 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFacilitating the Emergence of Assistive Robots to Support Frailty: Psychosocial and Environmental Realities
Sep 10, 2025While assistive robots have much potential to help older people with frailty-related needs, there are few in use. There is a gap between what is developed in laboratories and what would be viable in real-world contexts. Through a series of co-design workshops (61 participants across 7 sessions) including those with lived experience of frailty, their carers, and healthcare professionals, we gained a deeper understanding of everyday issues concerning the place of new technologies in their lives. A persona-based approach surfaced emotional, social, and psychological issues. Any assistive solution must be developed in the context of this complex interplay of psychosocial and environmental factors. Our findings, presented as design requirements in direct relation to frailty, can help promote design thinking that addresses people's needs in a more pragmatic way to move assistive robotics closer to real-world use.
Use of a Socially Assistive Robot as a Online Shopping Digital Skills Assistan
Apr 04, 2023This work proposes and analyses the application of a robotic platform as an digital skills assistant. analysing the ethical issues relating to the decision making process in the use case of online food shopping in order to inform a co design session on what, and how, the digital skills assistant should make decisions.
Efficient quantitative assessment of robot swarms: coverage and targeting Lévy strategies
Feb 14, 2022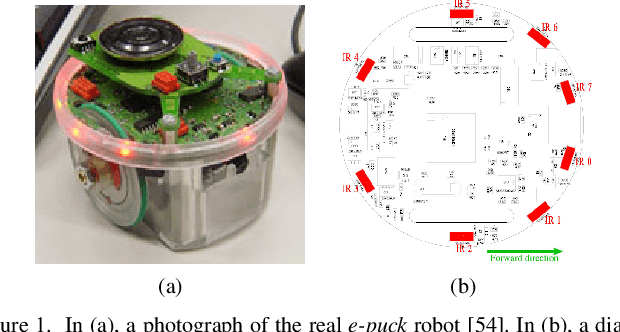
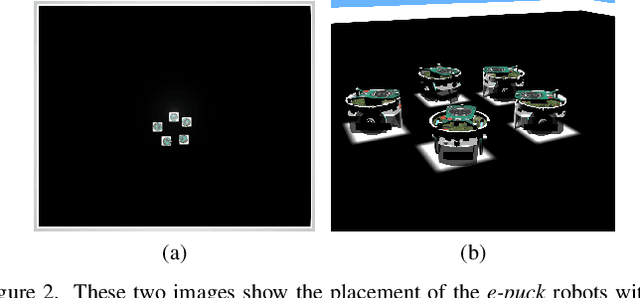
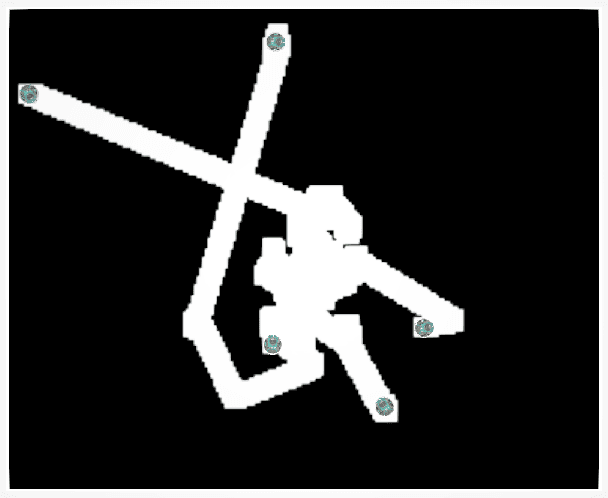
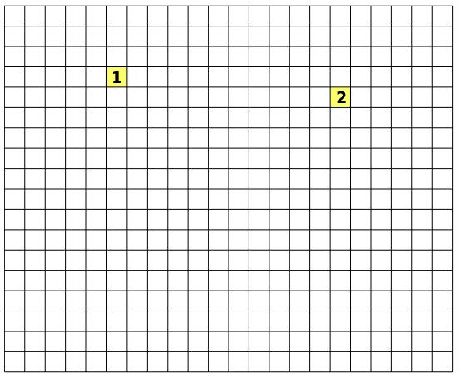
Biologically inspired strategies have long been adapted to swarm robotic systems, including biased random walks, reaction to chemotactic cues and long-range coordination. In this paper we apply analysis tools developed for modeling biological systems, such as continuum descriptions, to the efficient quantitative characterization of robot swarms. As an illustration, both Brownian and L\'{e}vy strategies with a characteristic long-range movement are discussed. As a result we obtain computationally fast methods for the optimization of robot movement laws to achieve a prescribed collective behavior. We show how to compute performance metrics like coverage and hitting times, and illustrate the accuracy and efficiency of our approach for area coverage and search problems. Comparisons between the continuum model and robotic simulations confirm the quantitative agreement and speed up of our approach. Results confirm and quantify the advantage of L\'{e}vy strategies over Brownian motion for search and area coverage problems in swarm robotics.
