Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlace Recognition in Forests with Urquhart Tessellations
Paper and Code
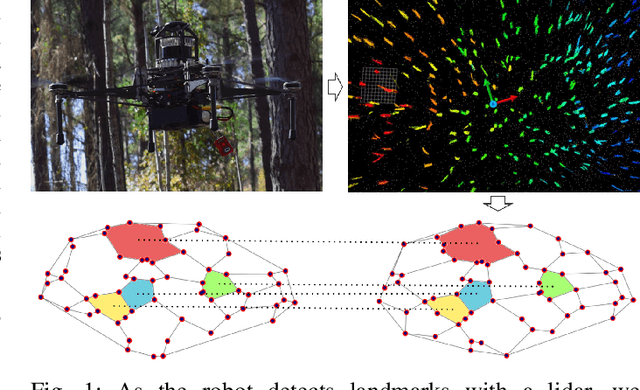
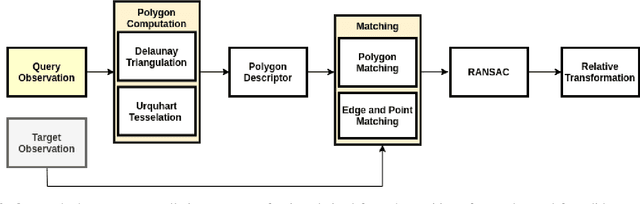
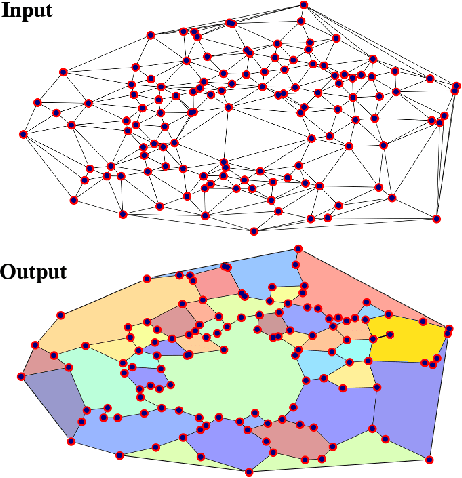
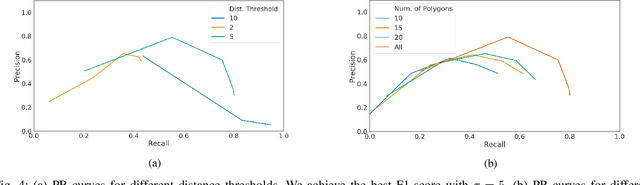
In this letter we present a novel descriptor based on polygons derived from Urquhart tessellations on the position of trees in a forest detected from lidar scans. We present a framework that leverages these polygons to generate a signature that is used detect previously seen observations even with partial overlap and different levels of noise while also inferring landmark correspondences to compute an affine transformation between observations. We run loop-closure experiments in simulation and real-world data map-merging from different flights of an Unmanned Aerial Vehicle (UAV) in a pine tree forest and show that our method outperforms state-of-the-art approaches in accuracy and robustness.
* 8 pages, 6 Figures
View paper on