 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-based Autonomous Oversteer Control and Collision Avoidance
May 21, 2025Oversteer, wherein a vehicle's rear tires lose traction and induce unintentional excessive yaw, poses critical safety challenges. Failing to control oversteer often leads to severe traffic accidents. Although recent autonomous driving efforts have attempted to handle oversteer through stabilizing maneuvers, the majority rely on expert-defined trajectories or assume obstacle-free environments, limiting real-world applicability. This paper introduces a novel end-to-end (E2E) autonomous driving approach that tackles oversteer control and collision avoidance simultaneously. Existing E2E techniques, including Imitation Learning (IL), Reinforcement Learning (RL), and Hybrid Learning (HL), generally require near-optimal demonstrations or extensive experience. Yet even skilled human drivers struggle to provide perfect demonstrations under oversteer, and high transition variance hinders accumulating sufficient data. Hence, we present Q-Compared Soft Actor-Critic (QC-SAC), a new HL algorithm that effectively learns from suboptimal demonstration data and adapts rapidly to new conditions. To evaluate QC-SAC, we introduce a benchmark inspired by real-world driver training: a vehicle encounters sudden oversteer on a slippery surface and must avoid randomly placed obstacles ahead. Experimental results show QC-SAC attains near-optimal driving policies, significantly surpassing state-of-the-art IL, RL, and HL baselines. Our method demonstrates the world's first safe autonomous oversteer control with obstacle avoidance.
Efficient On-Chip Implementation of 4D Radar-Based 3D Object Detection on Hailo-8L
May 01, 2025

4D radar has attracted attention in autonomous driving due to its ability to enable robust 3D object detection even under adverse weather conditions. To practically deploy such technologies, it is essential to achieve real-time processing within low-power embedded environments. Addressing this, we present the first on-chip implementation of a 4D radar-based 3D object detection model on the Hailo-8L AI accelerator. Although conventional 3D convolutional neural network (CNN) architectures require 5D inputs, the Hailo-8L only supports 4D tensors, posing a significant challenge. To overcome this limitation, we introduce a tensor transformation method that reshapes 5D inputs into 4D formats during the compilation process, enabling direct deployment without altering the model structure. The proposed system achieves 46.47% AP_3D and 52.75% AP_BEV, maintaining comparable accuracy to GPU-based models while achieving an inference speed of 13.76 Hz. These results demonstrate the applicability of 4D radar-based perception technologies to autonomous driving systems.
Availability-aware Sensor Fusion via Unified Canonical Space for 4D Radar, LiDAR, and Camera
Mar 10, 2025
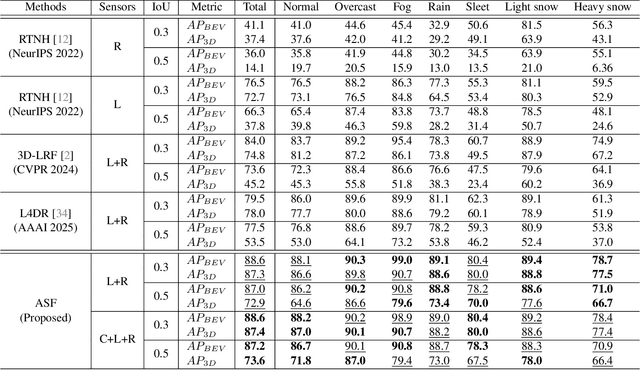


Sensor fusion of camera, LiDAR, and 4-dimensional (4D) Radar has brought a significant performance improvement in autonomous driving (AD). However, there still exist fundamental challenges: deeply coupled fusion methods assume continuous sensor availability, making them vulnerable to sensor degradation and failure, whereas sensor-wise cross-attention fusion methods struggle with computational cost and unified feature representation. This paper presents availability-aware sensor fusion (ASF), a novel method that employs unified canonical projection (UCP) to enable consistency in all sensor features for fusion and cross-attention across sensors along patches (CASAP) to enhance robustness of sensor fusion against sensor degradation and failure. As a result, the proposed ASF shows a superior object detection performance to the existing state-of-the-art fusion methods under various weather and sensor degradation (or failure) conditions; Extensive experiments on the K-Radar dataset demonstrate that ASF achieves improvements of 9.7% in AP BEV (87.2%) and 20.1% in AP 3D (73.6%) in object detection at IoU=0.5, while requiring a low computational cost. The code will be available at https://github.com/kaist-avelab/K-Radar.
4D Radar Ground Truth Augmentation with LiDAR-to-4D Radar Data Synthesis
Mar 05, 2025
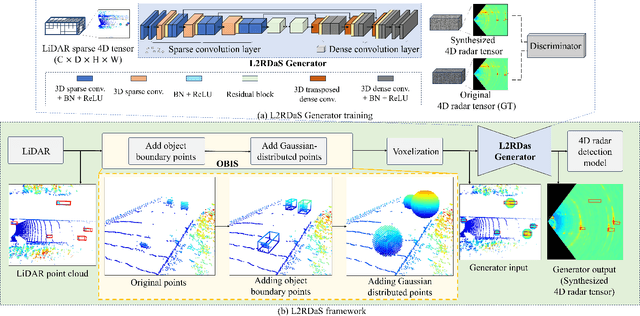


