 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainable LightGBM Approach for Predicting Myocardial Infarction Mortality
Apr 23, 2024


Myocardial Infarction is a main cause of mortality globally, and accurate risk prediction is crucial for improving patient outcomes. Machine Learning techniques have shown promise in identifying high-risk patients and predicting outcomes. However, patient data often contain vast amounts of information and missing values, posing challenges for feature selection and imputation methods. In this article, we investigate the impact of the data preprocessing task and compare three ensembles boosted tree methods to predict the risk of mortality in patients with myocardial infarction. Further, we use the Tree Shapley Additive Explanations method to identify relationships among all the features for the performed predictions, leveraging the entirety of the available data in the analysis. Notably, our approach achieved a superior performance when compared to other existing machine learning approaches, with an F1-score of 91,2% and an accuracy of 91,8% for LightGBM without data preprocessing.
Large-scale Autonomous Flight with Real-time Semantic SLAM under Dense Forest Canopy
Sep 19, 2021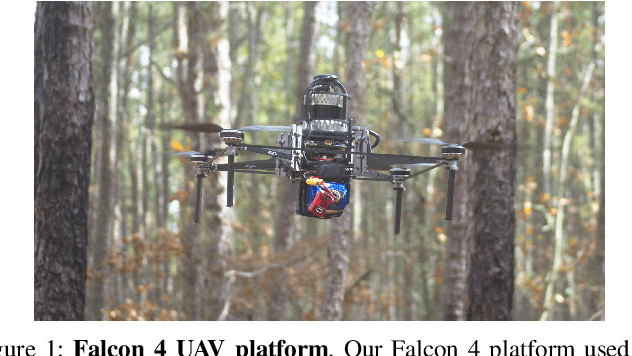
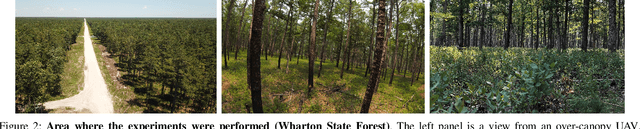
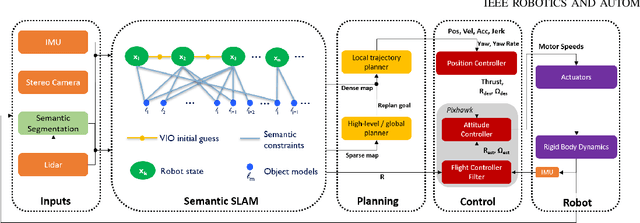
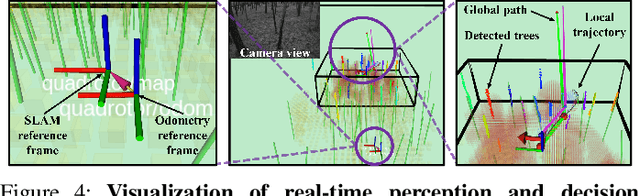
In this letter, we propose an integrated autonomous flight and semantic SLAM system that can perform long-range missions and real-time semantic mapping in highly cluttered, unstructured, and GPS-denied under-canopy environments. First, tree trunks and ground planes are detected from LIDAR scans. We use a neural network and an instance extraction algorithm to enable semantic segmentation in real time onboard the UAV. Second, detected tree trunk instances are modeled as cylinders and associated across the whole LIDAR sequence. This semantic data association constraints both robot poses as well as trunk landmark models. The output of semantic SLAM is used in state estimation, planning, and control algorithms in real time. The global planner relies on a sparse map to plan the shortest path to the global goal, and the local trajectory planner uses a small but finely discretized robot-centric map to plan a dynamically feasible and collision-free trajectory to the local goal. Both the global path and local trajectory lead to drift-corrected goals, thus helping the UAV execute its mission accurately and safely.
