 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlexAvatar: Flexible Large Reconstruction Model for Animatable Gaussian Head Avatars with Detailed Deformation
Dec 19, 2025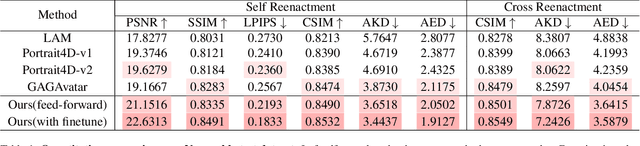
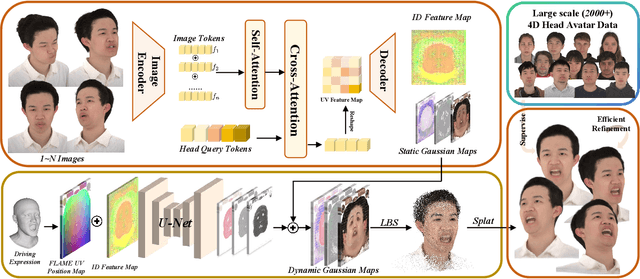
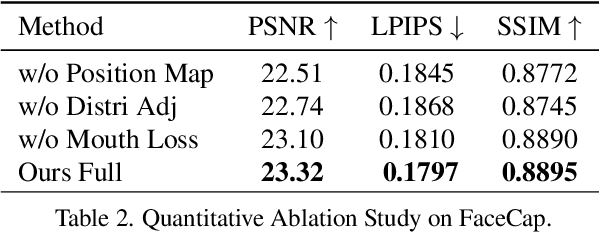

We present FlexAvatar, a flexible large reconstruction model for high-fidelity 3D head avatars with detailed dynamic deformation from single or sparse images, without requiring camera poses or expression labels. It leverages a transformer-based reconstruction model with structured head query tokens as canonical anchor to aggregate flexible input-number-agnostic, camera-pose-free and expression-free inputs into a robust canonical 3D representation. For detailed dynamic deformation, we introduce a lightweight UNet decoder conditioned on UV-space position maps, which can produce detailed expression-dependent deformations in real time. To better capture rare but critical expressions like wrinkles and bared teeth, we also adopt a data distribution adjustment strategy during training to balance the distribution of these expressions in the training set. Moreover, a lightweight 10-second refinement can further enhances identity-specific details in extreme identities without affecting deformation quality. Extensive experiments demonstrate that our FlexAvatar achieves superior 3D consistency, detailed dynamic realism compared with previous methods, providing a practical solution for animatable 3D avatar creation.
POLAR: A Portrait OLAT Dataset and Generative Framework for Illumination-Aware Face Modeling
Dec 16, 2025Face relighting aims to synthesize realistic portraits under novel illumination while preserving identity and geometry. However, progress remains constrained by the limited availability of large-scale, physically consistent illumination data. To address this, we introduce POLAR, a large-scale and physically calibrated One-Light-at-a-Time (OLAT) dataset containing over 200 subjects captured under 156 lighting directions, multiple views, and diverse expressions. Building upon POLAR, we develop a flow-based generative model POLARNet that predicts per-light OLAT responses from a single portrait, capturing fine-grained and direction-aware illumination effects while preserving facial identity. Unlike diffusion or background-conditioned methods that rely on statistical or contextual cues, our formulation models illumination as a continuous, physically interpretable transformation between lighting states, enabling scalable and controllable relighting. Together, POLAR and POLARNet form a unified illumination learning framework that links real data, generative synthesis, and physically grounded relighting, establishing a self-sustaining "chicken-and-egg" cycle for scalable and reproducible portrait illumination. Our project page: https://rex0191.github.io/POLAR/.
EnvPoser: Environment-aware Realistic Human Motion Estimation from Sparse Observations with Uncertainty Modeling
Dec 13, 2024



Estimating full-body motion using the tracking signals of head and hands from VR devices holds great potential for various applications. However, the sparsity and unique distribution of observations present a significant challenge, resulting in an ill-posed problem with multiple feasible solutions (i.e., hypotheses). This amplifies uncertainty and ambiguity in full-body motion estimation, especially for the lower-body joints. Therefore, we propose a new method, EnvPoser, that employs a two-stage framework to perform full-body motion estimation using sparse tracking signals and pre-scanned environment from VR devices. EnvPoser models the multi-hypothesis nature of human motion through an uncertainty-aware estimation module in the first stage. In the second stage, we refine these multi-hypothesis estimates by integrating semantic and geometric environmental constraints, ensuring that the final motion estimation aligns realistically with both the environmental context and physical interactions. Qualitative and quantitative experiments on two public datasets demonstrate that our method achieves state-of-the-art performance, highlighting significant improvements in human motion estimation within motion-environment interaction scenarios.
