 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSupervised Training of Dense Object Nets using Optimal Descriptors for Industrial Robotic Applications
Feb 16, 2021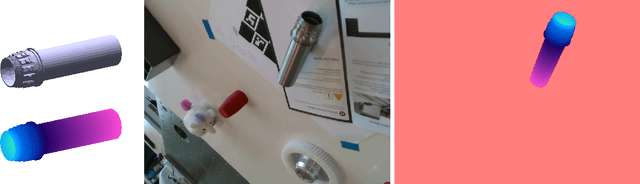

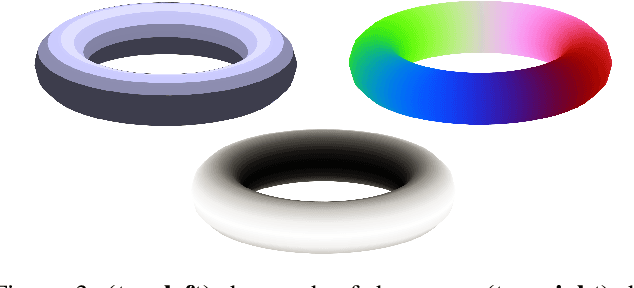
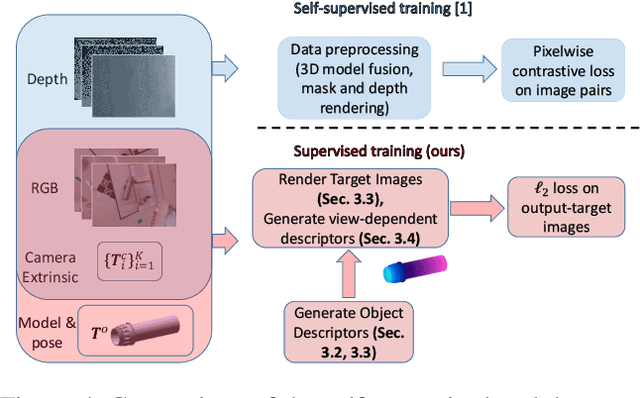
Dense Object Nets (DONs) by Florence, Manuelli and Tedrake (2018) introduced dense object descriptors as a novel visual object representation for the robotics community. It is suitable for many applications including object grasping, policy learning, etc. DONs map an RGB image depicting an object into a descriptor space image, which implicitly encodes key features of an object invariant to the relative camera pose. Impressively, the self-supervised training of DONs can be applied to arbitrary objects and can be evaluated and deployed within hours. However, the training approach relies on accurate depth images and faces challenges with small, reflective objects, typical for industrial settings, when using consumer grade depth cameras. In this paper we show that given a 3D model of an object, we can generate its descriptor space image, which allows for supervised training of DONs. We rely on Laplacian Eigenmaps (LE) to embed the 3D model of an object into an optimally generated space. While our approach uses more domain knowledge, it can be efficiently applied even for smaller and reflective objects, as it does not rely on depth information. We compare the training methods on generating 6D grasps for industrial objects and show that our novel supervised training approach improves the pick-and-place performance in industry-relevant tasks.
Learning and Sequencing of Object-Centric Manipulation Skills for Industrial Tasks
Aug 24, 2020
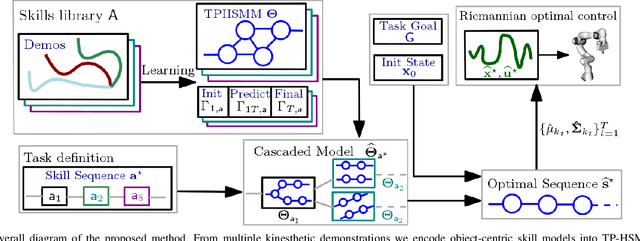
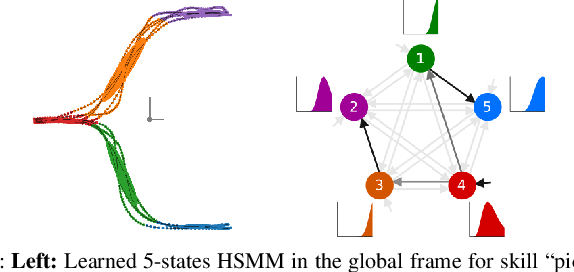

Enabling robots to quickly learn manipulation skills is an important, yet challenging problem. Such manipulation skills should be flexible, e.g., be able adapt to the current workspace configuration. Furthermore, to accomplish complex manipulation tasks, robots should be able to sequence several skills and adapt them to changing situations. In this work, we propose a rapid robot skill-sequencing algorithm, where the skills are encoded by object-centric hidden semi-Markov models. The learned skill models can encode multimodal (temporal and spatial) trajectory distributions. This approach significantly reduces manual modeling efforts, while ensuring a high degree of flexibility and re-usability of learned skills. Given a task goal and a set of generic skills, our framework computes smooth transitions between skill instances. To compute the corresponding optimal end-effector trajectory in task space we rely on Riemannian optimal controller. We demonstrate this approach on a 7 DoF robot arm for industrial assembly tasks.