 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnified Meta-Representation and Feedback Calibration for General Disturbance Estimation
Jan 06, 2026Precise control in modern robotic applications is always an open issue due to unknown time-varying disturbances. Existing meta-learning-based approaches require a shared representation of environmental structures, which lack flexibility for realistic non-structural disturbances. Besides, representation error and the distribution shifts can lead to heavy degradation in prediction accuracy. This work presents a generalizable disturbance estimation framework that builds on meta-learning and feedback-calibrated online adaptation. By extracting features from a finite time window of past observations, a unified representation that effectively captures general non-structural disturbances can be learned without predefined structural assumptions. The online adaptation process is subsequently calibrated by a state-feedback mechanism to attenuate the learning residual originating from the representation and generalizability limitations. Theoretical analysis shows that simultaneous convergence of both the online learning error and the disturbance estimation error can be achieved. Through the unified meta-representation, our framework effectively estimates multiple rapidly changing disturbances, as demonstrated by quadrotor flight experiments. See the project page for video, supplementary material and code: https://nonstructural-metalearn.github.io.
Optimizing Control-Friendly Trajectories with Self-Supervised Residual Learning
Jan 06, 2026Real-world physics can only be analytically modeled with a certain level of precision for modern intricate robotic systems. As a result, tracking aggressive trajectories accurately could be challenging due to the existence of residual physics during controller synthesis. This paper presents a self-supervised residual learning and trajectory optimization framework to address the aforementioned challenges. At first, unknown dynamic effects on the closed-loop model are learned and treated as residuals of the nominal dynamics, jointly forming a hybrid model. We show that learning with analytic gradients can be achieved using only trajectory-level data while enjoying accurate long-horizon prediction with an arbitrary integration step size. Subsequently, a trajectory optimizer is developed to compute the optimal reference trajectory with the residual physics along it minimized. It ends up with trajectories that are friendly to the following control level. The agile flight of quadrotors illustrates that by utilizing the hybrid dynamics, the proposed optimizer outputs aggressive motions that can be precisely tracked.
Accurate Control under Voltage Drop for Rotor Drones
Mar 12, 2025This letter proposes an anti-disturbance control scheme for rotor drones to counteract voltage drop (VD) disturbance caused by voltage drop of the battery, which is a common case for long-time flight or aggressive maneuvers. Firstly, the refined dynamics of rotor drones considering VD disturbance are presented. Based on the dynamics, a voltage drop observer (VDO) is developed to accurately estimate the VD disturbance by decoupling the disturbance and state information of the drone, reducing the conservativeness of conventional disturbance observers. Subsequently, the control scheme integrates the VDO within the translational loop and a fixed-time sliding mode observer (SMO) within the rotational loop, enabling it to address force and torque disturbances caused by voltage drop of the battery. Sufficient real flight experiments are conducted to demonstrate the effectiveness of the proposed control scheme under VD disturbance.
Feedback Favors the Generalization of Neural ODEs
Oct 14, 2024



The well-known generalization problem hinders the application of artificial neural networks in continuous-time prediction tasks with varying latent dynamics. In sharp contrast, biological systems can neatly adapt to evolving environments benefiting from real-time feedback mechanisms. Inspired by the feedback philosophy, we present feedback neural networks, showing that a feedback loop can flexibly correct the learned latent dynamics of neural ordinary differential equations (neural ODEs), leading to a prominent generalization improvement. The feedback neural network is a novel two-DOF neural network, which possesses robust performance in unseen scenarios with no loss of accuracy performance on previous tasks. A linear feedback form is presented to correct the learned latent dynamics firstly, with a convergence guarantee. Then, domain randomization is utilized to learn a nonlinear neural feedback form. Finally, extensive tests including trajectory prediction of a real irregular object and model predictive control of a quadrotor with various uncertainties, are implemented, indicating significant improvements over state-of-the-art model-based and learning-based methods.
Disturbance Observer for Estimating Coupled Disturbances
Jul 18, 2024


High-precision control for nonlinear systems is impeded by the low-fidelity dynamical model and external disturbance. Especially, the intricate coupling between internal uncertainty and external disturbance is usually difficult to be modeled explicitly. Here we show an effective and convergent algorithm enabling accurate estimation of the coupled disturbance via combining control and learning philosophies. Specifically, by resorting to Chebyshev series expansion, the coupled disturbance is firstly decomposed into an unknown parameter matrix and two known structures depending on system state and external disturbance respectively. A Regularized Least Squares (RLS) algorithm is subsequently formalized to learn the parameter matrix by using historical time-series data. Finally, a higher-order disturbance observer (HODO) is developed to achieve a high-precision estimation of the coupled disturbance by utilizing the learned portion. The efficiency of the proposed algorithm is evaluated through extensive simulations. We believe this work can offer a new option to merge learning schemes into the control framework for addressing existing intractable control problems.
Mobile Formation Coordination and Tracking Control for Multiple Non-holonomic Vehicles
Feb 28, 2019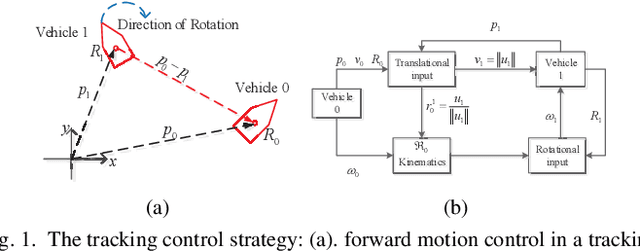



This paper addresses forward motion control for trajectory tracking and mobile formation coordination for a group of non-holonomic vehicles on SE(2). Firstly, by constructing an intermediate attitude variable which involves vehicles' position information and desired attitude, the translational and rotational control inputs are designed in two stages to solve the trajectory tracking problem. Secondly, the coordination relationships of relative positions and headings are explored thoroughly for a group of non-holonomic vehicles to maintain a mobile formation with rigid body motion constraints. We prove that, except for the cases of parallel formation and translational straight line formation, a mobile formation with strict rigid-body motion can be achieved if and only if the ratios of linear speed to angular speed for each individual vehicle are constants. Motion properties for mobile formation with weak rigid-body motion are also demonstrated. Thereafter, based on the proposed trajectory tracking approach, a distributed mobile formation control law is designed under a directed tree graph. The performance of the proposed controllers is validated by both numerical simulations and experiments.
Robust Target-relative Localization with Ultra-Wideband Ranging and Communication
May 31, 2018



In this paper we propose a method to achieve relative positioning and tracking of a target by a quadcopter using Ultra-wideband (UWB) ranging sensors, which are strategically installed to help retrieve both relative position and bearing between the quadcopter and target. To achieve robust localization for autonomous flight even with uncertainty in the speed of the target, two main features are developed. First, an estimator based on Extended Kalman Filter (EKF) is developed to fuse UWB ranging measurements with data from onboard sensors including inertial measurement unit (IMU), altimeters and optical flow. Second, to properly handle the coupling of the target's orientation with the range measurements, UWB based communication capability is utilized to transfer the target's orientation to the quadcopter. Experiment results demonstrate the ability of the quadcopter to control its position relative to the target autonomously in both cases when the target is static and moving.
* 2018 International Conference on Robotics and Automation (ICRA 2018)