 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUTrack: Multi-Object Tracking with Uncertain Detections
Aug 30, 2024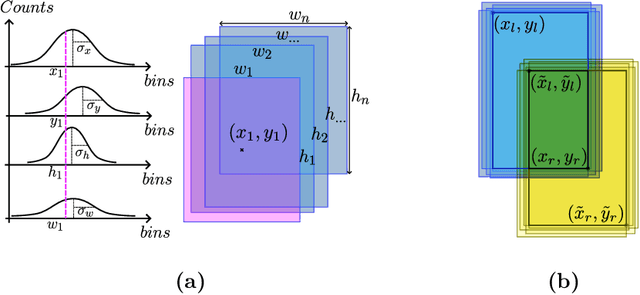
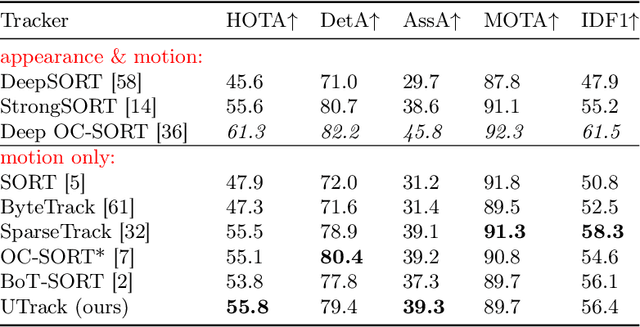
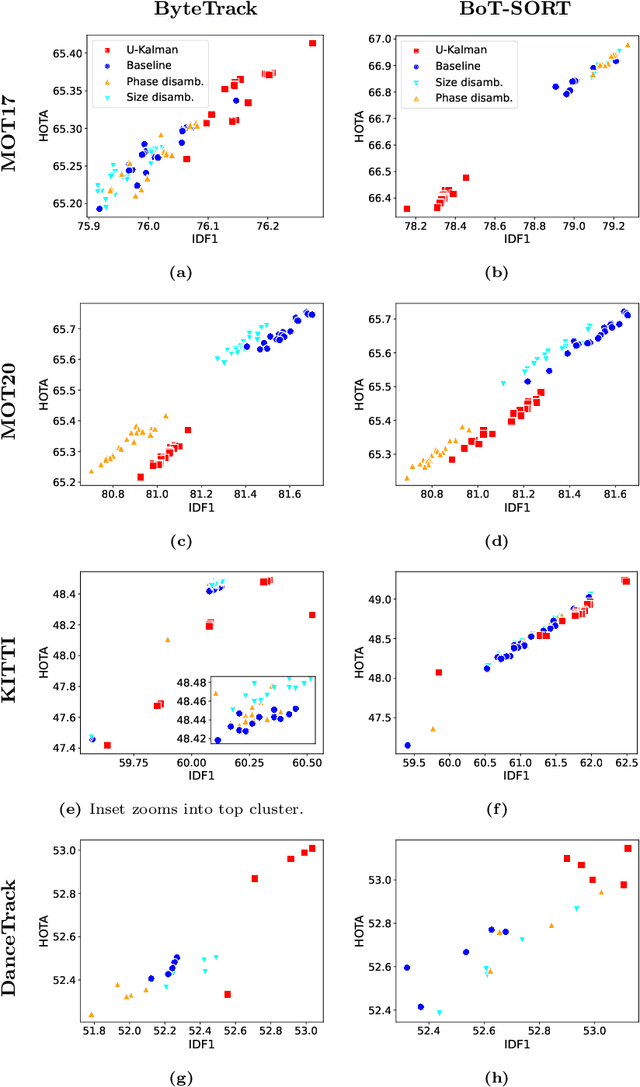
The tracking-by-detection paradigm is the mainstream in multi-object tracking, associating tracks to the predictions of an object detector. Although exhibiting uncertainty through a confidence score, these predictions do not capture the entire variability of the inference process. For safety and security critical applications like autonomous driving, surveillance, etc., knowing this predictive uncertainty is essential though. Therefore, we introduce, for the first time, a fast way to obtain the empirical predictive distribution during object detection and incorporate that knowledge in multi-object tracking. Our mechanism can easily be integrated into state-of-the-art trackers, enabling them to fully exploit the uncertainty in the detections. Additionally, novel association methods are introduced that leverage the proposed mechanism. We demonstrate the effectiveness of our contribution on a variety of benchmarks, such as MOT17, MOT20, DanceTrack, and KITTI.
