 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentification of oil starvation in hydrodynamic journal bearing using rotor vibration and Extended Kalman Filter
Jul 01, 2021
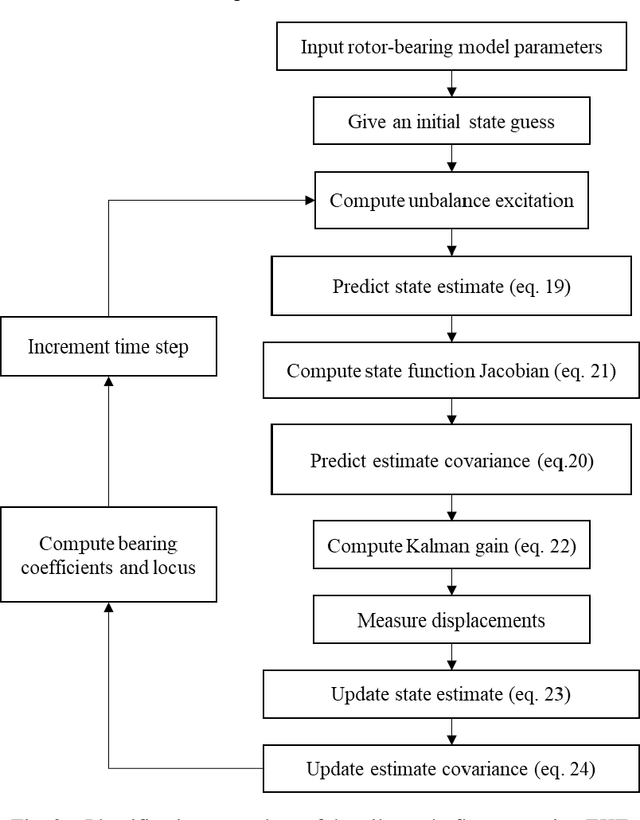
Oil starvation is a critical fault in hydrodynamic bearings caused by insufficient oil supply flowrate. When late detected, this fault can deteriorate the bearings' performance and damage the rotating machine. Thus, early fault identification techniques should be applied to avoid this scenario and allow effective maintenance. However, the literature about the identification of oil starvation fault is relatively recent and very scarce. Among the few studies available, oil starvation has been identified in early stages using a purely deterministic technique, which can be jeopardized by model inaccuracy. Alternatively, this paper proposes a novel method for the identification of oil starvation faults in hydrodynamic bearings using the rotor vibrational responses and the Extended Kalman Filter (EKF), which is a stochastic-determinist state estimator that can deal with modelling and measurement errors. Computational simulations performed in this paper show that the proposed method is suitable to successfully identify the oil starvation faults in real-time even with noisy vibrational responses, thus representing a promising tool for the monitoring of rotating machines.
Hybrid Model-Based and Data-Driven Wind Velocity Estimator for the Navigation System of a Robotic Airship
Jul 14, 2019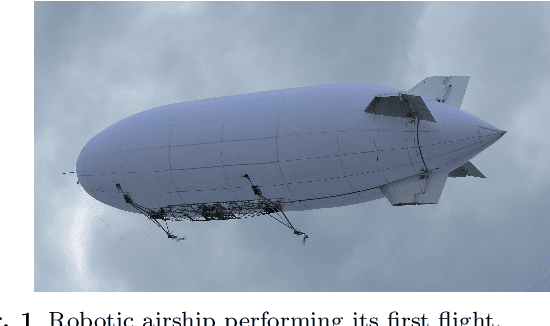
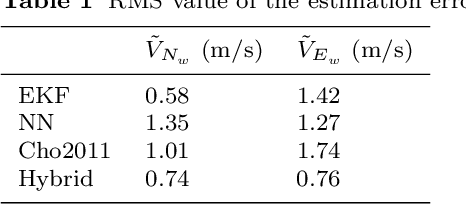
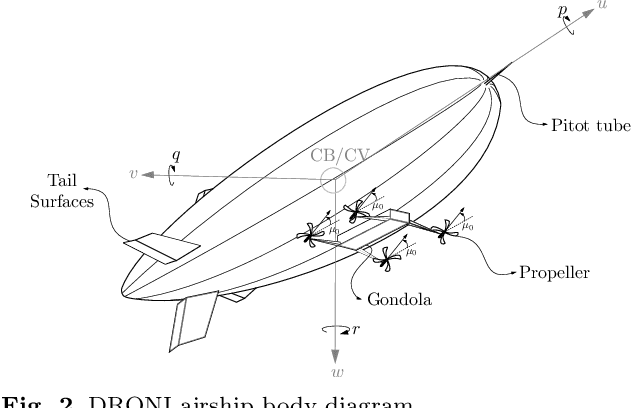
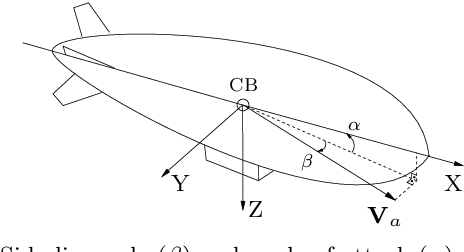
In the context of autonomous airships, several works in control and guidance use wind velocity to design a control law. However, in general, this information is not directly measured in robotic airships. This paper presents three alternative versions for estimation of wind velocity. Firstly, an Extended Kalman Filter is designed as a model-based approach. Then a Neural Network is designed as a data-driven approach. Finally, a hybrid estimator is proposed by performing a fusion between the previous designed estimators: model-based and data-driven. All approaches consider only GPS, IMU and Pitot tube as available sensors. Simulations in a realistic nonlinear model of the airship suggest that the cooperation between these two techniques increases the estimation performance.