 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient quantitative assessment of robot swarms: coverage and targeting Lévy strategies
Feb 14, 2022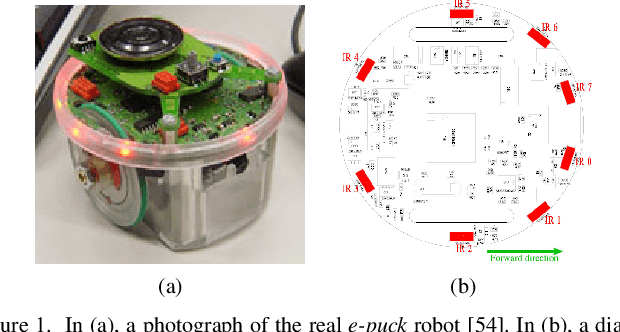
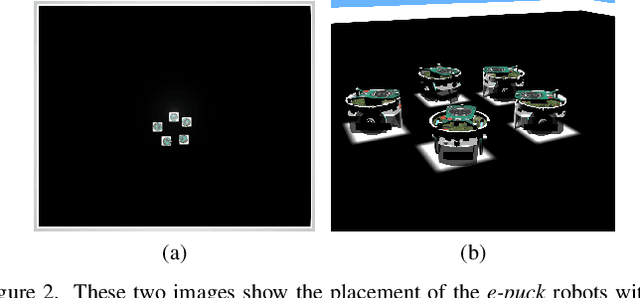
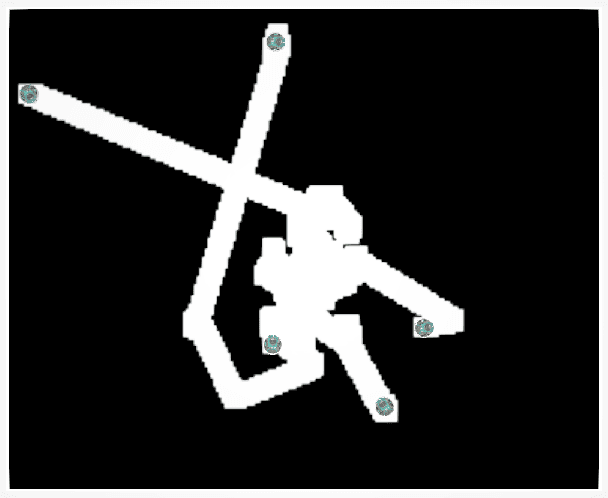
Biologically inspired strategies have long been adapted to swarm robotic systems, including biased random walks, reaction to chemotactic cues and long-range coordination. In this paper we apply analysis tools developed for modeling biological systems, such as continuum descriptions, to the efficient quantitative characterization of robot swarms. As an illustration, both Brownian and L\'{e}vy strategies with a characteristic long-range movement are discussed. As a result we obtain computationally fast methods for the optimization of robot movement laws to achieve a prescribed collective behavior. We show how to compute performance metrics like coverage and hitting times, and illustrate the accuracy and efficiency of our approach for area coverage and search problems. Comparisons between the continuum model and robotic simulations confirm the quantitative agreement and speed up of our approach. Results confirm and quantify the advantage of L\'{e}vy strategies over Brownian motion for search and area coverage problems in swarm robotics.
