 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Cooperative Flight Control for Airship Swarms
Apr 16, 2020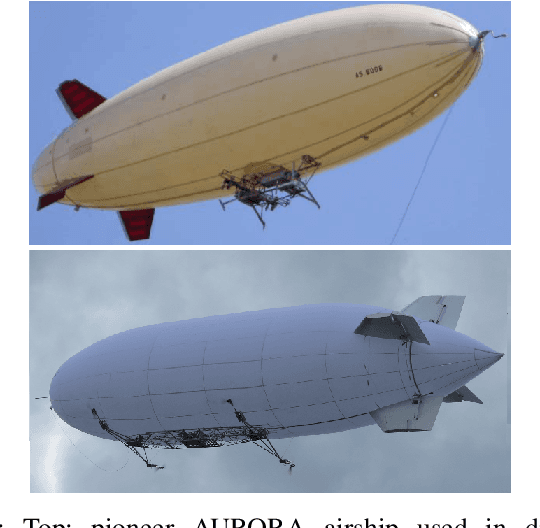


This work investigates two approaches for the design of autonomous cooperative flight controllers for airship swarms. The first controller is based on formation flight and the second one is based on swarm intelligence strategies. In both cases, the team of airships needs to perform two different tasks: waypoint path following and ground moving target tracking. The UAV platform considered in this work is the NOAMAY airship developed in Brazil. We use a simulated environment to test the proposed approaches. Results show the inherent flexibility of the swarm intelligence approach on both tasks.
Hybrid Model-Based and Data-Driven Wind Velocity Estimator for the Navigation System of a Robotic Airship
Jul 14, 2019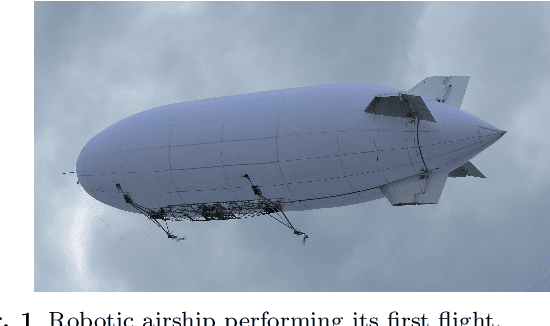
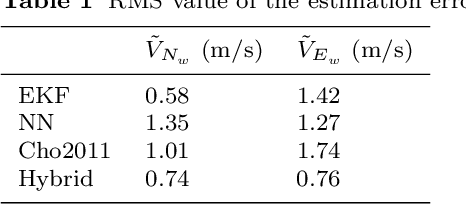
In the context of autonomous airships, several works in control and guidance use wind velocity to design a control law. However, in general, this information is not directly measured in robotic airships. This paper presents three alternative versions for estimation of wind velocity. Firstly, an Extended Kalman Filter is designed as a model-based approach. Then a Neural Network is designed as a data-driven approach. Finally, a hybrid estimator is proposed by performing a fusion between the previous designed estimators: model-based and data-driven. All approaches consider only GPS, IMU and Pitot tube as available sensors. Simulations in a realistic nonlinear model of the airship suggest that the cooperation between these two techniques increases the estimation performance.