 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArcFlow: Unleashing 2-Step Text-to-Image Generation via High-Precision Non-Linear Flow Distillation
Feb 09, 2026Diffusion models have achieved remarkable generation quality, but they suffer from significant inference cost due to their reliance on multiple sequential denoising steps, motivating recent efforts to distill this inference process into a few-step regime. However, existing distillation methods typically approximate the teacher trajectory by using linear shortcuts, which makes it difficult to match its constantly changing tangent directions as velocities evolve across timesteps, thereby leading to quality degradation. To address this limitation, we propose ArcFlow, a few-step distillation framework that explicitly employs non-linear flow trajectories to approximate pre-trained teacher trajectories. Concretely, ArcFlow parameterizes the velocity field underlying the inference trajectory as a mixture of continuous momentum processes. This enables ArcFlow to capture velocity evolution and extrapolate coherent velocities to form a continuous non-linear trajectory within each denoising step. Importantly, this parameterization admits an analytical integration of this non-linear trajectory, which circumvents numerical discretization errors and results in high-precision approximation of the teacher trajectory. To train this parameterization into a few-step generator, we implement ArcFlow via trajectory distillation on pre-trained teacher models using lightweight adapters. This strategy ensures fast, stable convergence while preserving generative diversity and quality. Built on large-scale models (Qwen-Image-20B and FLUX.1-dev), ArcFlow only fine-tunes on less than 5% of original parameters and achieves a 40x speedup with 2 NFEs over the original multi-step teachers without significant quality degradation. Experiments on benchmarks show the effectiveness of ArcFlow both qualitatively and quantitatively.
Optimizing Control-Friendly Trajectories with Self-Supervised Residual Learning
Jan 06, 2026Real-world physics can only be analytically modeled with a certain level of precision for modern intricate robotic systems. As a result, tracking aggressive trajectories accurately could be challenging due to the existence of residual physics during controller synthesis. This paper presents a self-supervised residual learning and trajectory optimization framework to address the aforementioned challenges. At first, unknown dynamic effects on the closed-loop model are learned and treated as residuals of the nominal dynamics, jointly forming a hybrid model. We show that learning with analytic gradients can be achieved using only trajectory-level data while enjoying accurate long-horizon prediction with an arbitrary integration step size. Subsequently, a trajectory optimizer is developed to compute the optimal reference trajectory with the residual physics along it minimized. It ends up with trajectories that are friendly to the following control level. The agile flight of quadrotors illustrates that by utilizing the hybrid dynamics, the proposed optimizer outputs aggressive motions that can be precisely tracked.
Unified Meta-Representation and Feedback Calibration for General Disturbance Estimation
Jan 06, 2026Precise control in modern robotic applications is always an open issue due to unknown time-varying disturbances. Existing meta-learning-based approaches require a shared representation of environmental structures, which lack flexibility for realistic non-structural disturbances. Besides, representation error and the distribution shifts can lead to heavy degradation in prediction accuracy. This work presents a generalizable disturbance estimation framework that builds on meta-learning and feedback-calibrated online adaptation. By extracting features from a finite time window of past observations, a unified representation that effectively captures general non-structural disturbances can be learned without predefined structural assumptions. The online adaptation process is subsequently calibrated by a state-feedback mechanism to attenuate the learning residual originating from the representation and generalizability limitations. Theoretical analysis shows that simultaneous convergence of both the online learning error and the disturbance estimation error can be achieved. Through the unified meta-representation, our framework effectively estimates multiple rapidly changing disturbances, as demonstrated by quadrotor flight experiments. See the project page for video, supplementary material and code: https://nonstructural-metalearn.github.io.
CorrectNav: Self-Correction Flywheel Empowers Vision-Language-Action Navigation Model
Aug 14, 2025Existing vision-and-language navigation models often deviate from the correct trajectory when executing instructions. However, these models lack effective error correction capability, hindering their recovery from errors. To address this challenge, we propose Self-correction Flywheel, a novel post-training paradigm. Instead of considering the model's error trajectories on the training set as a drawback, our paradigm emphasizes their significance as a valuable data source. We have developed a method to identify deviations in these error trajectories and devised innovative techniques to automatically generate self-correction data for perception and action. These self-correction data serve as fuel to power the model's continued training. The brilliance of our paradigm is revealed when we re-evaluate the model on the training set, uncovering new error trajectories. At this time, the self-correction flywheel begins to spin. Through multiple flywheel iterations, we progressively enhance our monocular RGB-based VLA navigation model CorrectNav. Experiments on R2R-CE and RxR-CE benchmarks show CorrectNav achieves new state-of-the-art success rates of 65.1% and 69.3%, surpassing prior best VLA navigation models by 8.2% and 16.4%. Real robot tests in various indoor and outdoor environments demonstrate \method's superior capability of error correction, dynamic obstacle avoidance, and long instruction following.
