 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMixed Signals: A Diverse Point Cloud Dataset for Heterogeneous LiDAR V2X Collaboration
Feb 19, 2025Vehicle-to-everything (V2X) collaborative perception has emerged as a promising solution to address the limitations of single-vehicle perception systems. However, existing V2X datasets are limited in scope, diversity, and quality. To address these gaps, we present Mixed Signals, a comprehensive V2X dataset featuring 45.1k point clouds and 240.6k bounding boxes collected from three connected autonomous vehicles (CAVs) equipped with two different types of LiDAR sensors, plus a roadside unit with dual LiDARs. Our dataset provides precisely aligned point clouds and bounding box annotations across 10 classes, ensuring reliable data for perception training. We provide detailed statistical analysis on the quality of our dataset and extensively benchmark existing V2X methods on it. Mixed Signals V2X Dataset is one of the highest quality, large-scale datasets publicly available for V2X perception research. Details on the website https://mixedsignalsdataset.cs.cornell.edu/.
A Novel Multi-Teacher Knowledge Distillation for Real-Time Object Detection using 4D Radar
Feb 10, 2025



Accurate 3D object detection is crucial for safe autonomous navigation, requiring reliable performance across diverse weather conditions. While LiDAR performance deteriorates in challenging weather, Radar systems maintain their reliability. Traditional Radars have limitations due to their lack of elevation data, but the recent 4D Radars overcome this by measuring elevation alongside range, azimuth, and Doppler velocity, making them invaluable for autonomous vehicles. The primary challenge in utilizing 4D Radars is the sparsity of their point clouds. Previous works address this by developing architectures that better capture semantics and context in sparse point cloud, largely drawing from LiDAR-based approaches. However, these methods often overlook a unique advantage of 4D Radars: the dense Radar tensor, which encapsulates power measurements across three spatial dimensions and the Doppler dimension. Our paper leverages this tensor to tackle the sparsity issue. We introduce a novel knowledge distillation framework that enables a student model to densify its sparse input in the latent space by emulating an ensemble of teacher models. Our experiments demonstrate a 25% performance improvement over the state-of-the-art RTNH model on the K-Radar dataset. Notably, this improvement is achieved while still maintaining a real-time inference speed.
Label-Efficient 3D Object Detection For Road-Side Units
Apr 09, 2024



Occlusion presents a significant challenge for safety-critical applications such as autonomous driving. Collaborative perception has recently attracted a large research interest thanks to the ability to enhance the perception of autonomous vehicles via deep information fusion with intelligent roadside units (RSU), thus minimizing the impact of occlusion. While significant advancement has been made, the data-hungry nature of these methods creates a major hurdle for their real-world deployment, particularly due to the need for annotated RSU data. Manually annotating the vast amount of RSU data required for training is prohibitively expensive, given the sheer number of intersections and the effort involved in annotating point clouds. We address this challenge by devising a label-efficient object detection method for RSU based on unsupervised object discovery. Our paper introduces two new modules: one for object discovery based on a spatial-temporal aggregation of point clouds, and another for refinement. Furthermore, we demonstrate that fine-tuning on a small portion of annotated data allows our object discovery models to narrow the performance gap with, or even surpass, fully supervised models. Extensive experiments are carried out in simulated and real-world datasets to evaluate our method.
