 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUTrack: Multi-Object Tracking with Uncertain Detections
Aug 30, 2024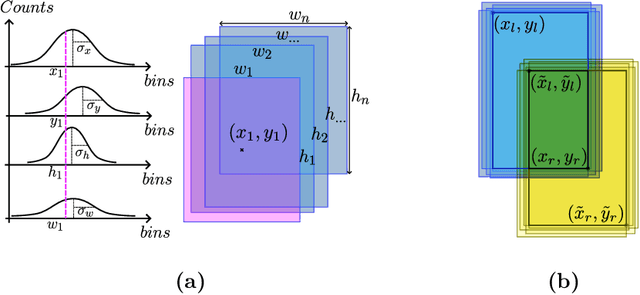
The tracking-by-detection paradigm is the mainstream in multi-object tracking, associating tracks to the predictions of an object detector. Although exhibiting uncertainty through a confidence score, these predictions do not capture the entire variability of the inference process. For safety and security critical applications like autonomous driving, surveillance, etc., knowing this predictive uncertainty is essential though. Therefore, we introduce, for the first time, a fast way to obtain the empirical predictive distribution during object detection and incorporate that knowledge in multi-object tracking. Our mechanism can easily be integrated into state-of-the-art trackers, enabling them to fully exploit the uncertainty in the detections. Additionally, novel association methods are introduced that leverage the proposed mechanism. We demonstrate the effectiveness of our contribution on a variety of benchmarks, such as MOT17, MOT20, DanceTrack, and KITTI.
The 2nd Workshop on Maritime Computer Vision 2024
Nov 23, 2023



The 2nd Workshop on Maritime Computer Vision (MaCVi) 2024 addresses maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicles (USV). Three challenges categories are considered: (i) UAV-based Maritime Object Tracking with Re-identification, (ii) USV-based Maritime Obstacle Segmentation and Detection, (iii) USV-based Maritime Boat Tracking. The USV-based Maritime Obstacle Segmentation and Detection features three sub-challenges, including a new embedded challenge addressing efficicent inference on real-world embedded devices. This report offers a comprehensive overview of the findings from the challenges. We provide both statistical and qualitative analyses, evaluating trends from over 195 submissions. All datasets, evaluation code, and the leaderboard are available to the public at https://macvi.org/workshop/macvi24.