 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthetic-to-Real Domain Bridging for Single-View 3D Reconstruction of Ships for Maritime Monitoring
Jan 29, 2026Three-dimensional (3D) reconstruction of ships is an important part of maritime monitoring, allowing improved visualization, inspection, and decision-making in real-world monitoring environments. However, most state-ofthe-art 3D reconstruction methods require multi-view supervision, annotated 3D ground truth, or are computationally intensive, making them impractical for real-time maritime deployment. In this work, we present an efficient pipeline for single-view 3D reconstruction of real ships by training entirely on synthetic data and requiring only a single view at inference. Our approach uses the Splatter Image network, which represents objects as sparse sets of 3D Gaussians for rapid and accurate reconstruction from single images. The model is first fine-tuned on synthetic ShapeNet vessels and further refined with a diverse custom dataset of 3D ships, bridging the domain gap between synthetic and real-world imagery. We integrate a state-of-the-art segmentation module based on YOLOv8 and custom preprocessing to ensure compatibility with the reconstruction network. Postprocessing steps include real-world scaling, centering, and orientation alignment, followed by georeferenced placement on an interactive web map using AIS metadata and homography-based mapping. Quantitative evaluation on synthetic validation data demonstrates strong reconstruction fidelity, while qualitative results on real maritime images from the ShipSG dataset confirm the potential for transfer to operational maritime settings. The final system provides interactive 3D inspection of real ships without requiring real-world 3D annotations. This pipeline provides an efficient, scalable solution for maritime monitoring and highlights a path toward real-time 3D ship visualization in practical applications. Interactive demo: https://dlr-mi.github.io/ship3d-demo/.
UTrack: Multi-Object Tracking with Uncertain Detections
Aug 30, 2024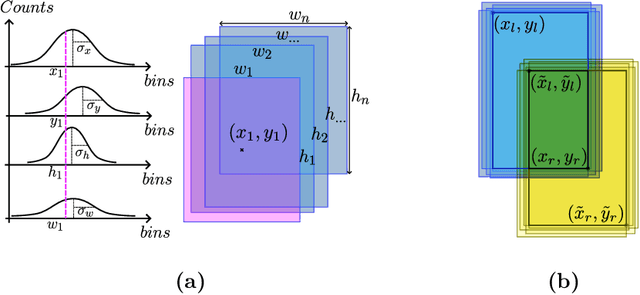
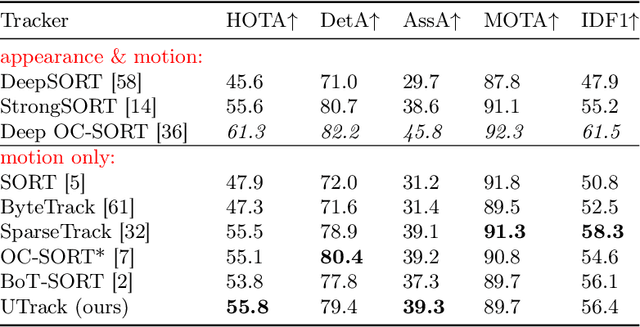
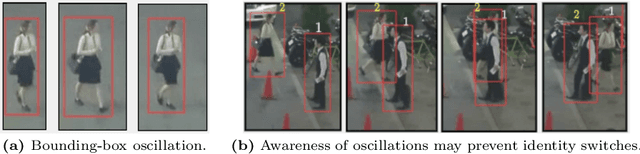
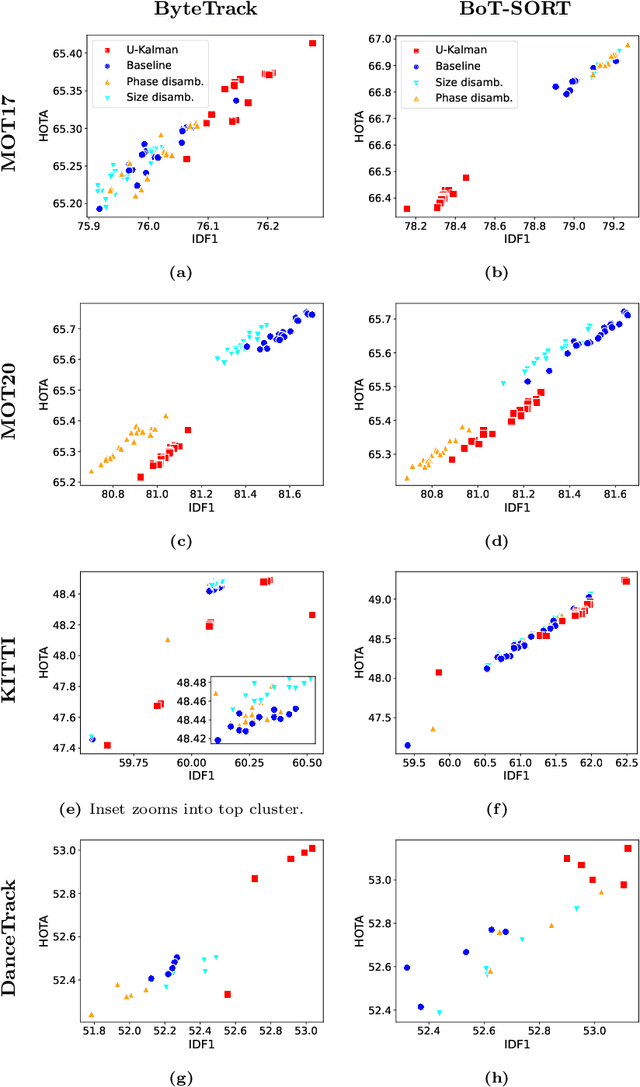
The tracking-by-detection paradigm is the mainstream in multi-object tracking, associating tracks to the predictions of an object detector. Although exhibiting uncertainty through a confidence score, these predictions do not capture the entire variability of the inference process. For safety and security critical applications like autonomous driving, surveillance, etc., knowing this predictive uncertainty is essential though. Therefore, we introduce, for the first time, a fast way to obtain the empirical predictive distribution during object detection and incorporate that knowledge in multi-object tracking. Our mechanism can easily be integrated into state-of-the-art trackers, enabling them to fully exploit the uncertainty in the detections. Additionally, novel association methods are introduced that leverage the proposed mechanism. We demonstrate the effectiveness of our contribution on a variety of benchmarks, such as MOT17, MOT20, DanceTrack, and KITTI.