Practical Collaborative Perception: A Framework for Asynchronous and Multi-Agent 3D Object Detection
Jul 09, 2023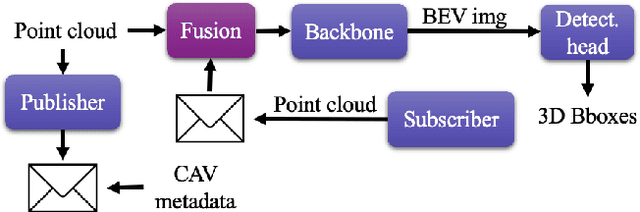
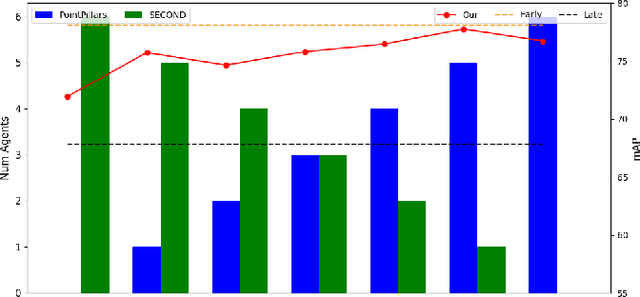
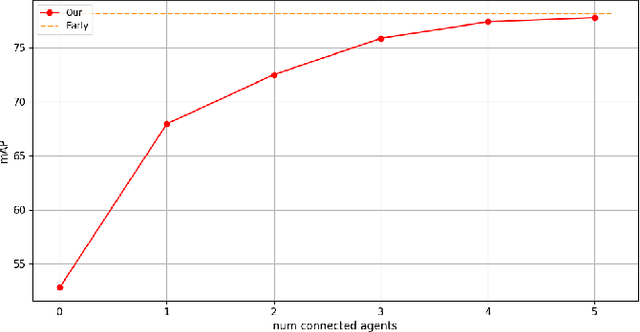
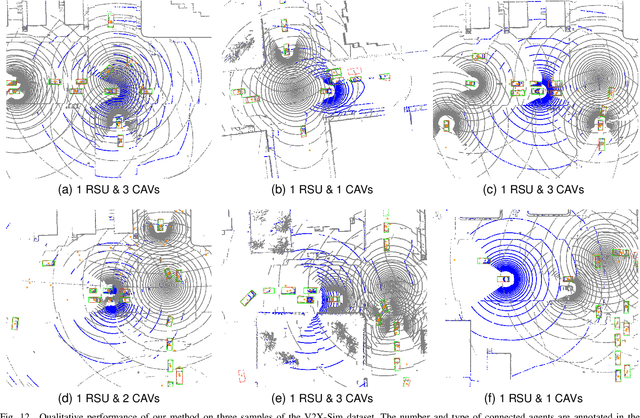
Occlusion is a major challenge for LiDAR-based object detection methods. This challenge becomes safety-critical in urban traffic where the ego vehicle must have reliable object detection to avoid collision while its field of view is severely reduced due to the obstruction posed by a large number of road users. Collaborative perception via Vehicle-to-Everything (V2X) communication, which leverages the diverse perspective thanks to the presence at multiple locations of connected agents to form a complete scene representation, is an appealing solution. State-of-the-art V2X methods resolve the performance-bandwidth tradeoff using a mid-collaboration approach where the Bird-Eye View images of point clouds are exchanged so that the bandwidth consumption is lower than communicating point clouds as in early collaboration, and the detection performance is higher than late collaboration, which fuses agents' output, thanks to a deeper interaction among connected agents. While achieving strong performance, the real-world deployment of most mid-collaboration approaches is hindered by their overly complicated architectures, involving learnable collaboration graphs and autoencoder-based compressor/ decompressor, and unrealistic assumptions about inter-agent synchronization. In this work, we devise a simple yet effective collaboration method that achieves a better bandwidth-performance tradeoff than prior state-of-the-art methods while minimizing changes made to the single-vehicle detection models and relaxing unrealistic assumptions on inter-agent synchronization. Experiments on the V2X-Sim dataset show that our collaboration method achieves 98\% of the performance of an early-collaboration method, while only consuming the equivalent bandwidth of a late-collaboration method.
