 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge4D Radar Ground Truth Augmentation with LiDAR-to-4D Radar Data Synthesis
Mar 05, 2025
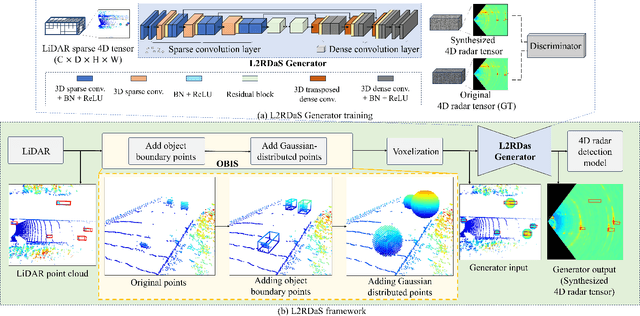


Ground truth augmentation (GT-Aug) is a common method for LiDAR-based object detection, as it enhances object density by leveraging ground truth bounding boxes (GT bboxes). However, directly applying GT-Aug to 4D Radar tensor data overlooks important measurements outside the GT bboxes-such as sidelobes-leading to synthetic distributions that deviate from real-world 4D Radar data. To address this limitation, we propose 4D Radar Ground Truth Augmentation (4DR GT-Aug). Our approach first augments LiDAR data and then converts it to 4D Radar data via a LiDAR-to-4D Radar data synthesis (L2RDaS) module, which explicitly accounts for measurements both inside and outside GT bboxes. In doing so, it produces 4D Radar data distributions that more closely resemble real-world measurements, thereby improving object detection accuracy. Experiments on the K-Radar dataset show that the proposed method achieves improved performance compared to conventional GT-Aug in object detection for 4D Radar. The implementation code is available at https://github.com/kaist-avelab/K-Radar.
4DR P2T: 4D Radar Tensor Synthesis with Point Clouds
Feb 08, 2025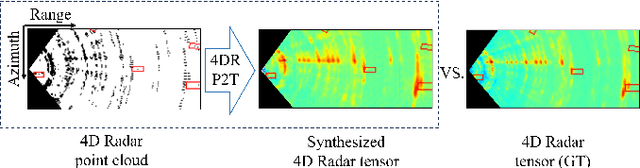
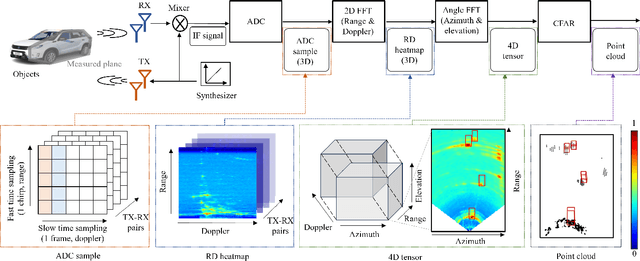
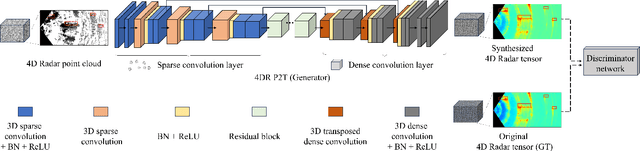
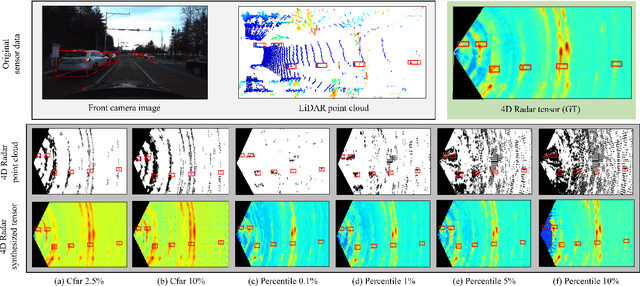
In four-dimensional (4D) Radar-based point cloud generation, clutter removal is commonly performed using the constant false alarm rate (CFAR) algorithm. However, CFAR may not fully capture the spatial characteristics of objects. To address limitation, this paper proposes the 4D Radar Point-to-Tensor (4DR P2T) model, which generates tensor data suitable for deep learning applications while minimizing measurement loss. Our method employs a conditional generative adversarial network (cGAN), modified to effectively process 4D Radar point cloud data and generate tensor data. Experimental results on the K-Radar dataset validate the effectiveness of the 4DR P2T model, achieving an average PSNR of 30.39dB and SSIM of 0.96. Additionally, our analysis of different point cloud generation methods highlights that the 5% percentile method provides the best overall performance, while the 1% percentile method optimally balances data volume reduction and performance, making it well-suited for deep learning applications.