EMHI: A Multimodal Egocentric Human Motion Dataset with HMD and Body-Worn IMUs
Aug 30, 2024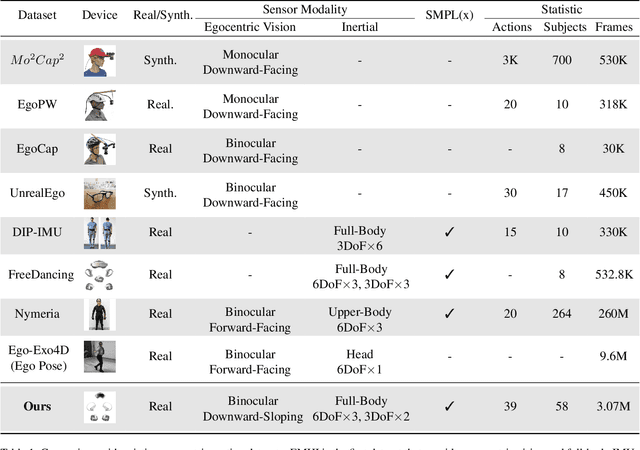
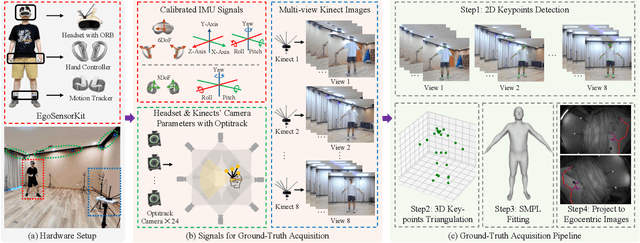
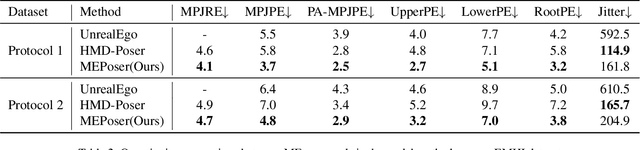
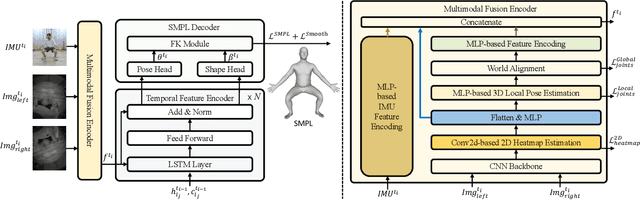
Egocentric human pose estimation (HPE) using wearable sensors is essential for VR/AR applications. Most methods rely solely on either egocentric-view images or sparse Inertial Measurement Unit (IMU) signals, leading to inaccuracies due to self-occlusion in images or the sparseness and drift of inertial sensors. Most importantly, the lack of real-world datasets containing both modalities is a major obstacle to progress in this field. To overcome the barrier, we propose EMHI, a multimodal \textbf{E}gocentric human \textbf{M}otion dataset with \textbf{H}ead-Mounted Display (HMD) and body-worn \textbf{I}MUs, with all data collected under the real VR product suite. Specifically, EMHI provides synchronized stereo images from downward-sloping cameras on the headset and IMU data from body-worn sensors, along with pose annotations in SMPL format. This dataset consists of 885 sequences captured by 58 subjects performing 39 actions, totaling about 28.5 hours of recording. We evaluate the annotations by comparing them with optical marker-based SMPL fitting results. To substantiate the reliability of our dataset, we introduce MEPoser, a new baseline method for multimodal egocentric HPE, which employs a multimodal fusion encoder, temporal feature encoder, and MLP-based regression heads. The experiments on EMHI show that MEPoser outperforms existing single-modal methods and demonstrates the value of our dataset in solving the problem of egocentric HPE. We believe the release of EMHI and the method could advance the research of egocentric HPE and expedite the practical implementation of this technology in VR/AR products.
HeadGAP: Few-shot 3D Head Avatar via Generalizable Gaussian Priors
Aug 12, 2024
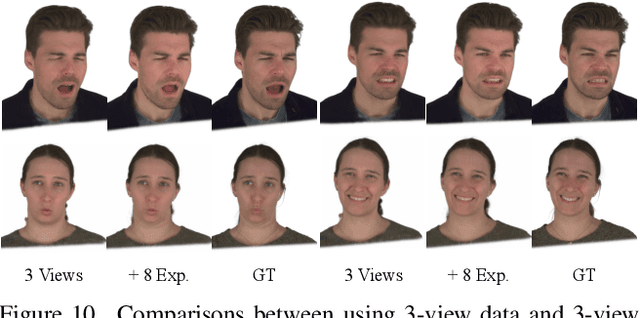
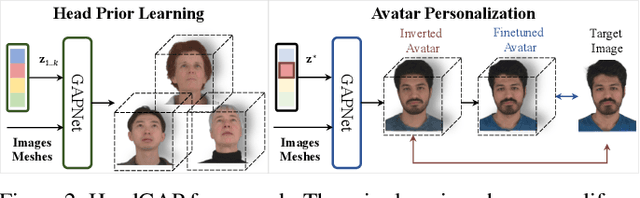
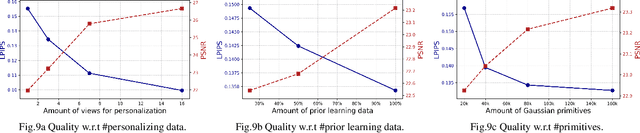
In this paper, we present a novel 3D head avatar creation approach capable of generalizing from few-shot in-the-wild data with high-fidelity and animatable robustness. Given the underconstrained nature of this problem, incorporating prior knowledge is essential. Therefore, we propose a framework comprising prior learning and avatar creation phases. The prior learning phase leverages 3D head priors derived from a large-scale multi-view dynamic dataset, and the avatar creation phase applies these priors for few-shot personalization. Our approach effectively captures these priors by utilizing a Gaussian Splatting-based auto-decoder network with part-based dynamic modeling. Our method employs identity-shared encoding with personalized latent codes for individual identities to learn the attributes of Gaussian primitives. During the avatar creation phase, we achieve fast head avatar personalization by leveraging inversion and fine-tuning strategies. Extensive experiments demonstrate that our model effectively exploits head priors and successfully generalizes them to few-shot personalization, achieving photo-realistic rendering quality, multi-view consistency, and stable animation.