Aligning Bird-Eye View Representation of Point Cloud Sequences using Scene Flow
May 04, 2023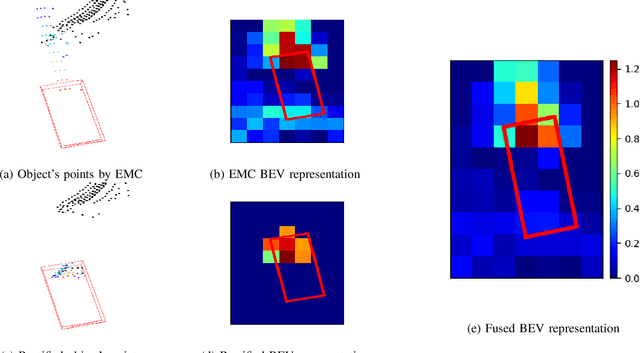
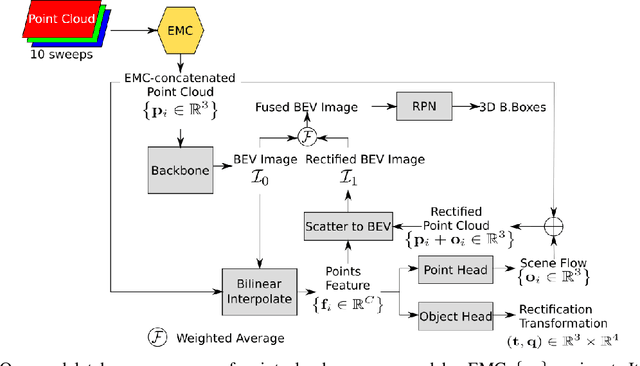
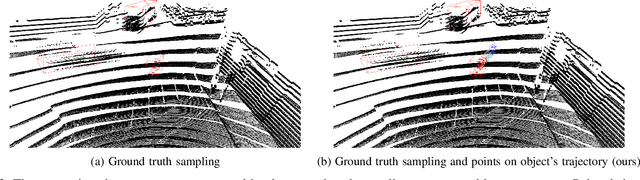
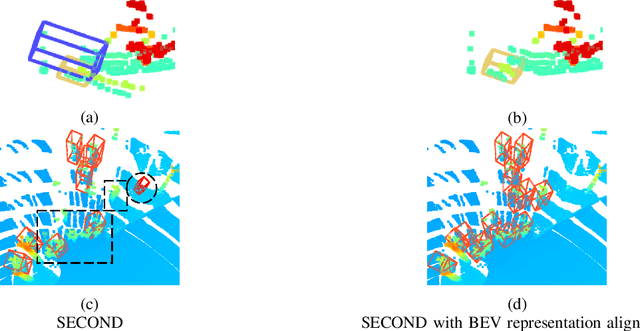
Low-resolution point clouds are challenging for object detection methods due to their sparsity. Densifying the present point cloud by concatenating it with its predecessors is a popular solution to this challenge. Such concatenation is possible thanks to the removal of ego vehicle motion using its odometry. This method is called Ego Motion Compensation (EMC). Thanks to the added points, EMC significantly improves the performance of single-frame detectors. However, it suffers from the shadow effect that manifests in dynamic objects' points scattering along their trajectories. This effect results in a misalignment between feature maps and objects' locations, thus limiting performance improvement to stationary and slow-moving objects only. Scene flow allows aligning point clouds in 3D space, thus naturally resolving the misalignment in feature spaces. By observing that scene flow computation shares several components with 3D object detection pipelines, we develop a plug-in module that enables single-frame detectors to compute scene flow to rectify their Bird-Eye View representation. Experiments on the NuScenes dataset show that our module leads to a significant increase (up to 16%) in the Average Precision of large vehicles, which interestingly demonstrates the most severe shadow effect. The code is published at https://github.com/quan-dao/pc-corrector.
