 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobile Formation Coordination and Tracking Control for Multiple Non-holonomic Vehicles
Paper and Code
Feb 28, 2019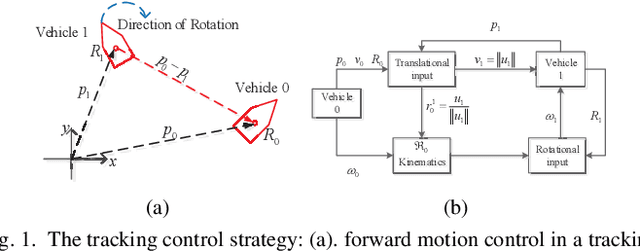



This paper addresses forward motion control for trajectory tracking and mobile formation coordination for a group of non-holonomic vehicles on SE(2). Firstly, by constructing an intermediate attitude variable which involves vehicles' position information and desired attitude, the translational and rotational control inputs are designed in two stages to solve the trajectory tracking problem. Secondly, the coordination relationships of relative positions and headings are explored thoroughly for a group of non-holonomic vehicles to maintain a mobile formation with rigid body motion constraints. We prove that, except for the cases of parallel formation and translational straight line formation, a mobile formation with strict rigid-body motion can be achieved if and only if the ratios of linear speed to angular speed for each individual vehicle are constants. Motion properties for mobile formation with weak rigid-body motion are also demonstrated. Thereafter, based on the proposed trajectory tracking approach, a distributed mobile formation control law is designed under a directed tree graph. The performance of the proposed controllers is validated by both numerical simulations and experiments.