Accurate Control under Voltage Drop for Rotor Drones
Mar 12, 2025This letter proposes an anti-disturbance control scheme for rotor drones to counteract voltage drop (VD) disturbance caused by voltage drop of the battery, which is a common case for long-time flight or aggressive maneuvers. Firstly, the refined dynamics of rotor drones considering VD disturbance are presented. Based on the dynamics, a voltage drop observer (VDO) is developed to accurately estimate the VD disturbance by decoupling the disturbance and state information of the drone, reducing the conservativeness of conventional disturbance observers. Subsequently, the control scheme integrates the VDO within the translational loop and a fixed-time sliding mode observer (SMO) within the rotational loop, enabling it to address force and torque disturbances caused by voltage drop of the battery. Sufficient real flight experiments are conducted to demonstrate the effectiveness of the proposed control scheme under VD disturbance.
Feedback Favors the Generalization of Neural ODEs
Oct 14, 2024



The well-known generalization problem hinders the application of artificial neural networks in continuous-time prediction tasks with varying latent dynamics. In sharp contrast, biological systems can neatly adapt to evolving environments benefiting from real-time feedback mechanisms. Inspired by the feedback philosophy, we present feedback neural networks, showing that a feedback loop can flexibly correct the learned latent dynamics of neural ordinary differential equations (neural ODEs), leading to a prominent generalization improvement. The feedback neural network is a novel two-DOF neural network, which possesses robust performance in unseen scenarios with no loss of accuracy performance on previous tasks. A linear feedback form is presented to correct the learned latent dynamics firstly, with a convergence guarantee. Then, domain randomization is utilized to learn a nonlinear neural feedback form. Finally, extensive tests including trajectory prediction of a real irregular object and model predictive control of a quadrotor with various uncertainties, are implemented, indicating significant improvements over state-of-the-art model-based and learning-based methods.
ChemGymRL: An Interactive Framework for Reinforcement Learning for Digital Chemistry
May 23, 2023



This paper provides a simulated laboratory for making use of Reinforcement Learning (RL) for chemical discovery. Since RL is fairly data intensive, training agents `on-the-fly' by taking actions in the real world is infeasible and possibly dangerous. Moreover, chemical processing and discovery involves challenges which are not commonly found in RL benchmarks and therefore offer a rich space to work in. We introduce a set of highly customizable and open-source RL environments, ChemGymRL, based on the standard Open AI Gym template. ChemGymRL supports a series of interconnected virtual chemical benches where RL agents can operate and train. The paper introduces and details each of these benches using well-known chemical reactions as illustrative examples, and trains a set of standard RL algorithms in each of these benches. Finally, discussion and comparison of the performances of several standard RL methods are provided in addition to a list of directions for future work as a vision for the further development and usage of ChemGymRL.
Learning CLIP Guided Visual-Text Fusion Transformer for Video-based Pedestrian Attribute Recognition
Apr 20, 2023Existing pedestrian attribute recognition (PAR) algorithms are mainly developed based on a static image. However, the performance is not reliable for images with challenging factors, such as heavy occlusion, motion blur, etc. In this work, we propose to understand human attributes using video frames that can make full use of temporal information. Specifically, we formulate the video-based PAR as a vision-language fusion problem and adopt pre-trained big models CLIP to extract the feature embeddings of given video frames. To better utilize the semantic information, we take the attribute list as another input and transform the attribute words/phrase into the corresponding sentence via split, expand, and prompt. Then, the text encoder of CLIP is utilized for language embedding. The averaged visual tokens and text tokens are concatenated and fed into a fusion Transformer for multi-modal interactive learning. The enhanced tokens will be fed into a classification head for pedestrian attribute prediction. Extensive experiments on a large-scale video-based PAR dataset fully validated the effectiveness of our proposed framework.