The 2nd Workshop on Maritime Computer Vision 2024
Nov 23, 2023



The 2nd Workshop on Maritime Computer Vision (MaCVi) 2024 addresses maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicles (USV). Three challenges categories are considered: (i) UAV-based Maritime Object Tracking with Re-identification, (ii) USV-based Maritime Obstacle Segmentation and Detection, (iii) USV-based Maritime Boat Tracking. The USV-based Maritime Obstacle Segmentation and Detection features three sub-challenges, including a new embedded challenge addressing efficicent inference on real-world embedded devices. This report offers a comprehensive overview of the findings from the challenges. We provide both statistical and qualitative analyses, evaluating trends from over 195 submissions. All datasets, evaluation code, and the leaderboard are available to the public at https://macvi.org/workshop/macvi24.
Look ATME: The Discriminator Mean Entropy Needs Attention
Apr 18, 2023
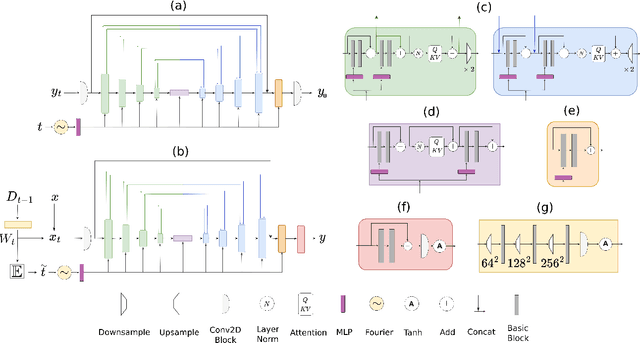
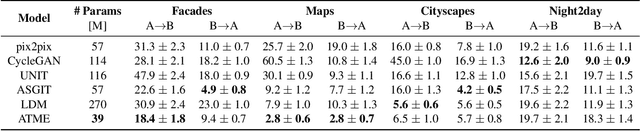
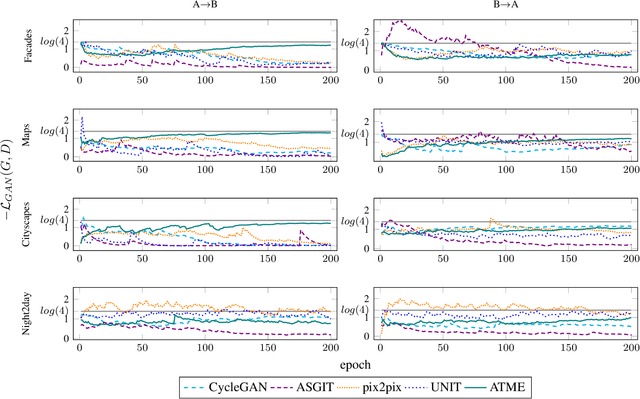
Generative adversarial networks (GANs) are successfully used for image synthesis but are known to face instability during training. In contrast, probabilistic diffusion models (DMs) are stable and generate high-quality images, at the cost of an expensive sampling procedure. In this paper, we introduce a simple method to allow GANs to stably converge to their theoretical optimum, while bringing in the denoising machinery from DMs. These models are combined into a simpler model (ATME) that only requires a forward pass during inference, making predictions cheaper and more accurate than DMs and popular GANs. ATME breaks an information asymmetry existing in most GAN models in which the discriminator has spatial knowledge of where the generator is failing. To restore the information symmetry, the generator is endowed with knowledge of the entropic state of the discriminator, which is leveraged to allow the adversarial game to converge towards equilibrium. We demonstrate the power of our method in several image-to-image translation tasks, showing superior performance than state-of-the-art methods at a lesser cost. Code is available at https://github.com/DLR-MI/atme