Co-Design of Assistive Robotics with Additive Manufacturing and Cyber-Physical Modularity to Improve Trust
Aug 02, 2021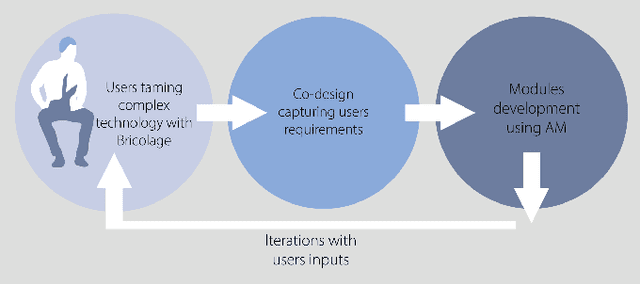
Robotics and automation have the potential to significantly improve quality of life for people with assistive needs and their carers. Adoption of such technologies at this point in time is far from widespread. This paper presents a novel approach to the design of highly customisable robotic concepts, embracing modularity and a co-design process to increase the involvement of end-users in the development life cycle. We discuss this process within the context of an elderly care use case. Using design methodology and additive manufacturing, we outline how key stakeholders can be involved from initial conception through to integration of the final product within their environments. In future work, we will apply this process to demonstrate the effectiveness of our approach for improving long-term acceptance and trust of robotic technology in care contexts.
A Communication Layer for Integrated Sensors and Robotic ecology Solutions to Ambient Intelligence
Jun 09, 2021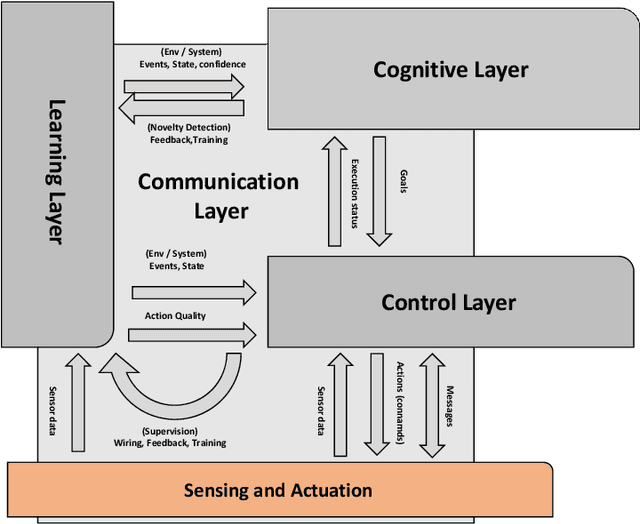
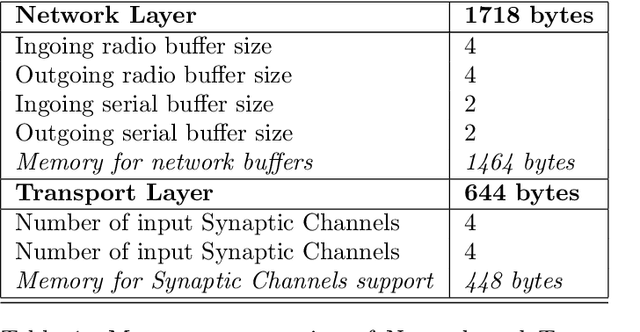
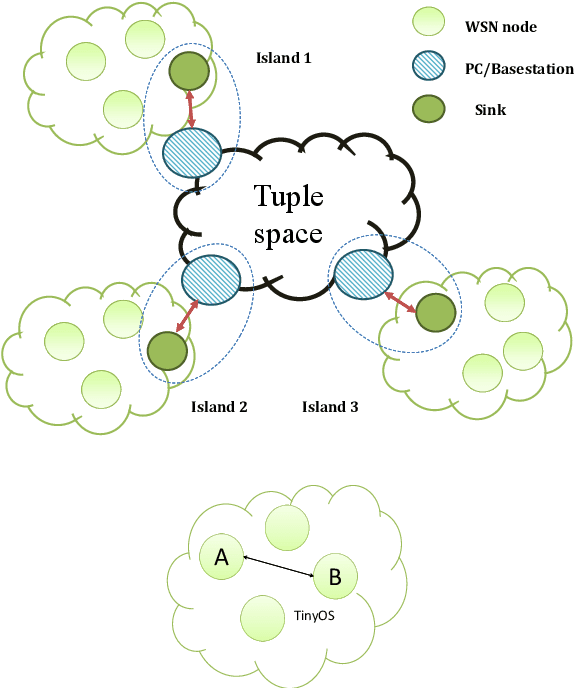
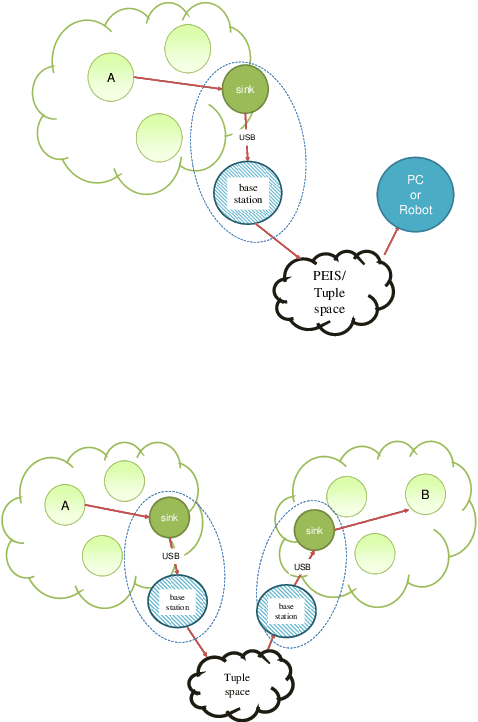
This paper presents a communication framework built to simplify the construction of robotic ecologies, i.e., networks of heterogeneous computational nodes interfaced with sensors, actuators, and mobile robots. Building integrated ambient intelligence (AmI) solutions out of such a wide range of heterogeneous devices is a key requirement for a range of application domains, such as home automation, logistic, security and Ambient