A Neurorobotics Approach to Behaviour Selection based on Human Activity Recognition
Jul 27, 2021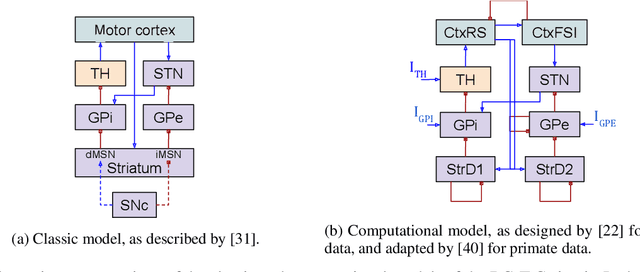
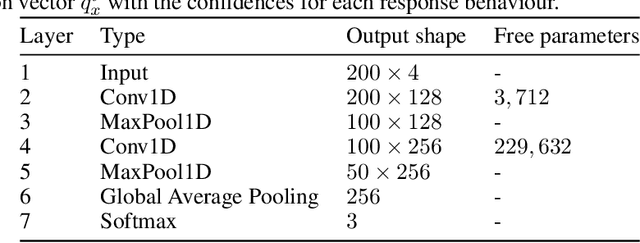
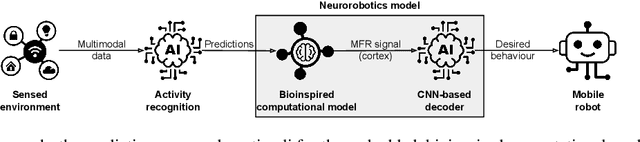
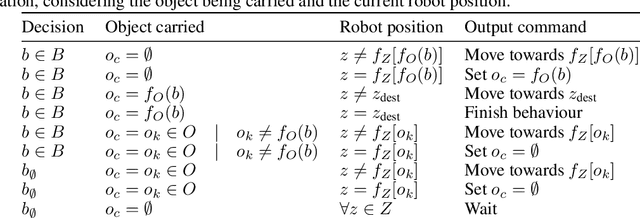
Behaviour selection has been an active research topic for robotics, in particular in the field of human-robot interaction. For a robot to interact effectively and autonomously with humans, the coupling between techniques for human activity recognition, based on sensing information, and robot behaviour selection, based on decision-making mechanisms, is of paramount importance. However, most approaches to date consist of deterministic associations between the recognised activities and the robot behaviours, neglecting the uncertainty inherent to sequential predictions in real-time applications. In this paper, we address this gap by presenting a neurorobotics approach based on computational models that resemble neurophysiological aspects of living beings. This neurorobotics approach was compared to a non-bioinspired, heuristics-based approach. To evaluate both approaches, a robot simulation is developed, in which a mobile robot has to accomplish tasks according to the activity being performed by the inhabitant of an intelligent home. The outcomes of each approach were evaluated according to the number of correct outcomes provided by the robot. Results revealed that the neurorobotics approach is advantageous, especially considering the computational models based on more complex animals.
A Data-Driven Biophysical Computational Model of Parkinson's Disease based on Marmoset Monkeys
Jul 27, 2021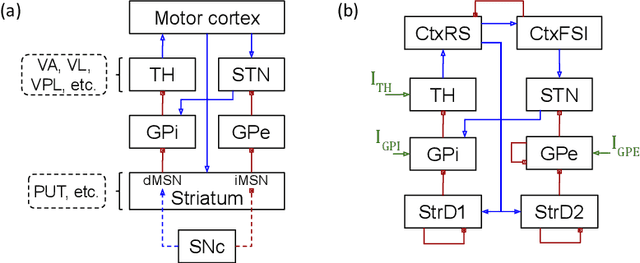
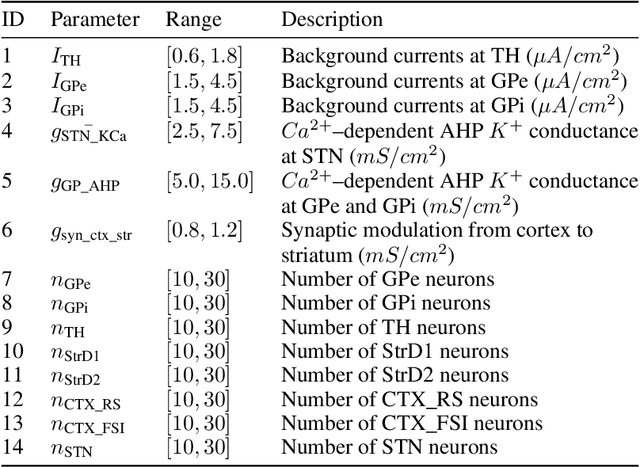
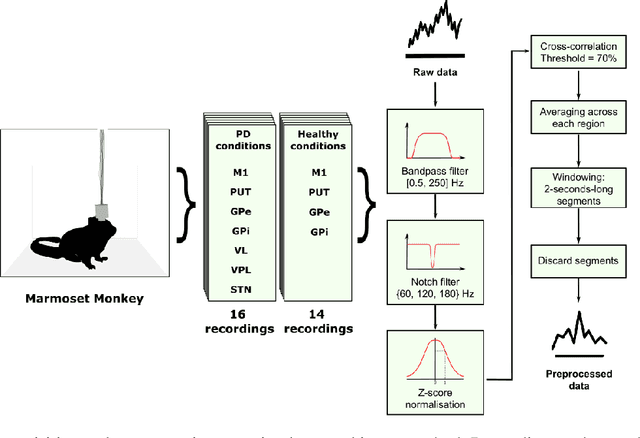