3D-FlowNet: Event-based optical flow estimation with 3D representation
Jan 28, 2022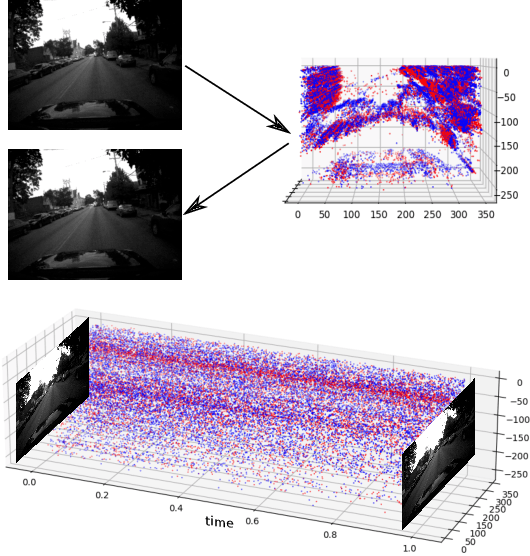
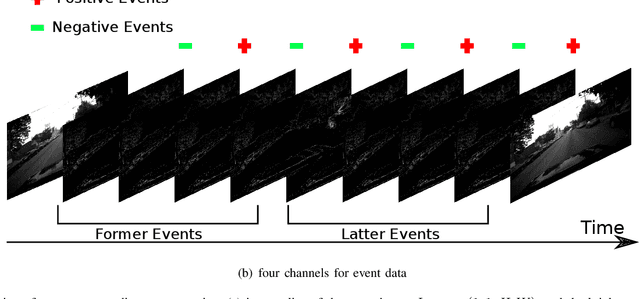
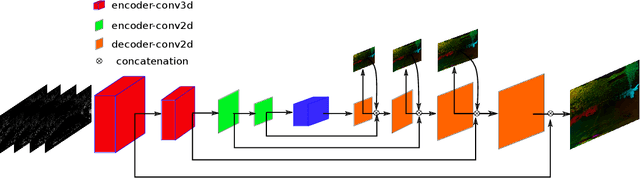
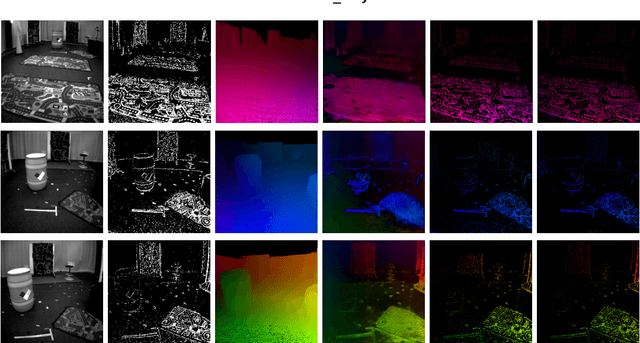
Event-based cameras can overpass frame-based cameras limitations for important tasks such as high-speed motion detection during self-driving cars navigation in low illumination conditions. The event cameras' high temporal resolution and high dynamic range, allow them to work in fast motion and extreme light scenarios. However, conventional computer vision methods, such as Deep Neural Networks, are not well adapted to work with event data as they are asynchronous and discrete. Moreover, the traditional 2D-encoding representation methods for event data, sacrifice the time resolution. In this paper, we first improve the 2D-encoding representation by expanding it into three dimensions to better preserve the temporal distribution of the events. We then propose 3D-FlowNet, a novel network architecture that can process the 3D input representation and output optical flow estimations according to the new encoding methods. A self-supervised training strategy is adopted to compensate the lack of labeled datasets for the event-based camera. Finally, the proposed network is trained and evaluated with the Multi-Vehicle Stereo Event Camera (MVSEC) dataset. The results show that our 3D-FlowNet outperforms state-of-the-art approaches with less training epoch (30 compared to 100 of Spike-FlowNet).