A Neurorobotics Approach to Behaviour Selection based on Human Activity Recognition
Jul 27, 2021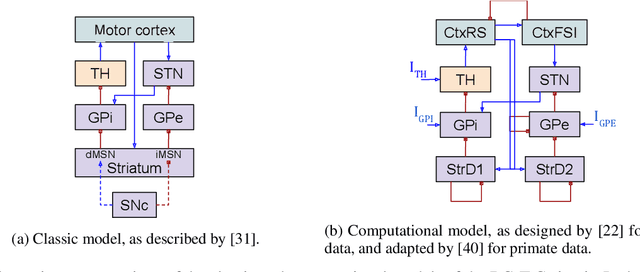
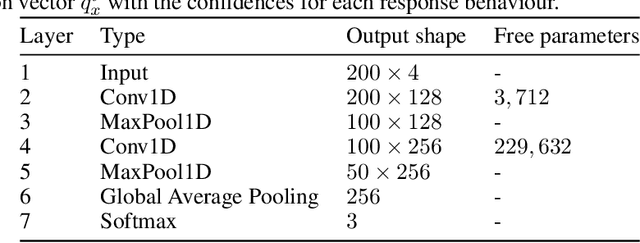
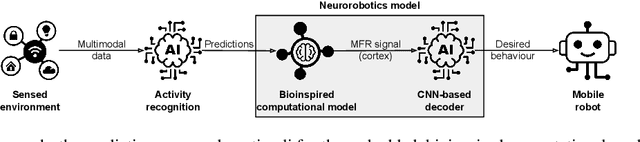
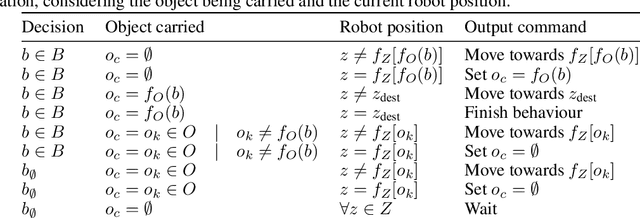
Behaviour selection has been an active research topic for robotics, in particular in the field of human-robot interaction. For a robot to interact effectively and autonomously with humans, the coupling between techniques for human activity recognition, based on sensing information, and robot behaviour selection, based on decision-making mechanisms, is of paramount importance. However, most approaches to date consist of deterministic associations between the recognised activities and the robot behaviours, neglecting the uncertainty inherent to sequential predictions in real-time applications. In this paper, we address this gap by presenting a neurorobotics approach based on computational models that resemble neurophysiological aspects of living beings. This neurorobotics approach was compared to a non-bioinspired, heuristics-based approach. To evaluate both approaches, a robot simulation is developed, in which a mobile robot has to accomplish tasks according to the activity being performed by the inhabitant of an intelligent home. The outcomes of each approach were evaluated according to the number of correct outcomes provided by the robot. Results revealed that the neurorobotics approach is advantageous, especially considering the computational models based on more complex animals.
A Data-Driven Biophysical Computational Model of Parkinson's Disease based on Marmoset Monkeys
Jul 27, 2021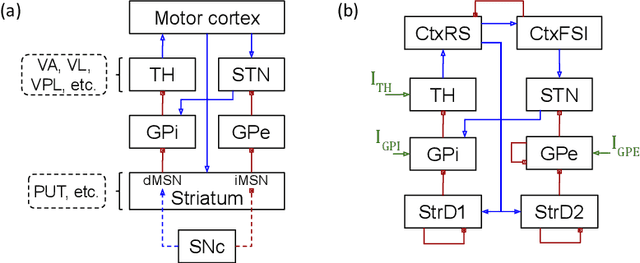
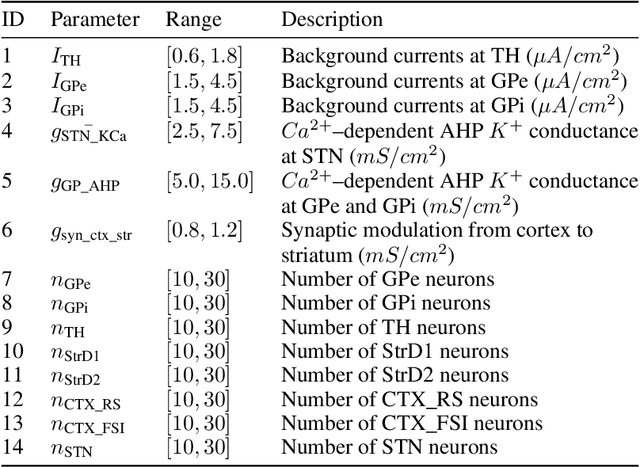
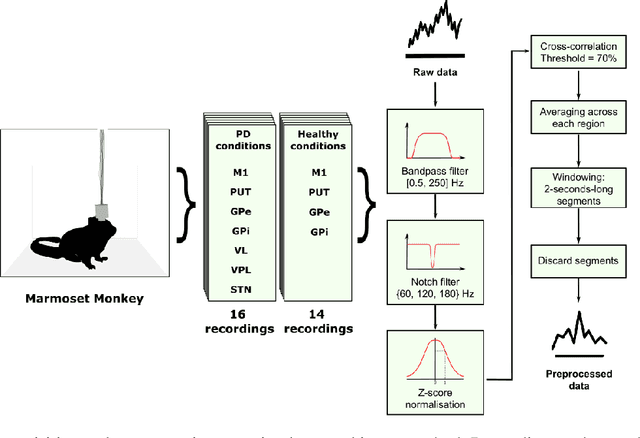

In this work we propose a new biophysical computational model of brain regions relevant to Parkinson's Disease based on local field potential data collected from the brain of marmoset monkeys. Parkinson's disease is a neurodegenerative disorder, linked to the death of dopaminergic neurons at the substantia nigra pars compacta, which affects the normal dynamics of the basal ganglia-thalamus-cortex neuronal circuit of the brain. Although there are multiple mechanisms underlying the disease, a complete description of those mechanisms and molecular pathogenesis are still missing, and there is still no cure. To address this gap, computational models that resemble neurobiological aspects found in animal models have been proposed. In our model, we performed a data-driven approach in which a set of biologically constrained parameters is optimised using differential evolution. Evolved models successfully resembled single-neuron mean firing rates and spectral signatures of local field potentials from healthy and parkinsonian marmoset brain data. As far as we are concerned, this is the first computational model of Parkinson's Disease based on simultaneous electrophysiological recordings from seven brain regions of Marmoset monkeys. Results show that the proposed model could facilitate the investigation of the mechanisms of PD and support the development of techniques that can indicate new therapies. It could also be applied to other computational neuroscience problems in which biological data could be used to fit multi-scale models of brain circuits.