Assisted Living (AAL). This goal is challenging since these ecologies need to adapt to changing environments and especially when they include tiny embedded devices with limited computational resources. We discuss a number of requirements characterizing this type of systems and illustrate how they have been addressed in the design of the new communication framework. The most distinguishing aspect of our frameworks is the transparency with which the same communication features are offered across heterogeneous programming languages and operating systems under a consistent API. Finally, we illustrate how the framework has been used to bind together and to support the operations of all the components of adaptive robotic ecologies in two real-world test-beds.
Closing the Gap in Swarm Robotics Simulations: An Extended Ardupilot/Gazebo plugin
Nov 16, 2018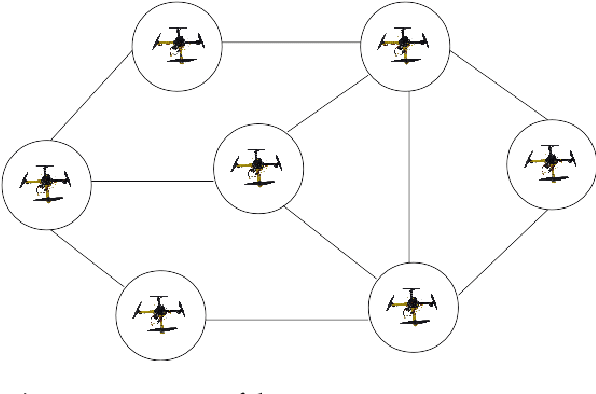
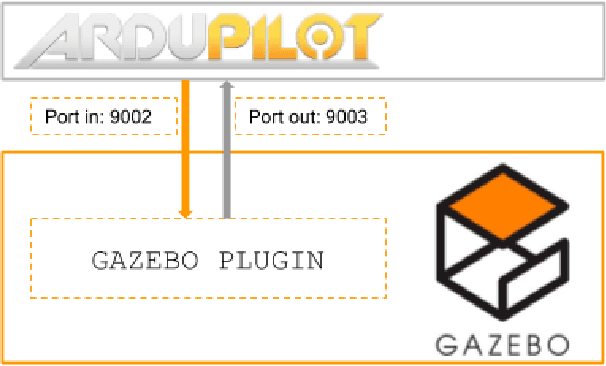
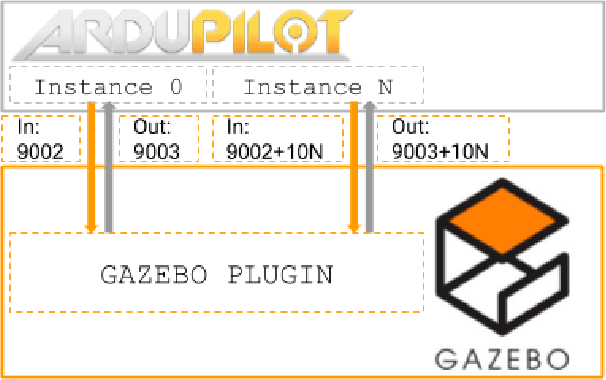

This work provides an extension of Ardupilot's capabilities to allow researchers to develop swarm robotics applications in Robot Operating System(ROS)/Gazebo simulations. Ardupilot is a tool used for autopilot functions in autonomous air, land and underwater robots. However, the original Ardupilot was not designed for applications in the field of swarm robotics. Hence, the main contribution of this paper is to endow Ardupilot with the capability to handle swarm robotics simulations, including the refactoring of the manufacturer's description files. This work offers a comprehensive and realistic simulation test-bed for swarm robotics applications under the ROS/Ardupilot umbrella using an existing off-the-shelf Erlerobotics' erlecopter UAV.