Attention-based Proposals Refinement for 3D Object Detection
Jan 26, 2022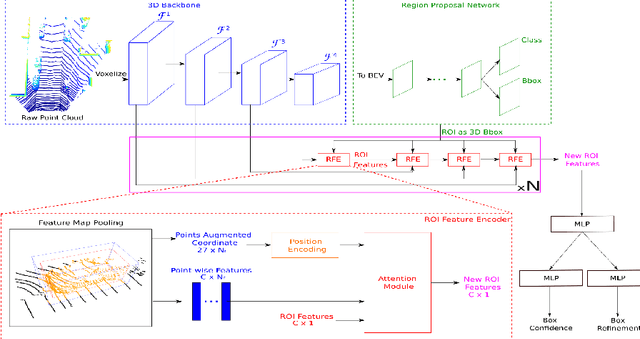
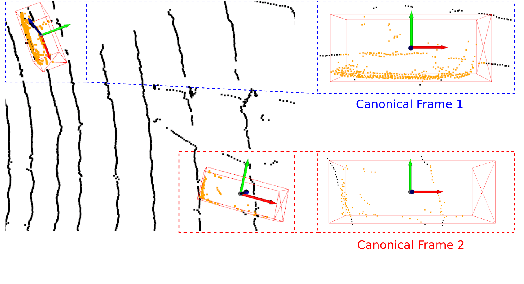

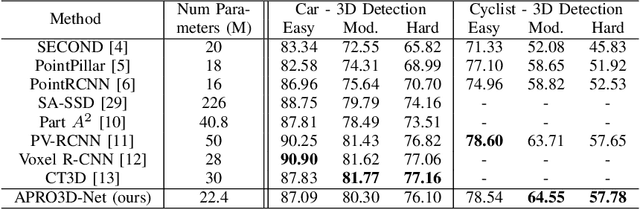
Recent advances in 3D object detection is made by developing the refinement stage for voxel-based Region Proposal Networks (RPN) to better strike the balance between accuracy and efficiency. A popular approach among state-of-the-art frameworks is to divide proposals, or Regions of Interest (ROI), into grids and extract feature for each grid location before synthesizing them to form ROI feature. While achieving impressive performances, such an approach involves a number of hand crafted components (e.g. grid sampling, set abstraction) which requires expert knowledge to be tuned correctly. This paper proposes a data-driven approach to ROI feature computing named APRO3D-Net which consists of a voxel-based RPN and a refinement stage made of Vector Attention. Unlike the original multi-head attention, Vector Attention assigns different weights to different channels within a point feature, thus being able to capture a more sophisticated relation between pooled points and ROI. Experiments on KITTI \textit{validation} set show that our method achieves competitive performance of 84.84 AP for class Car at Moderate difficulty while having the least parameters compared to closely related methods and attaining a quasi-real time inference speed at 15 FPS on NVIDIA V100 GPU. The code is released in https://github.com/quan-dao/APRO3D-Net.
A two-stage data association approach for 3D Multi-object Tracking
Jan 21, 2021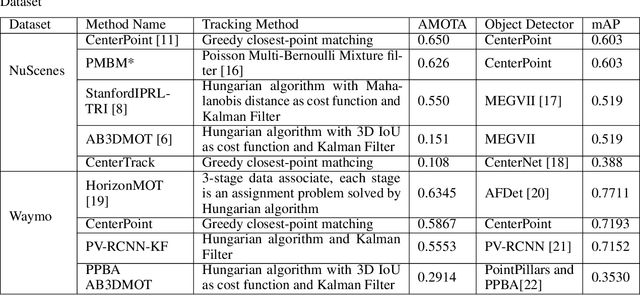
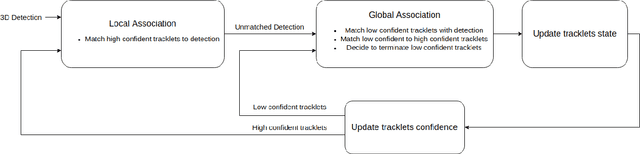
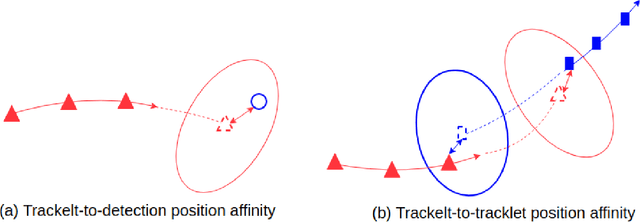

Multi-object tracking (MOT) is an integral part of any autonomous driving pipelines because itproduces trajectories which has been taken by other moving objects in the scene and helps predicttheir future motion. Thanks to the recent advances in 3D object detection enabled by deep learning,track-by-detection has become the dominant paradigm in 3D MOT. In this paradigm, a MOT systemis essentially made of an object detector and a data association algorithm which establishes track-to-detection correspondence. While 3D object detection has been actively researched, associationalgorithms for 3D MOT seem to settle at a bipartie matching formulated as a linear assignmentproblem (LAP) and solved by the Hungarian algorithm. In this paper, we adapt a two-stage dataassociation method which was successful in image-based tracking to the 3D setting, thus providingan alternative for data association for 3D MOT. Our method outperforms the baseline using one-stagebipartie matching for data association by achieving 0.587 AMOTA in NuScenes validation set.