 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUTrack: Multi-Object Tracking with Uncertain Detections
Aug 30, 2024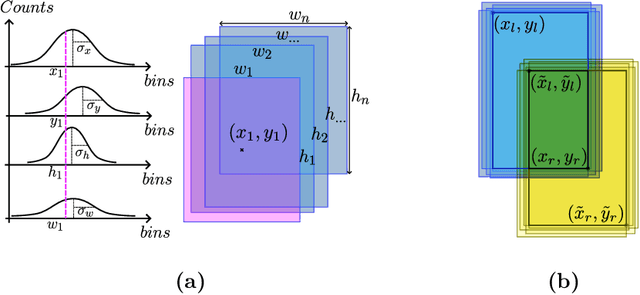
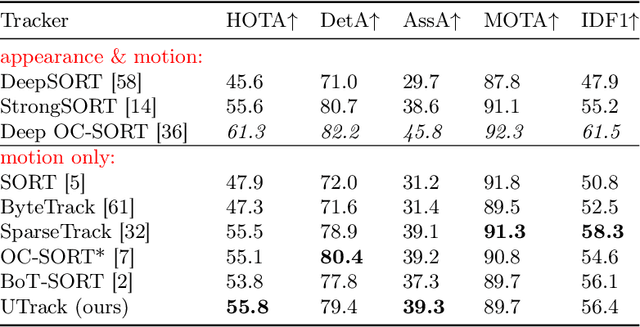
The tracking-by-detection paradigm is the mainstream in multi-object tracking, associating tracks to the predictions of an object detector. Although exhibiting uncertainty through a confidence score, these predictions do not capture the entire variability of the inference process. For safety and security critical applications like autonomous driving, surveillance, etc., knowing this predictive uncertainty is essential though. Therefore, we introduce, for the first time, a fast way to obtain the empirical predictive distribution during object detection and incorporate that knowledge in multi-object tracking. Our mechanism can easily be integrated into state-of-the-art trackers, enabling them to fully exploit the uncertainty in the detections. Additionally, novel association methods are introduced that leverage the proposed mechanism. We demonstrate the effectiveness of our contribution on a variety of benchmarks, such as MOT17, MOT20, DanceTrack, and KITTI.
The 2nd Workshop on Maritime Computer Vision 2024
Nov 23, 2023



The 2nd Workshop on Maritime Computer Vision (MaCVi) 2024 addresses maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicles (USV). Three challenges categories are considered: (i) UAV-based Maritime Object Tracking with Re-identification, (ii) USV-based Maritime Obstacle Segmentation and Detection, (iii) USV-based Maritime Boat Tracking. The USV-based Maritime Obstacle Segmentation and Detection features three sub-challenges, including a new embedded challenge addressing efficicent inference on real-world embedded devices. This report offers a comprehensive overview of the findings from the challenges. We provide both statistical and qualitative analyses, evaluating trends from over 195 submissions. All datasets, evaluation code, and the leaderboard are available to the public at https://macvi.org/workshop/macvi24.
Are Investors Biased Against Women? Analyzing How Gender Affects Startup Funding in Europe
Dec 01, 2021



One of the main challenges of startups is to raise capital from investors. For startup founders, it is therefore crucial to know whether investors have a bias against women as startup founders and in which way startups face disadvantages due to gender bias. Existing works on gender studies have mainly analyzed the US market. In this paper, we aim to give a more comprehensive picture of gender bias in early-stage startup funding. We examine European startups listed on Crunchbase using Semantic Web technologies and analyze how the share of female founders in a founding team affects the funding amount. We find that the relative amount of female founders has a negative impact on the funding raised. Furthermore, we observe that founder characteristics have an effect on the funding raised based on the founders' gender. Moreover, we find that gender bias in early-stage funding is less prevalent for serial founders with entrepreneurial experience as female founders benefit three times more than male founders from already having founded a startup. Overall, our study suggests that gender bias exists and is worth to be considered in the context of startup funding.
Supervised Training of Dense Object Nets using Optimal Descriptors for Industrial Robotic Applications
Feb 16, 2021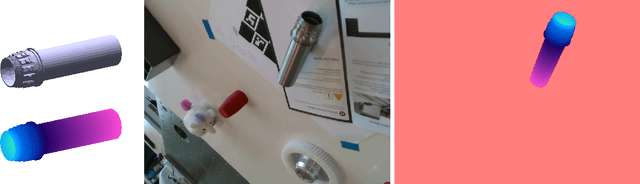

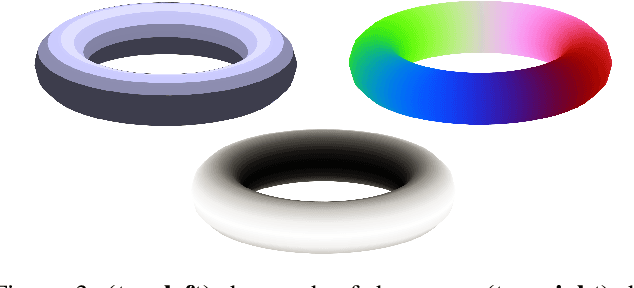
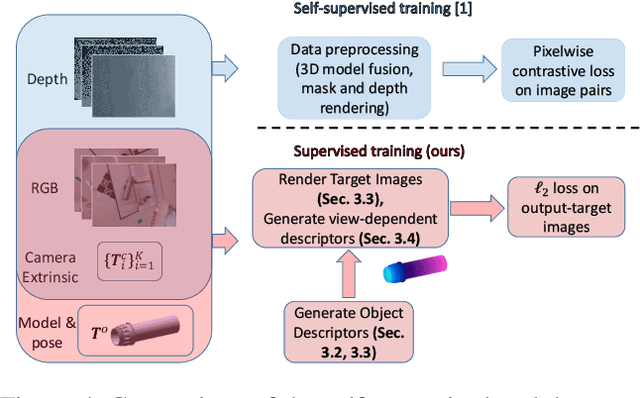
Dense Object Nets (DONs) by Florence, Manuelli and Tedrake (2018) introduced dense object descriptors as a novel visual object representation for the robotics community. It is suitable for many applications including object grasping, policy learning, etc. DONs map an RGB image depicting an object into a descriptor space image, which implicitly encodes key features of an object invariant to the relative camera pose. Impressively, the self-supervised training of DONs can be applied to arbitrary objects and can be evaluated and deployed within hours. However, the training approach relies on accurate depth images and faces challenges with small, reflective objects, typical for industrial settings, when using consumer grade depth cameras. In this paper we show that given a 3D model of an object, we can generate its descriptor space image, which allows for supervised training of DONs. We rely on Laplacian Eigenmaps (LE) to embed the 3D model of an object into an optimally generated space. While our approach uses more domain knowledge, it can be efficiently applied even for smaller and reflective objects, as it does not rely on depth information. We compare the training methods on generating 6D grasps for industrial objects and show that our novel supervised training approach improves the pick-and-place performance in industry-relevant tasks.