 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmark Datasets for Lead-Lag Forecasting on Social Platforms
Nov 05, 2025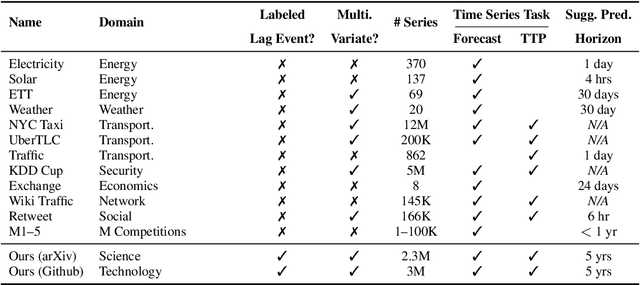
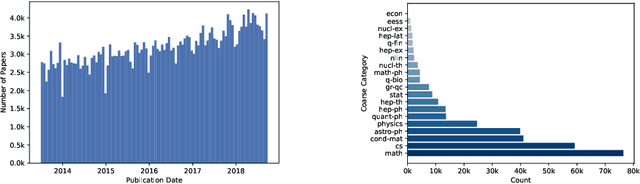
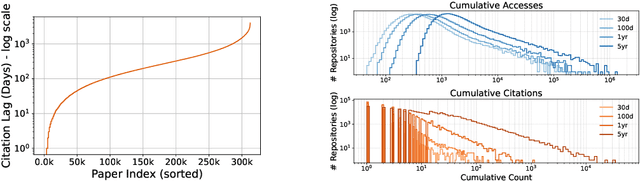
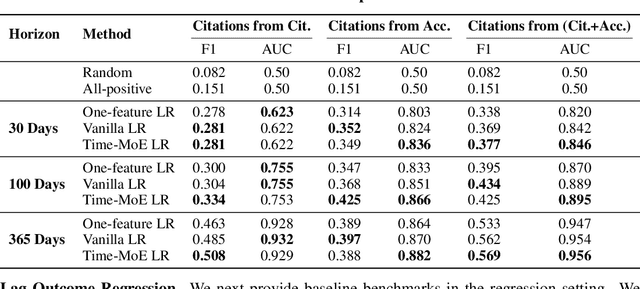
Social and collaborative platforms emit multivariate time-series traces in which early interactions-such as views, likes, or downloads-are followed, sometimes months or years later, by higher impact like citations, sales, or reviews. We formalize this setting as Lead-Lag Forecasting (LLF): given an early usage channel (the lead), predict a correlated but temporally shifted outcome channel (the lag). Despite the ubiquity of such patterns, LLF has not been treated as a unified forecasting problem within the time-series community, largely due to the absence of standardized datasets. To anchor research in LLF, here we present two high-volume benchmark datasets-arXiv (accesses -> citations of 2.3M papers) and GitHub (pushes/stars -> forks of 3M repositories)-and outline additional domains with analogous lead-lag dynamics, including Wikipedia (page views -> edits), Spotify (streams -> concert attendance), e-commerce (click-throughs -> purchases), and LinkedIn profile (views -> messages). Our datasets provide ideal testbeds for lead-lag forecasting, by capturing long-horizon dynamics across years, spanning the full spectrum of outcomes, and avoiding survivorship bias in sampling. We documented all technical details of data curation and cleaning, verified the presence of lead-lag dynamics through statistical and classification tests, and benchmarked parametric and non-parametric baselines for regression. Our study establishes LLF as a novel forecasting paradigm and lays an empirical foundation for its systematic exploration in social and usage data. Our data portal with downloads and documentation is available at https://lead-lag-forecasting.github.io/.
Mixed Signals: A Diverse Point Cloud Dataset for Heterogeneous LiDAR V2X Collaboration
Feb 19, 2025Vehicle-to-everything (V2X) collaborative perception has emerged as a promising solution to address the limitations of single-vehicle perception systems. However, existing V2X datasets are limited in scope, diversity, and quality. To address these gaps, we present Mixed Signals, a comprehensive V2X dataset featuring 45.1k point clouds and 240.6k bounding boxes collected from three connected autonomous vehicles (CAVs) equipped with two different types of LiDAR sensors, plus a roadside unit with dual LiDARs. Our dataset provides precisely aligned point clouds and bounding box annotations across 10 classes, ensuring reliable data for perception training. We provide detailed statistical analysis on the quality of our dataset and extensively benchmark existing V2X methods on it. Mixed Signals V2X Dataset is one of the highest quality, large-scale datasets publicly available for V2X perception research. Details on the website https://mixedsignalsdataset.cs.cornell.edu/.
DiffuBox: Refining 3D Object Detection with Point Diffusion
May 25, 2024