Place Recognition in Forests with Urquhart Tessellations
Sep 23, 2020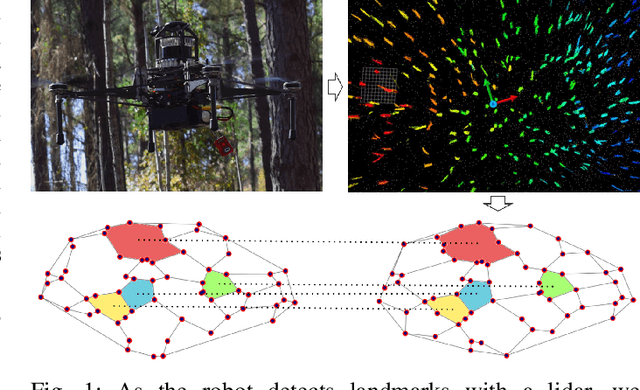
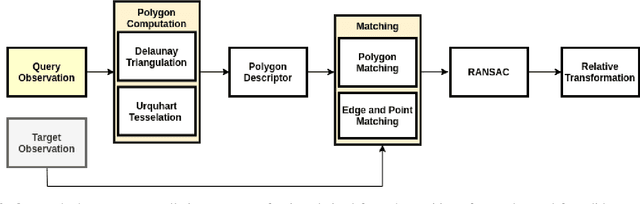
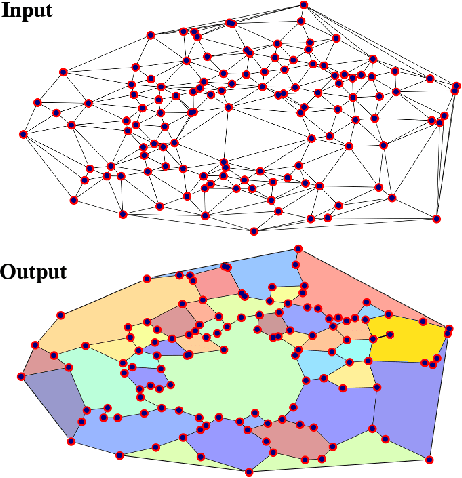
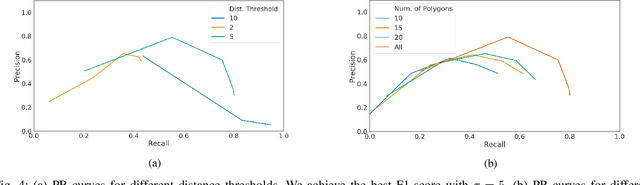
In this letter we present a novel descriptor based on polygons derived from Urquhart tessellations on the position of trees in a forest detected from lidar scans. We present a framework that leverages these polygons to generate a signature that is used detect previously seen observations even with partial overlap and different levels of noise while also inferring landmark correspondences to compute an affine transformation between observations. We run loop-closure experiments in simulation and real-world data map-merging from different flights of an Unmanned Aerial Vehicle (UAV) in a pine tree forest and show that our method outperforms state-of-the-art approaches in accuracy and robustness.