The 2nd Workshop on Maritime Computer Vision 2024
Nov 23, 2023



The 2nd Workshop on Maritime Computer Vision (MaCVi) 2024 addresses maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicles (USV). Three challenges categories are considered: (i) UAV-based Maritime Object Tracking with Re-identification, (ii) USV-based Maritime Obstacle Segmentation and Detection, (iii) USV-based Maritime Boat Tracking. The USV-based Maritime Obstacle Segmentation and Detection features three sub-challenges, including a new embedded challenge addressing efficicent inference on real-world embedded devices. This report offers a comprehensive overview of the findings from the challenges. We provide both statistical and qualitative analyses, evaluating trends from over 195 submissions. All datasets, evaluation code, and the leaderboard are available to the public at https://macvi.org/workshop/macvi24.
Learning Representative Trajectories of Dynamical Systems via Domain-Adaptive Imitation
Apr 19, 2023Domain-adaptive trajectory imitation is a skill that some predators learn for survival, by mapping dynamic information from one domain (their speed and steering direction) to a different domain (current position of the moving prey). An intelligent agent with this skill could be exploited for a diversity of tasks, including the recognition of abnormal motion in traffic once it has learned to imitate representative trajectories. Towards this direction, we propose DATI, a deep reinforcement learning agent designed for domain-adaptive trajectory imitation using a cycle-consistent generative adversarial method. Our experiments on a variety of synthetic families of reference trajectories show that DATI outperforms baseline methods for imitation learning and optimal control in this setting, keeping the same per-task hyperparameters. Its generalization to a real-world scenario is shown through the discovery of abnormal motion patterns in maritime traffic, opening the door for the use of deep reinforcement learning methods for spatially-unconstrained trajectory data mining.
Look ATME: The Discriminator Mean Entropy Needs Attention
Apr 18, 2023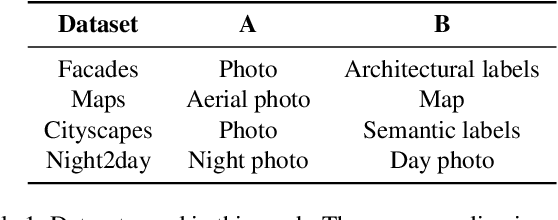
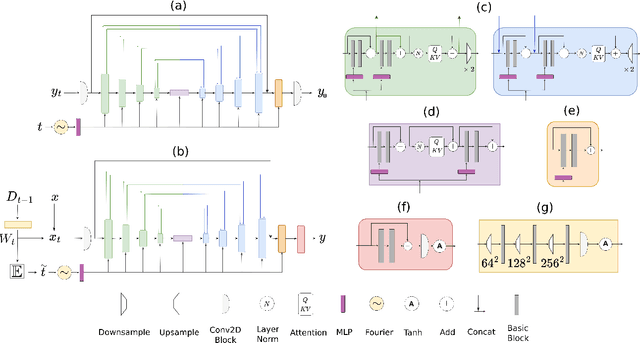