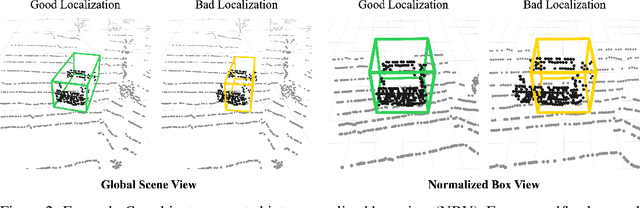

Ensuring robust 3D object detection and localization is crucial for many applications in robotics and autonomous driving. Recent models, however, face difficulties in maintaining high performance when applied to domains with differing sensor setups or geographic locations, often resulting in poor localization accuracy due to domain shift. To overcome this challenge, we introduce a novel diffusion-based box refinement approach. This method employs a domain-agnostic diffusion model, conditioned on the LiDAR points surrounding a coarse bounding box, to simultaneously refine the box's location, size, and orientation. We evaluate this approach under various domain adaptation settings, and our results reveal significant improvements across different datasets, object classes and detectors.
Zero-shot Object-Level OOD Detection with Context-Aware Inpainting
Feb 07, 2024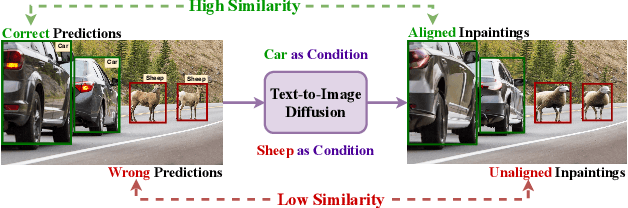
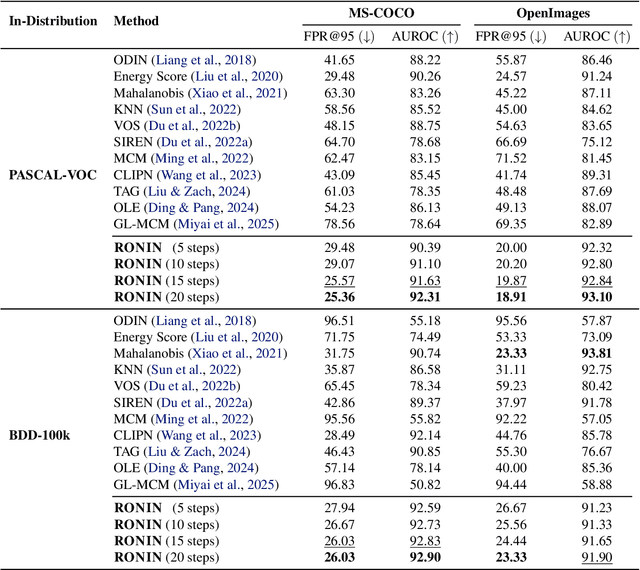


Machine learning algorithms are increasingly provided as black-box cloud services or pre-trained models, without access to their training data. This motivates the problem of zero-shot out-of-distribution (OOD) detection. Concretely, we aim to detect OOD objects that do not belong to the classifier's label set but are erroneously classified as in-distribution (ID) objects. Our approach, RONIN, uses an off-the-shelf diffusion model to replace detected objects with inpainting. RONIN conditions the inpainting process with the predicted ID label, drawing the input object closer to the in-distribution domain. As a result, the reconstructed object is very close to the original in the ID cases and far in the OOD cases, allowing RONIN to effectively distinguish ID and OOD samples. Throughout extensive experiments, we demonstrate that RONIN achieves competitive results compared to previous approaches across several datasets, both in zero-shot and non-zero-shot settings.
Reward Finetuning for Faster and More Accurate Unsupervised Object Discovery
Nov 05, 2023



