 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-flight positional and energy use data set of a DJI Matrice 100 quadcopter for small package delivery
Mar 24, 2021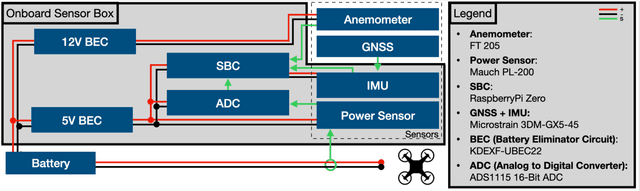
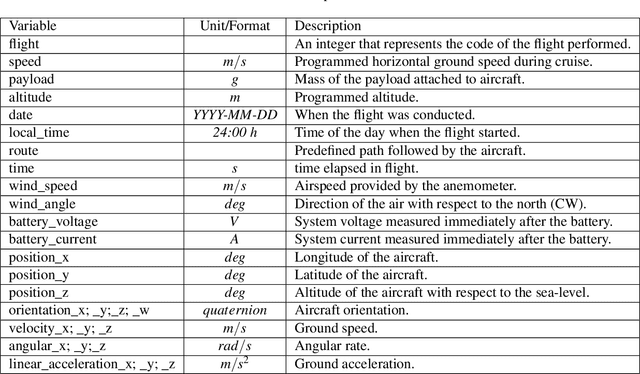
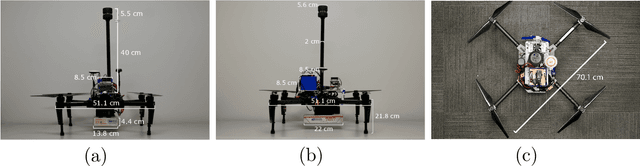
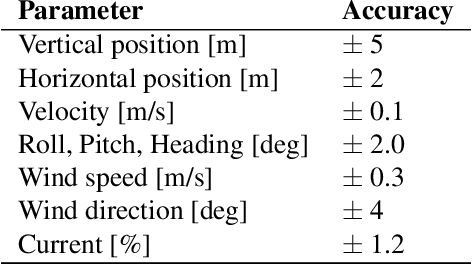
We autonomously direct a small quadcopter package delivery Uncrewed Aerial Vehicle (UAV) or "drone" to take off, fly a specified route, and land for a total of 209 flights while varying a set of operational parameters. The vehicle was equipped with onboard sensors, including GPS, IMU, voltage and current sensors, and an ultrasonic anemometer, to collect high-resolution data on the inertial states, wind speed, and power consumption. Operational parameters, such as commanded ground speed, payload, and cruise altitude, are varied for each flight. This large data set has a total flight time of 10 hours and 45 minutes and was collected from April to October of 2019 covering a total distance of approximately 65 kilometers. The data collected were validated by comparing flights with similar operational parameters. We believe these data will be of great interest to the research and industrial communities, who can use the data to improve UAV designs, safety, and energy efficiency, as well as advance the physical understanding of in-flight operations for package delivery drones.
Place Recognition in Forests with Urquhart Tessellations
Sep 23, 2020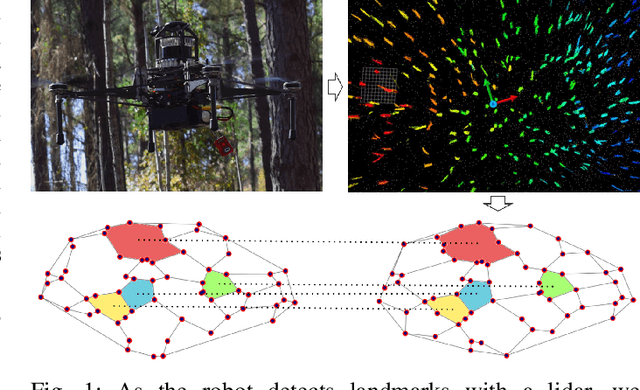
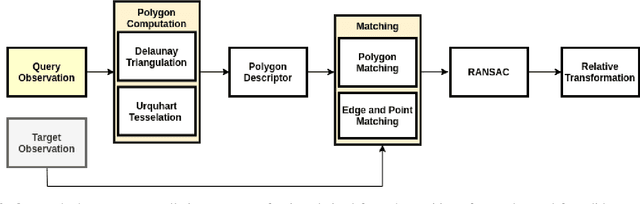
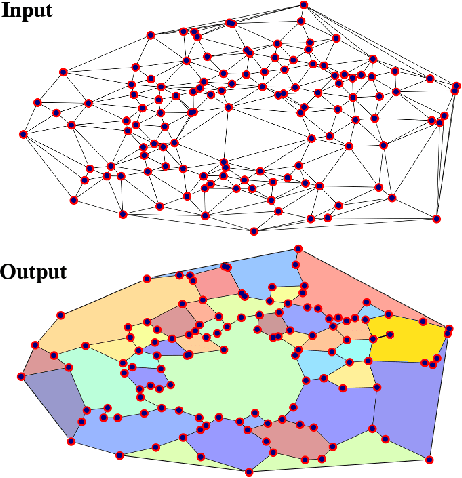
In this letter we present a novel descriptor based on polygons derived from Urquhart tessellations on the position of trees in a forest detected from lidar scans. We present a framework that leverages these polygons to generate a signature that is used detect previously seen observations even with partial overlap and different levels of noise while also inferring landmark correspondences to compute an affine transformation between observations. We run loop-closure experiments in simulation and real-world data map-merging from different flights of an Unmanned Aerial Vehicle (UAV) in a pine tree forest and show that our method outperforms state-of-the-art approaches in accuracy and robustness.