SLOAM: Semantic Lidar Odometry and Mapping for Forest Inventory
Dec 29, 2019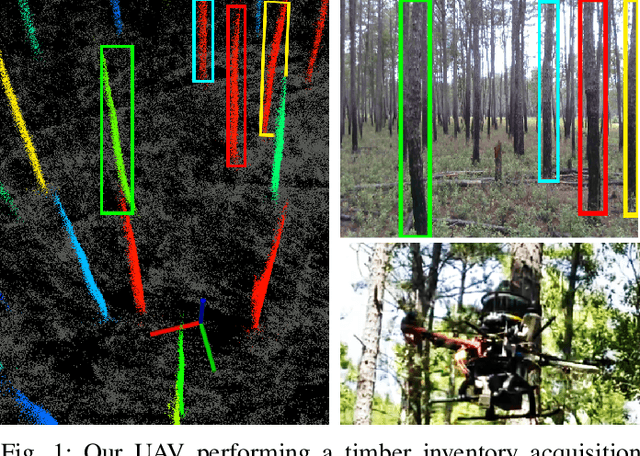
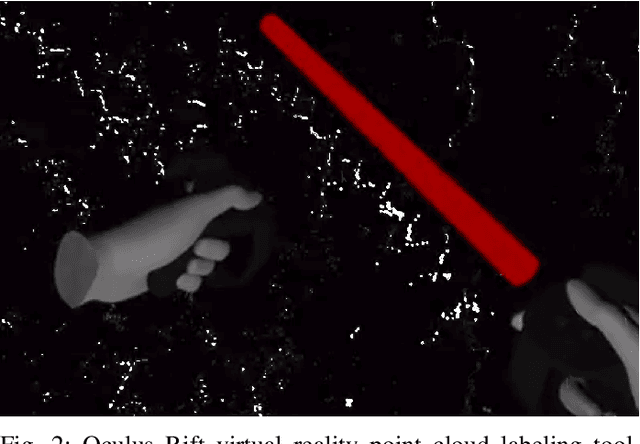
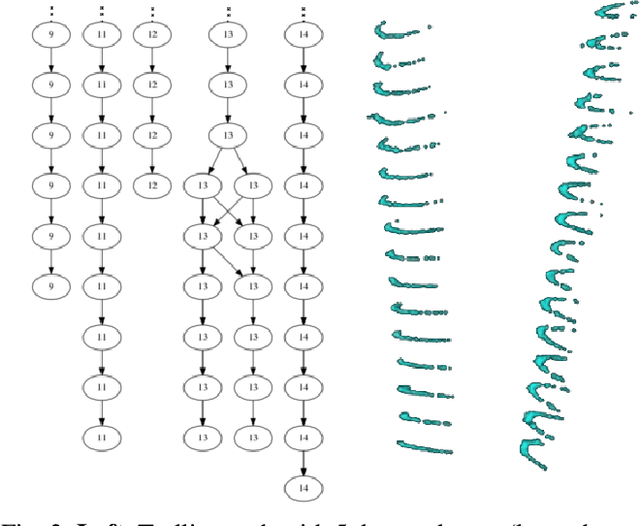
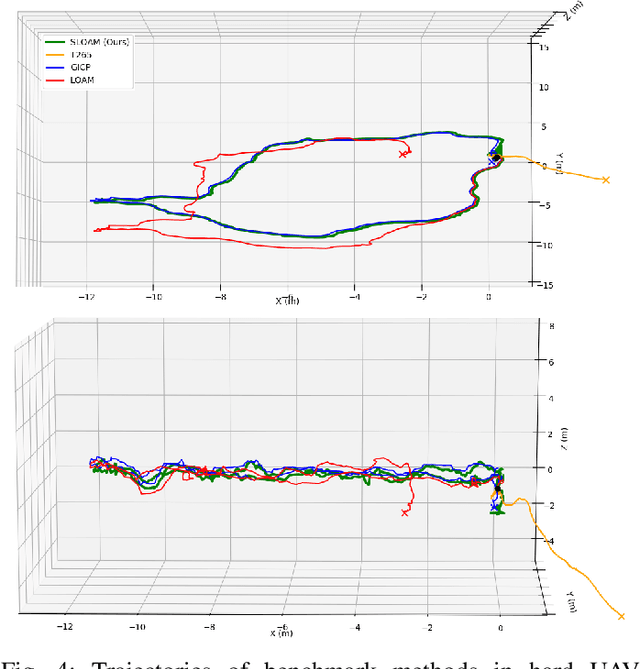
This paper describes an end-to-end pipeline for tree diameter estimation based on semantic segmentation and lidar odometry and mapping. Accurate mapping of this type of environment is challenging since the ground and the trees are surrounded by leaves, thorns and vines, and the sensor typically experiences extreme motion. We propose a semantic feature based pose optimization that simultaneously refines the tree models while estimating the robot pose. The pipeline utilizes a custom virtual reality tool for labeling 3D scans that is used to train a semantic segmentation network. The masked point cloud is used to compute a trellis graph that identifies individual instances and extracts relevant features that are used by the SLAM module. We show that traditional lidar and image based methods fail in the forest environment on both Unmanned Aerial Vehicle (UAV) and hand-carry systems, while our method is more robust, scalable, and automatically generates tree diameter estimations.