 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Deep Reinforcement and Supervised Learning to Expedite Indoor Mapping
Paper and Code
Sep 17, 2021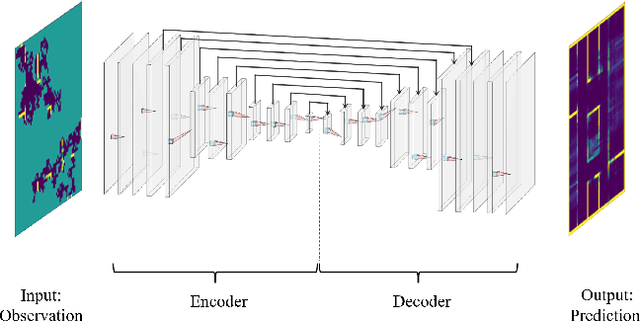
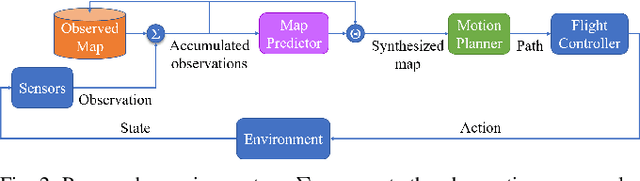
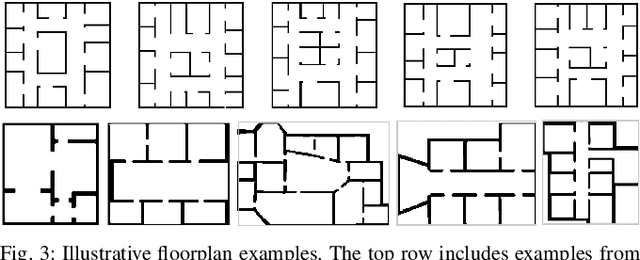
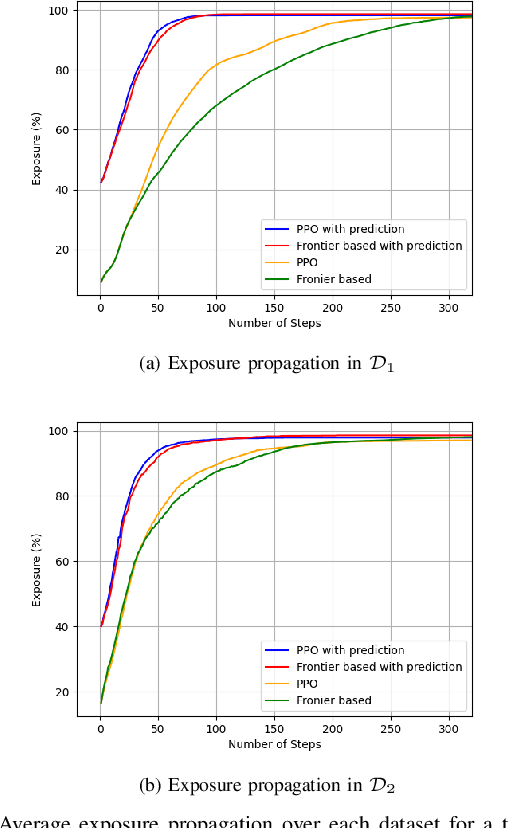
The challenge of mapping indoor environments is addressed. Typical heuristic algorithms for solving the motion planning problem are frontier-based methods, that are especially effective when the environment is completely unknown. However, in cases where prior statistical data on the environment's architectonic features is available, such algorithms can be far from optimal. Furthermore, their calculation time may increase substantially as more areas are exposed. In this paper we propose two means by which to overcome these shortcomings. One is the use of deep reinforcement learning to train the motion planner. The second is the inclusion of a pre-trained generative deep neural network, acting as a map predictor. Each one helps to improve the decision making through use of the learned structural statistics of the environment, and both, being realized as neural networks, ensure a constant calculation time. We show that combining the two methods can shorten the mapping time, compared to frontier-based motion planning, by up to 75%.