 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCVaR-based Flight Energy Risk Assessment for Multirotor UAVs using a Deep Energy Model
May 31, 2021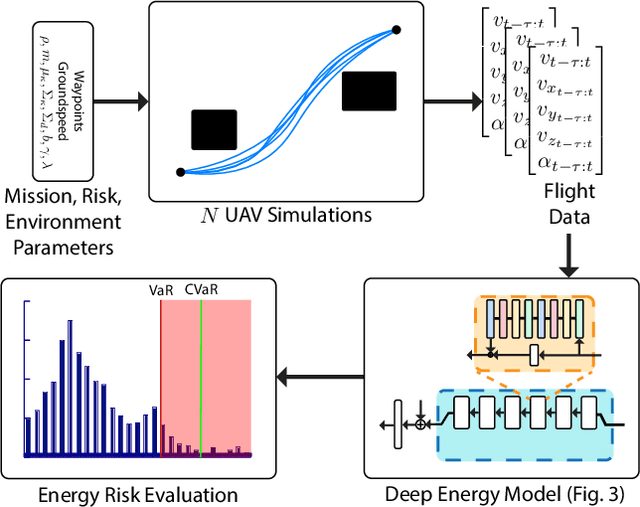
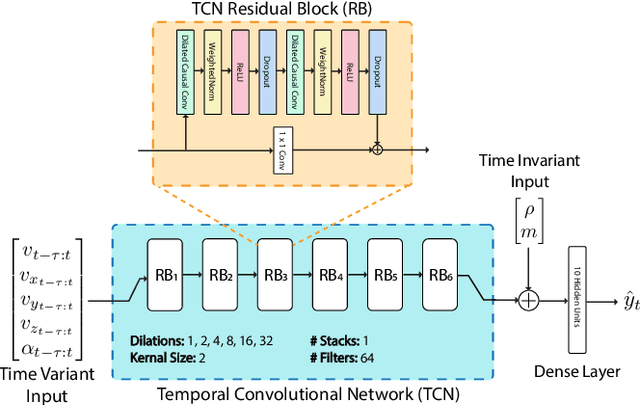
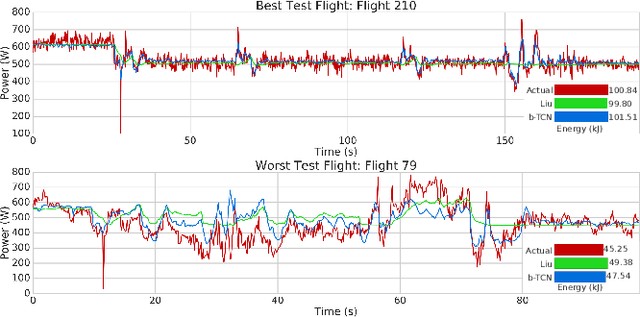
Energy management is a critical aspect of risk assessment for Uncrewed Aerial Vehicle (UAV) flights, as a depleted battery during a flight brings almost guaranteed vehicle damage and a high risk of human injuries or property damage. Predicting the amount of energy a flight will consume is challenging as routing, weather, obstacles, and other factors affect the overall consumption. We develop a deep energy model for a UAV that uses Temporal Convolutional Networks to capture the time varying features while incorporating static contextual information. Our energy model is trained on a real world dataset and does not require segregating flights into regimes. We illustrate an improvement in power predictions by $29\%$ on test flights when compared to a state-of-the-art analytical method. Using the energy model, we can predict the energy usage for a given trajectory and evaluate the risk of running out of battery during flight. We propose using Conditional Value-at-Risk (CVaR) as a metric for quantifying this risk. We show that CVaR captures the risk associated with worst-case energy consumption on a nominal path by transforming the output distribution of Monte Carlo forward simulations into a risk space. Computing the CVaR on the risk-space distribution provides a metric that can evaluate the overall risk of a flight before take-off. Our energy model and risk evaluation method can improve flight safety and evaluate the coverage area from a proposed takeoff location. The video and codebase are available at https://youtu.be/PHXGigqilOA and https://git.io/cvar-risk .