Low-Cost Beamforming and DOA Estimation Based on One-Bit Reconfigurable Intelligent Surface
Nov 15, 2022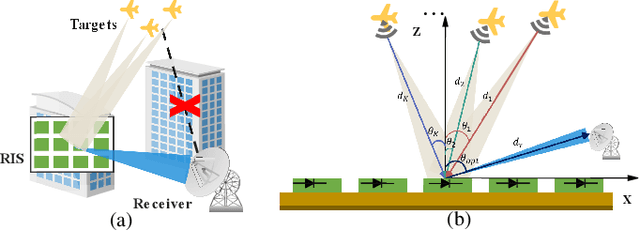
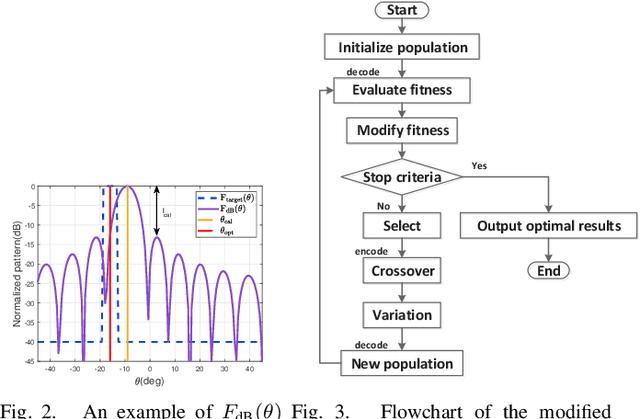
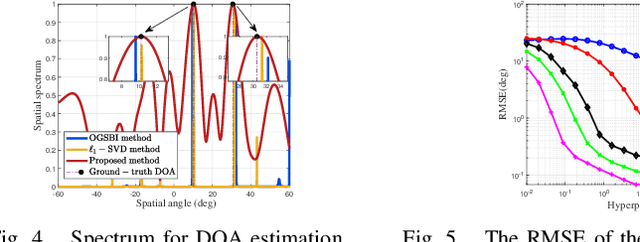
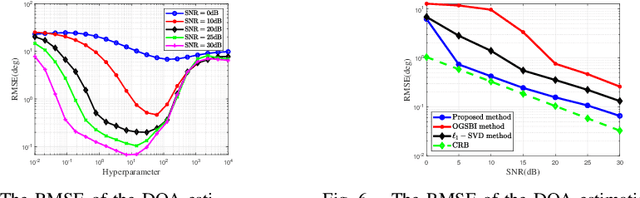
In this work, we consider the Direction-of-Arrival (DOA) estimation problem in a low-cost architecture where only one antenna as the receiver is aided by a reconfigurable intelligent surface (RIS). We introduce the one-bit RIS as a signal reflector to enhance signal transmission in non-line-of-sight (NLOS) situations and substantially simplify the physical hardware for DOA estimation. We optimize the beamforming scheme called measurement matrix to focus the echo power on the receiver with the coarse localization information of the targets as the prior. A beamforming scheme based on the modified genetic algorithm is proposed to optimize the measurement matrix, guaranteeing restricted isometry property (RIP) and meeting single beamforming requirements. The DOA results are finely estimated by solving an atomic-norm based sparse reconstruction problem. Simulation results show that the proposed method outperforms the existing methods in the DOA estimation performance.
* 5 pages, 8 figures
A Survey of Automated Data Augmentation Algorithms for Deep Learning-based Image Classication Tasks
Jun 14, 2022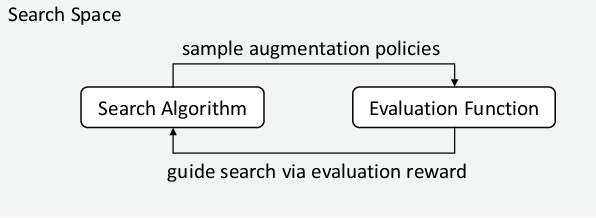
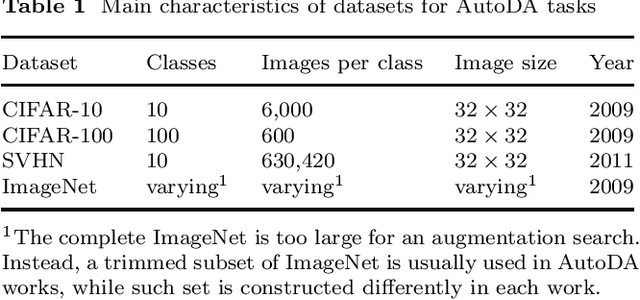
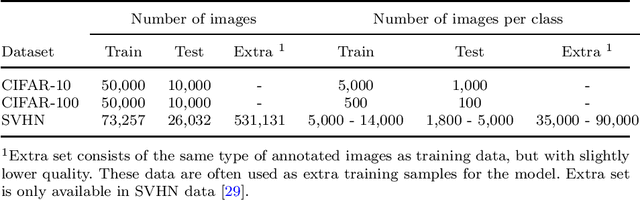
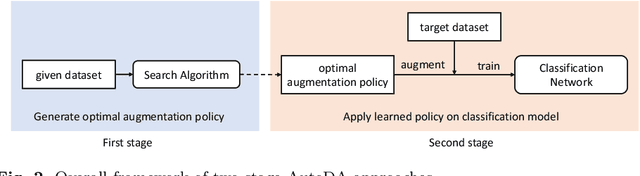
In recent years, one of the most popular techniques in the computer vision community has been the deep learning technique. As a data-driven technique, deep model requires enormous amounts of accurately labelled training data, which is often inaccessible in many real-world applications. A data-space solution is Data Augmentation (DA), that can artificially generate new images out of original samples. Image augmentation strategies can vary by dataset, as different data types might require different augmentations to facilitate model training. However, the design of DA policies has been largely decided by the human experts with domain knowledge, which is considered to be highly subjective and error-prone. To mitigate such problem, a novel direction is to automatically learn the image augmentation policies from the given dataset using Automated Data Augmentation (AutoDA) techniques. The goal of AutoDA models is to find the optimal DA policies that can maximize the model performance gains. This survey discusses the underlying reasons of the emergence of AutoDA technology from the perspective of image classification. We identify three key components of a standard AutoDA model: a search space, a search algorithm and an evaluation function. Based on their architecture, we provide a systematic taxonomy of existing image AutoDA approaches. This paper presents the major works in AutoDA field, discussing their pros and cons, and proposing several potential directions for future improvements.