Recent advances in machine learning have shown that Reinforcement Learning from Human Feedback (RLHF) can improve machine learning models and align them with human preferences. Although very successful for Large Language Models (LLMs), these advancements have not had a comparable impact in research for autonomous vehicles -- where alignment with human expectations can be imperative. In this paper, we propose to adapt similar RL-based methods to unsupervised object discovery, i.e. learning to detect objects from LiDAR points without any training labels. Instead of labels, we use simple heuristics to mimic human feedback. More explicitly, we combine multiple heuristics into a simple reward function that positively correlates its score with bounding box accuracy, i.e., boxes containing objects are scored higher than those without. We start from the detector's own predictions to explore the space and reinforce boxes with high rewards through gradient updates. Empirically, we demonstrate that our approach is not only more accurate, but also orders of magnitudes faster to train compared to prior works on object discovery.
Correction with Backtracking Reduces Hallucination in Summarization
Oct 31, 2023
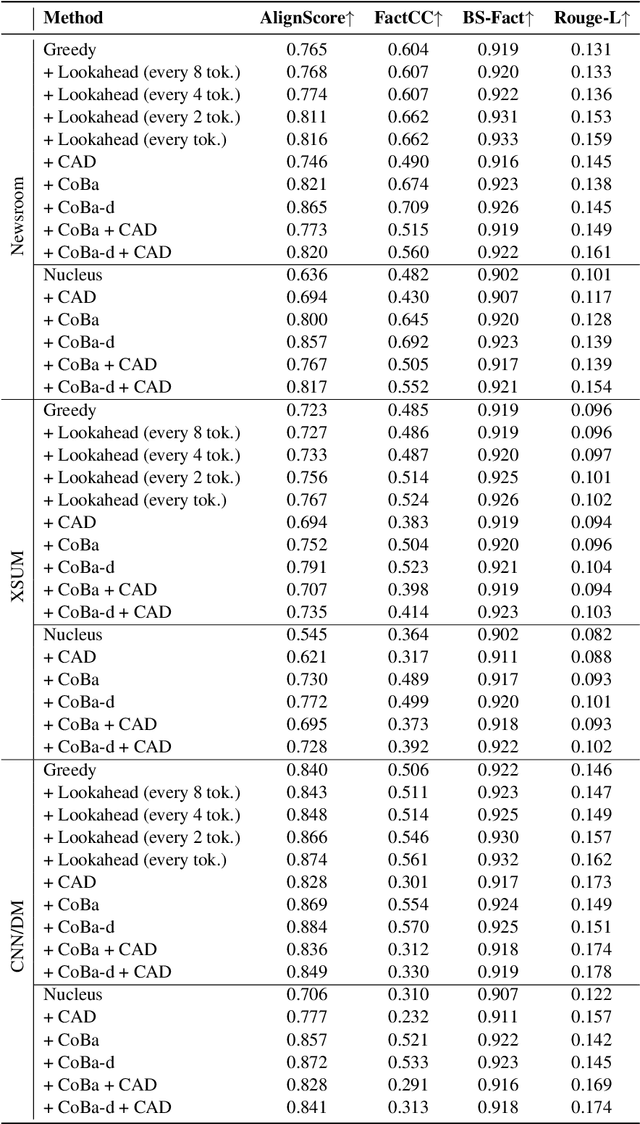


Abstractive summarization aims at generating natural language summaries of a source document that are succinct while preserving the important elements. Despite recent advances, neural text summarization models are known to be susceptible to hallucinating (or more correctly confabulating), that is to produce summaries with details that are not grounded in the source document. In this paper, we introduce a simple yet efficient technique, CoBa, to reduce hallucination in abstractive summarization. The approach is based on two steps: hallucination detection and mitigation. We show that the former can be achieved through measuring simple statistics about conditional word probabilities and distance to context words. Further, we demonstrate that straight-forward backtracking is surprisingly effective at mitigation. We thoroughly evaluate the proposed method with prior art on three benchmark datasets for text summarization. The results show that CoBa is effective and efficient in reducing hallucination, and offers great adaptability and flexibility.
Unsupervised Out-of-Distribution Detection with Diffusion Inpainting
Feb 20, 2023Unsupervised out-of-distribution detection (OOD) seeks to identify out-of-domain data by learning only from unlabeled in-domain data. We present a novel approach for this task - Lift, Map, Detect (LMD) - that leverages recent advancement in diffusion models. Diffusion models are one type of generative models. At their core, they learn an iterative denoising process that gradually maps a noisy image closer to their training manifolds. LMD leverages this intuition for OOD detection. Specifically, LMD lifts an image off its original manifold by corrupting it, and maps it towards the in-domain manifold with a diffusion model. For an out-of-domain image, the mapped image would have a large distance away from its original manifold, and LMD would identify it as OOD accordingly. We show through extensive experiments that LMD achieves competitive performance across a broad variety of datasets.