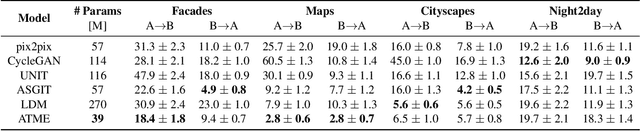
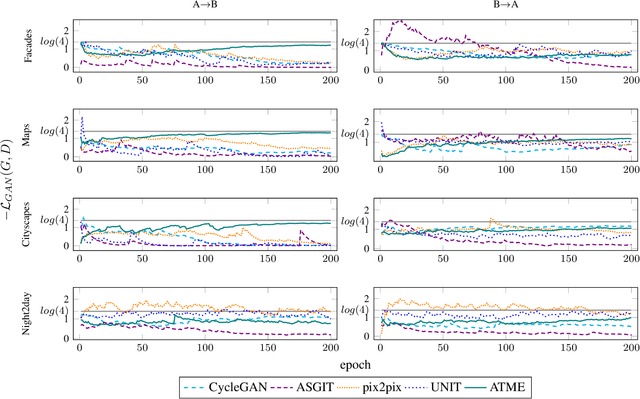
Generative adversarial networks (GANs) are successfully used for image synthesis but are known to face instability during training. In contrast, probabilistic diffusion models (DMs) are stable and generate high-quality images, at the cost of an expensive sampling procedure. In this paper, we introduce a simple method to allow GANs to stably converge to their theoretical optimum, while bringing in the denoising machinery from DMs. These models are combined into a simpler model (ATME) that only requires a forward pass during inference, making predictions cheaper and more accurate than DMs and popular GANs. ATME breaks an information asymmetry existing in most GAN models in which the discriminator has spatial knowledge of where the generator is failing. To restore the information symmetry, the generator is endowed with knowledge of the entropic state of the discriminator, which is leveraged to allow the adversarial game to converge towards equilibrium. We demonstrate the power of our method in several image-to-image translation tasks, showing superior performance than state-of-the-art methods at a lesser cost. Code is available at https://github.com/DLR-MI/atme
Can a single neuron learn quantiles?
Jun 07, 2021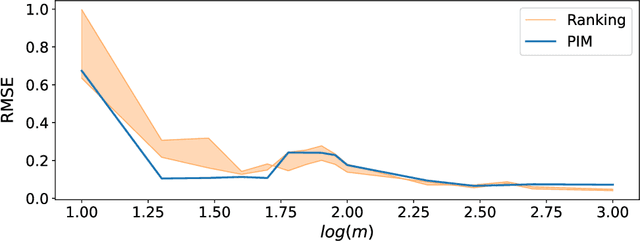
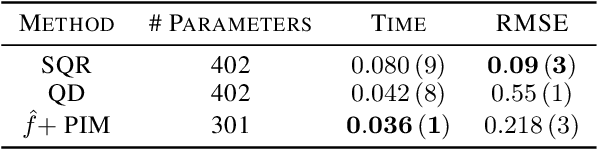
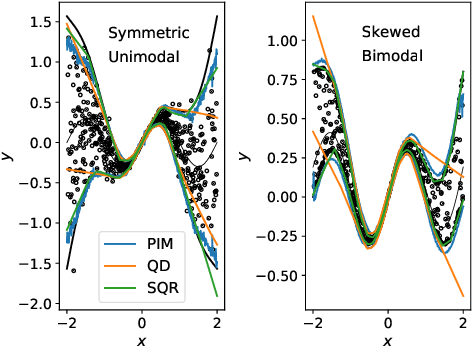
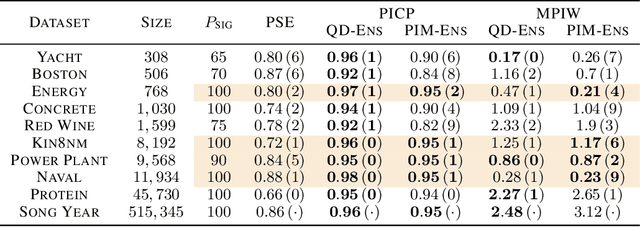
A novel non-parametric quantile estimation method for continuous random variables is introduced, based on a minimal neural network architecture consisting of a single unit. Its advantage over estimations from ranking the order statistics is shown, specifically for small sample size. In a regression context, the method can be used to quantify predictive uncertainty under the split conformal prediction setting, where prediction intervals are estimated from the residuals of a pre-trained model on a held-out validation set to quantify the uncertainty in future predictions. Benchmarking experiments demonstrate that the method is competitive in quality and coverage with state-of-the-art solutions, with the added benefit of being more computationally efficient.