can improve counting performance (up to +6.9 percentage points), suggesting OCR interferes with other visual processing in sufficiently modular architectures.
Autonomous Oil Spill Response Through Liquid Neural Trajectory Modeling and Coordinated Marine Robotics
Aug 17, 2025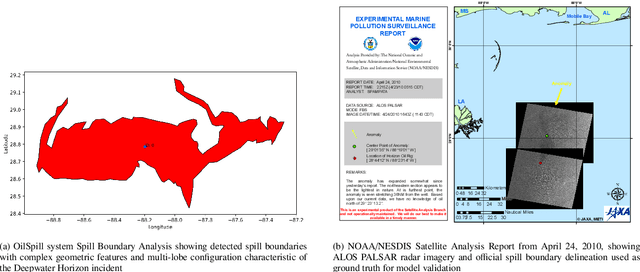
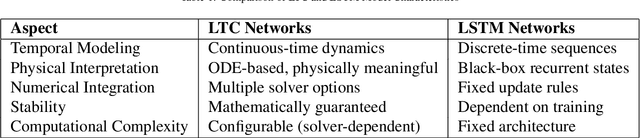
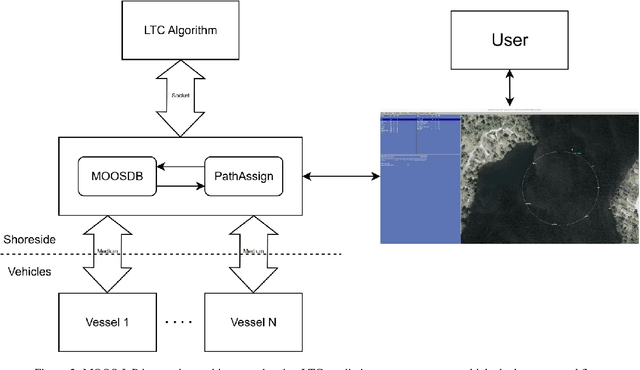

Marine oil spills pose grave environmental and economic risks, threatening marine ecosystems, coastlines, and dependent industries. Predicting and managing oil spill trajectories is highly complex, due to the interplay of physical, chemical, and environmental factors such as wind, currents, and temperature, which makes timely and effective response challenging. Accurate real-time trajectory forecasting and coordinated mitigation are vital for minimizing the impact of these disasters. This study introduces an integrated framework combining a multi-agent swarm robotics system built on the MOOS-IvP platform with Liquid Time-Constant Neural Networks (LTCNs). The proposed system fuses adaptive machine learning with autonomous marine robotics, enabling real-time prediction, dynamic tracking, and rapid response to evolving oil spills. By leveraging LTCNs--well-suited for modeling complex, time-dependent processes--the framework achieves real-time, high-accuracy forecasts of spill movement. Swarm intelligence enables decentralized, scalable, and resilient decision-making among robot agents, enhancing collective monitoring and containment efforts. Our approach was validated using data from the Deepwater Horizon spill, where the LTC-RK4 model achieved 0.96 spatial accuracy, surpassing LSTM approaches by 23%. The integration of advanced neural modeling with autonomous, coordinated robotics demonstrates substantial improvements in prediction precision, flexibility, and operational scalability. Ultimately, this research advances the state-of-the-art for sustainable, autonomous oil spill management and environmental protection by enhancing both trajectory prediction and response coordination.