In-flight positional and energy use data set of a DJI Matrice 100 quadcopter for small package delivery
Mar 24, 2021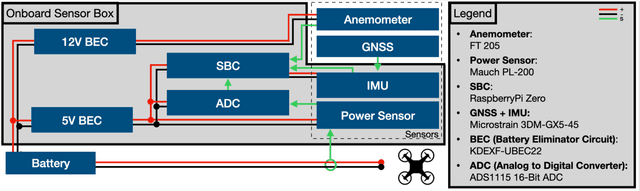
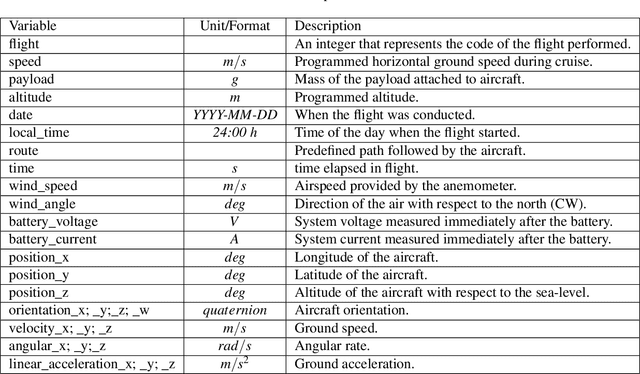
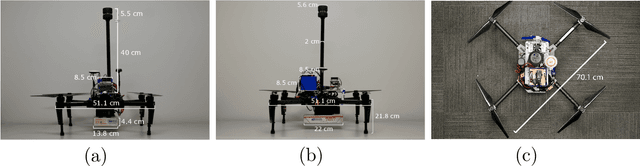
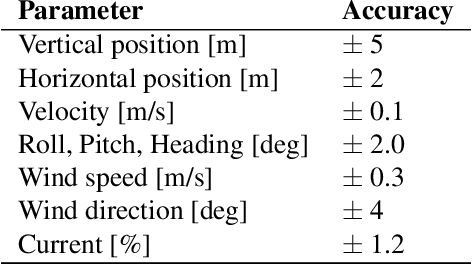
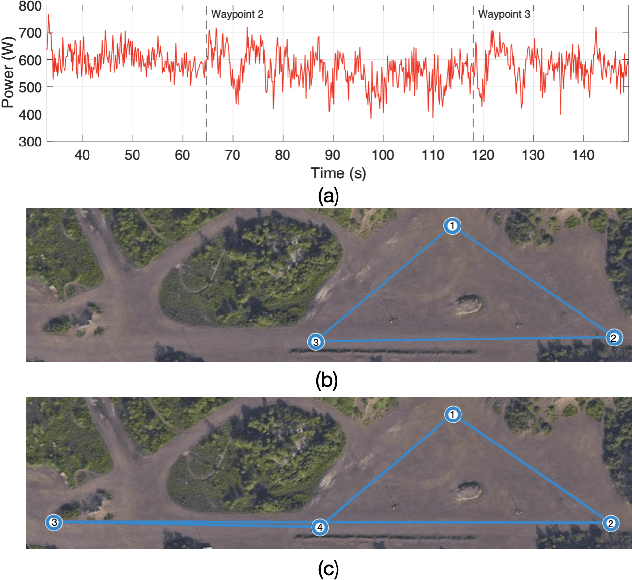
We autonomously direct a small quadcopter package delivery Uncrewed Aerial Vehicle (UAV) or "drone" to take off, fly a specified route, and land for a total of 209 flights while varying a set of operational parameters. The vehicle was equipped with onboard sensors, including GPS, IMU, voltage and current sensors, and an ultrasonic anemometer, to collect high-resolution data on the inertial states, wind speed, and power consumption. Operational parameters, such as commanded ground speed, payload, and cruise altitude, are varied for each flight. This large data set has a total flight time of 10 hours and 45 minutes and was collected from April to October of 2019 covering a total distance of approximately 65 kilometers. The data collected were validated by comparing flights with similar operational parameters. We believe these data will be of great interest to the research and industrial communities, who can use the data to improve UAV designs, safety, and energy efficiency, as well as advance the physical understanding of in-flight operations for package delivery drones.