In this work we propose a new biophysical computational model of brain regions relevant to Parkinson's Disease based on local field potential data collected from the brain of marmoset monkeys. Parkinson's disease is a neurodegenerative disorder, linked to the death of dopaminergic neurons at the substantia nigra pars compacta, which affects the normal dynamics of the basal ganglia-thalamus-cortex neuronal circuit of the brain. Although there are multiple mechanisms underlying the disease, a complete description of those mechanisms and molecular pathogenesis are still missing, and there is still no cure. To address this gap, computational models that resemble neurobiological aspects found in animal models have been proposed. In our model, we performed a data-driven approach in which a set of biologically constrained parameters is optimised using differential evolution. Evolved models successfully resembled single-neuron mean firing rates and spectral signatures of local field potentials from healthy and parkinsonian marmoset brain data. As far as we are concerned, this is the first computational model of Parkinson's Disease based on simultaneous electrophysiological recordings from seven brain regions of Marmoset monkeys. Results show that the proposed model could facilitate the investigation of the mechanisms of PD and support the development of techniques that can indicate new therapies. It could also be applied to other computational neuroscience problems in which biological data could be used to fit multi-scale models of brain circuits.
Autonomous Cooperative Flight Control for Airship Swarms
Apr 16, 2020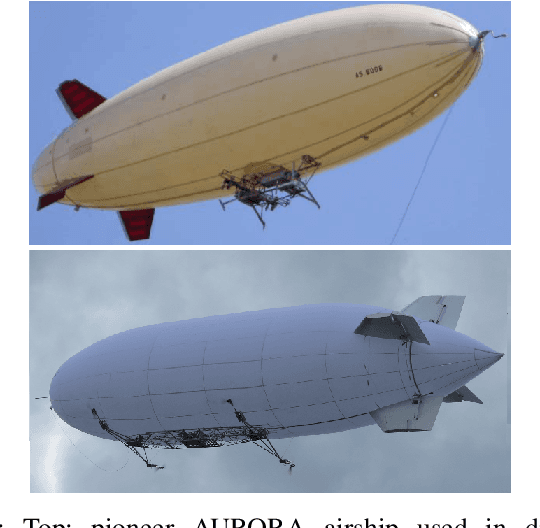


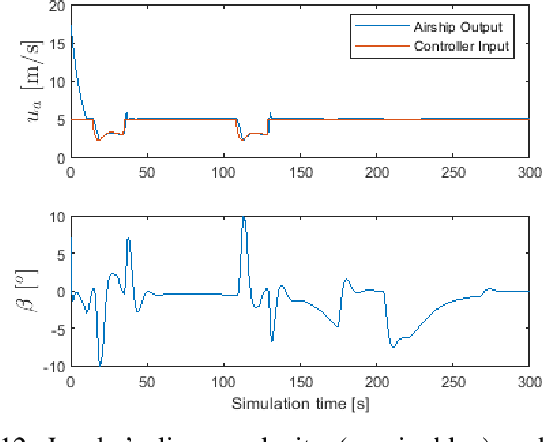
This work investigates two approaches for the design of autonomous cooperative flight controllers for airship swarms. The first controller is based on formation flight and the second one is based on swarm intelligence strategies. In both cases, the team of airships needs to perform two different tasks: waypoint path following and ground moving target tracking. The UAV platform considered in this work is the NOAMAY airship developed in Brazil. We use a simulated environment to test the proposed approaches. Results show the inherent flexibility of the swarm intelligence approach on both tasks.