Ground truth augmentation (GT-Aug) is a common method for LiDAR-based object detection, as it enhances object density by leveraging ground truth bounding boxes (GT bboxes). However, directly applying GT-Aug to 4D Radar tensor data overlooks important measurements outside the GT bboxes-such as sidelobes-leading to synthetic distributions that deviate from real-world 4D Radar data. To address this limitation, we propose 4D Radar Ground Truth Augmentation (4DR GT-Aug). Our approach first augments LiDAR data and then converts it to 4D Radar data via a LiDAR-to-4D Radar data synthesis (L2RDaS) module, which explicitly accounts for measurements both inside and outside GT bboxes. In doing so, it produces 4D Radar data distributions that more closely resemble real-world measurements, thereby improving object detection accuracy. Experiments on the K-Radar dataset show that the proposed method achieves improved performance compared to conventional GT-Aug in object detection for 4D Radar. The implementation code is available at https://github.com/kaist-avelab/K-Radar.
A Novel Multi-Teacher Knowledge Distillation for Real-Time Object Detection using 4D Radar
Feb 10, 2025



Accurate 3D object detection is crucial for safe autonomous navigation, requiring reliable performance across diverse weather conditions. While LiDAR performance deteriorates in challenging weather, Radar systems maintain their reliability. Traditional Radars have limitations due to their lack of elevation data, but the recent 4D Radars overcome this by measuring elevation alongside range, azimuth, and Doppler velocity, making them invaluable for autonomous vehicles. The primary challenge in utilizing 4D Radars is the sparsity of their point clouds. Previous works address this by developing architectures that better capture semantics and context in sparse point cloud, largely drawing from LiDAR-based approaches. However, these methods often overlook a unique advantage of 4D Radars: the dense Radar tensor, which encapsulates power measurements across three spatial dimensions and the Doppler dimension. Our paper leverages this tensor to tackle the sparsity issue. We introduce a novel knowledge distillation framework that enables a student model to densify its sparse input in the latent space by emulating an ensemble of teacher models. Our experiments demonstrate a 25% performance improvement over the state-of-the-art RTNH model on the K-Radar dataset. Notably, this improvement is achieved while still maintaining a real-time inference speed.
4DR P2T: 4D Radar Tensor Synthesis with Point Clouds
Feb 08, 2025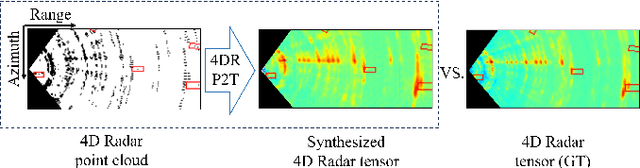
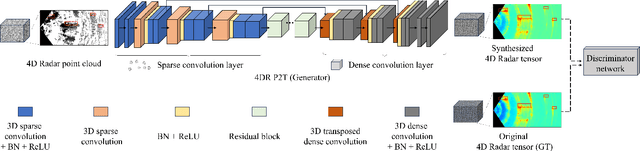
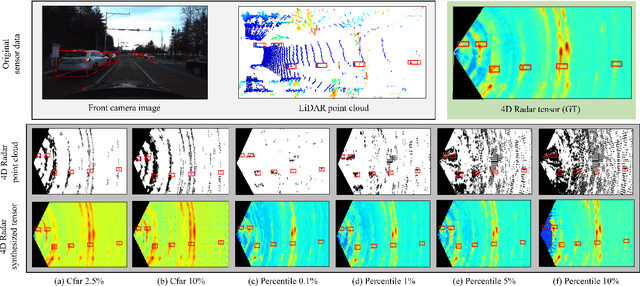
In four-dimensional (4D) Radar-based point cloud generation, clutter removal is commonly performed using the constant false alarm rate (CFAR) algorithm. However, CFAR may not fully capture the spatial characteristics of objects. To address limitation, this paper proposes the 4D Radar Point-to-Tensor (4DR P2T) model, which generates tensor data suitable for deep learning applications while minimizing measurement loss. Our method employs a conditional generative adversarial network (cGAN), modified to effectively process 4D Radar point cloud data and generate tensor data. Experimental results on the K-Radar dataset validate the effectiveness of the 4DR P2T model, achieving an average PSNR of 30.39dB and SSIM of 0.96. Additionally, our analysis of different point cloud generation methods highlights that the 5% percentile method provides the best overall performance, while the 1% percentile method optimally balances data volume reduction and performance, making it well-suited for deep learning applications.
Bayesian Approximation-Based Trajectory Prediction and Tracking with 4D Radar
Feb 03, 2025



