 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Motion Planning Tasks with a Scalable Generative Model
Jul 03, 2024



As autonomous driving systems being deployed to millions of vehicles, there is a pressing need of improving the system's scalability, safety and reducing the engineering cost. A realistic, scalable, and practical simulator of the driving world is highly desired. In this paper, we present an efficient solution based on generative models which learns the dynamics of the driving scenes. With this model, we can not only simulate the diverse futures of a given driving scenario but also generate a variety of driving scenarios conditioned on various prompts. Our innovative design allows the model to operate in both full-Autoregressive and partial-Autoregressive modes, significantly improving inference and training speed without sacrificing generative capability. This efficiency makes it ideal for being used as an online reactive environment for reinforcement learning, an evaluator for planning policies, and a high-fidelity simulator for testing. We evaluated our model against two real-world datasets: the Waymo motion dataset and the nuPlan dataset. On the simulation realism and scene generation benchmark, our model achieves the state-of-the-art performance. And in the planning benchmarks, our planner outperforms the prior arts. We conclude that the proposed generative model may serve as a foundation for a variety of motion planning tasks, including data generation, simulation, planning, and online training. Source code is public at https://github.com/HorizonRobotics/GUMP/
PACE: Pose Annotations in Cluttered Environments
Dec 23, 2023Pose estimation is a crucial task in computer vision, enabling tracking and manipulating objects in images or videos. While several datasets exist for pose estimation, there is a lack of large-scale datasets specifically focusing on cluttered scenes with occlusions. This limitation is a bottleneck in the development and evaluation of pose estimation methods, particularly toward the goal of real-world application in environments where occlusions are common. Addressing this, we introduce PACE (Pose Annotations in Cluttered Environments), a large-scale benchmark designed to advance the development and evaluation of pose estimation methods in cluttered scenarios. PACE encompasses 54,945 frames with 257,673 annotations across 300 videos, covering 576 objects from 44 categories and featuring a mix of rigid and articulated items in cluttered scenes. To annotate the real-world data efficiently, we developed an innovative annotation system utilizing a calibrated 3-camera setup. We test state-of-the-art algorithms in PACE along two tracks: pose estimation, and object pose tracking, revealing the benchmark's challenges and research opportunities. We plan to release PACE as a public evaluation benchmark, along the annotations tools we developed, to stimulate further advancements in the field. Our code and data is available on https://github.com/qq456cvb/PACE.
Imitation with Spatial-Temporal Heatmap: 2nd Place Solution for NuPlan Challenge
Jun 26, 2023This paper presents our 2nd place solution for the NuPlan Challenge 2023. Autonomous driving in real-world scenarios is highly complex and uncertain. Achieving safe planning in the complex multimodal scenarios is a highly challenging task. Our approach, Imitation with Spatial-Temporal Heatmap, adopts the learning form of behavior cloning, innovatively predicts the future multimodal states with a heatmap representation, and uses trajectory refinement techniques to ensure final safety. The experiment shows that our method effectively balances the vehicle's progress and safety, generating safe and comfortable trajectories. In the NuPlan competition, we achieved the second highest overall score, while obtained the best scores in the ego progress and comfort metrics.
HOPE: Hierarchical Spatial-temporal Network for Occupancy Flow Prediction
Jun 21, 2022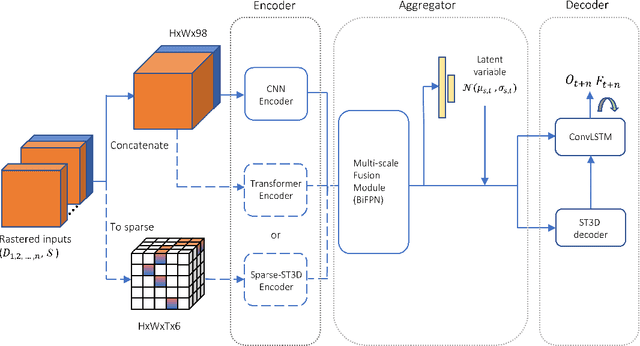


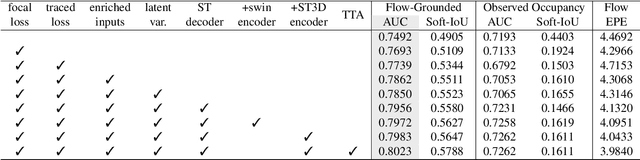
In this report, we introduce our solution to the Occupancy and Flow Prediction challenge in the Waymo Open Dataset Challenges at CVPR 2022, which ranks 1st on the leaderboard. We have developed a novel hierarchical spatial-temporal network featured with spatial-temporal encoders, a multi-scale aggregator enriched with latent variables, and a recursive hierarchical 3D decoder. We use multiple losses including focal loss and modified flow trace loss to efficiently guide the training process. Our method achieves a Flow-Grounded Occupancy AUC of 0.8389 and outperforms all the other teams on the leaderboard.