EvoMan: Game-playing Competition
Jan 04, 2020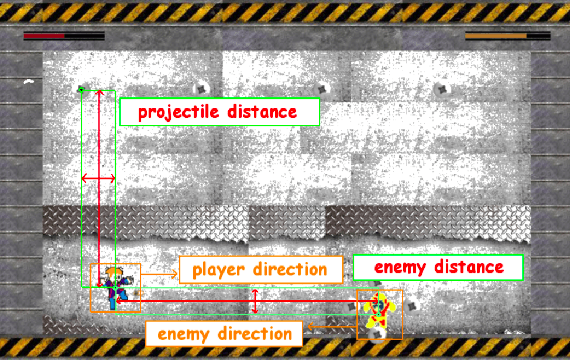
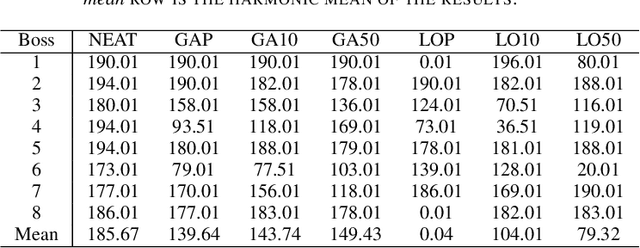
This paper describes a competition proposal for evolving Intelligent Agents for the game-playing framework called EvoMan. The framework is based on the boss fights of the game called Mega Man II developed by Capcom. For this particular competition, the main goal is to beat all of the eight bosses using a generalist strategy. In other words, the competitors should train the agent to beat a set of the bosses and then the agent will be evaluated by its performance against all eight bosses. At the end of this paper, the competitors are provided with baseline results so that they can have an intuition on how good their results are.
Closing the Gap in Swarm Robotics Simulations: An Extended Ardupilot/Gazebo plugin
Nov 16, 2018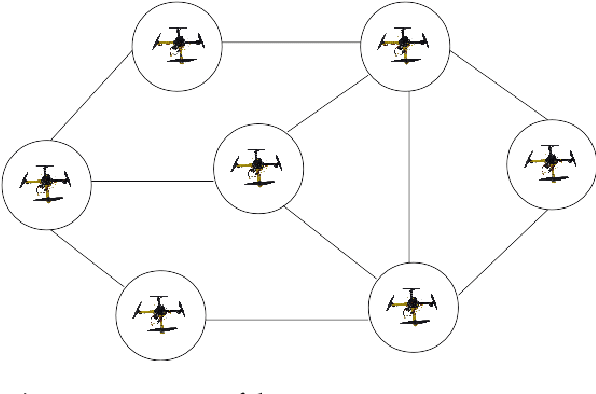
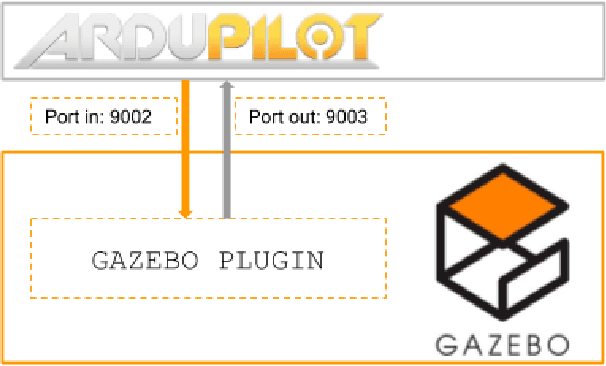
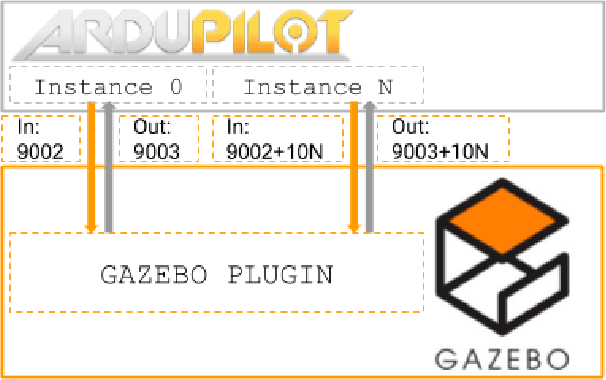

This work provides an extension of Ardupilot's capabilities to allow researchers to develop swarm robotics applications in Robot Operating System(ROS)/Gazebo simulations. Ardupilot is a tool used for autopilot functions in autonomous air, land and underwater robots. However, the original Ardupilot was not designed for applications in the field of swarm robotics. Hence, the main contribution of this paper is to endow Ardupilot with the capability to handle swarm robotics simulations, including the refactoring of the manufacturer's description files. This work offers a comprehensive and realistic simulation test-bed for swarm robotics applications under the ROS/Ardupilot umbrella using an existing off-the-shelf Erlerobotics' erlecopter UAV.