Accurate 3D multi-object tracking (MOT) is vital for autonomous vehicles, yet LiDAR and camera-based methods degrade in adverse weather. Meanwhile, Radar-based solutions remain robust but often suffer from limited vertical resolution and simplistic motion models. Existing Kalman filter-based approaches also rely on fixed noise covariance, hampering adaptability when objects make sudden maneuvers. We propose Bayes-4DRTrack, a 4D Radar-based MOT framework that adopts a transformer-based motion prediction network to capture nonlinear motion dynamics and employs Bayesian approximation in both detection and prediction steps. Moreover, our two-stage data association leverages Doppler measurements to better distinguish closely spaced targets. Evaluated on the K-Radar dataset (including adverse weather scenarios), Bayes-4DRTrack demonstrates a 5.7% gain in Average Multi-Object Tracking Accuracy (AMOTA) over methods with traditional motion models and fixed noise covariance. These results showcase enhanced robustness and accuracy in demanding, real-world conditions.
Open-Source Autonomous Driving Software Platforms: Comparison of Autoware and Apollo
Jan 31, 2025



Full-stack autonomous driving system spans diverse technological domains-including perception, planning, and control-that each require in-depth research. Moreover, validating such technologies of the system necessitates extensive supporting infrastructure, from simulators and sensors to high-definition maps. These complexities with barrier to entry pose substantial limitations for individual developers and research groups. Recently, open-source autonomous driving software platforms have emerged to address this challenge by providing autonomous driving technologies and practical supporting infrastructure for implementing and evaluating autonomous driving functionalities. Among the prominent open-source platforms, Autoware and Apollo are frequently adopted in both academia and industry. While previous studies have assessed each platform independently, few have offered a quantitative and detailed head-to-head comparison of their capabilities. In this paper, we systematically examine the core modules of Autoware and Apollo and evaluate their middleware performance to highlight key differences. These insights serve as a practical reference for researchers and engineers, guiding them in selecting the most suitable platform for their specific development environments and advancing the field of full-stack autonomous driving system.
Enhancing Performance of Point Cloud Completion Networks with Consistency Loss
Oct 09, 2024Point cloud completion networks are conventionally trained to minimize the disparities between the completed point cloud and the ground-truth counterpart. However, an incomplete object-level point cloud can have multiple valid completion solutions when it is examined in isolation. This one-to-many mapping issue can cause contradictory supervision signals to the network because the loss function may produce different values for identical input-output pairs of the network. In many cases, this issue could adversely affect the network optimization process. In this work, we propose to enhance the conventional learning objective using a novel completion consistency loss to mitigate the one-to-many mapping problem. Specifically, the proposed consistency loss ensure that a point cloud completion network generates a coherent completion solution for incomplete objects originating from the same source point cloud. Experimental results across multiple well-established datasets and benchmarks demonstrated the proposed completion consistency loss have excellent capability to enhance the completion performance of various existing networks without any modification to the design of the networks. The proposed consistency loss enhances the performance of the point completion network without affecting the inference speed, thereby increasing the accuracy of point cloud completion. Notably, a state-of-the-art point completion network trained with the proposed consistency loss can achieve state-of-the-art accuracy on the challenging new MVP dataset. The code and result of experiment various point completion models using proposed consistency loss will be available at: https://github.com/kaist-avelab/ConsistencyLoss .
RTNH+: Enhanced 4D Radar Object Detection Network using Combined CFAR-based Two-level Preprocessing and Vertical Encoding
Oct 19, 2023



Four-dimensional (4D) Radar is a useful sensor for 3D object detection and the relative radial speed estimation of surrounding objects under various weather conditions. However, since Radar measurements are corrupted with invalid components such as noise, interference, and clutter, it is necessary to employ a preprocessing algorithm before the 3D object detection with neural networks. In this paper, we propose RTNH+ that is an enhanced version of RTNH, a 4D Radar object detection network, by two novel algorithms. The first algorithm is the combined constant false alarm rate (CFAR)-based two-level preprocessing (CCTP) algorithm that generates two filtered measurements of different characteristics using the same 4D Radar measurements, which can enrich the information of the input to the 4D Radar object detection network. The second is the vertical encoding (VE) algorithm that effectively encodes vertical features of the road objects from the CCTP outputs. We provide details of the RTNH+, and demonstrate that RTNH+ achieves significant performance improvement of 10.14\% in ${{AP}_{3D}^{IoU=0.3}}$ and 16.12\% in ${{AP}_{3D}^{IoU=0.5}}$ over RTNH.