 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSEGA: Drivable 3D Gaussian Head Avatar from a Single Image
Apr 19, 2025Creating photorealistic 3D head avatars from limited input has become increasingly important for applications in virtual reality, telepresence, and digital entertainment. While recent advances like neural rendering and 3D Gaussian splatting have enabled high-quality digital human avatar creation and animation, most methods rely on multiple images or multi-view inputs, limiting their practicality for real-world use. In this paper, we propose SEGA, a novel approach for Single-imagE-based 3D drivable Gaussian head Avatar creation that combines generalized prior models with a new hierarchical UV-space Gaussian Splatting framework. SEGA seamlessly combines priors derived from large-scale 2D datasets with 3D priors learned from multi-view, multi-expression, and multi-ID data, achieving robust generalization to unseen identities while ensuring 3D consistency across novel viewpoints and expressions. We further present a hierarchical UV-space Gaussian Splatting framework that leverages FLAME-based structural priors and employs a dual-branch architecture to disentangle dynamic and static facial components effectively. The dynamic branch encodes expression-driven fine details, while the static branch focuses on expression-invariant regions, enabling efficient parameter inference and precomputation. This design maximizes the utility of limited 3D data and achieves real-time performance for animation and rendering. Additionally, SEGA performs person-specific fine-tuning to further enhance the fidelity and realism of the generated avatars. Experiments show our method outperforms state-of-the-art approaches in generalization ability, identity preservation, and expression realism, advancing one-shot avatar creation for practical applications.
HeadGAP: Few-shot 3D Head Avatar via Generalizable Gaussian Priors
Aug 12, 2024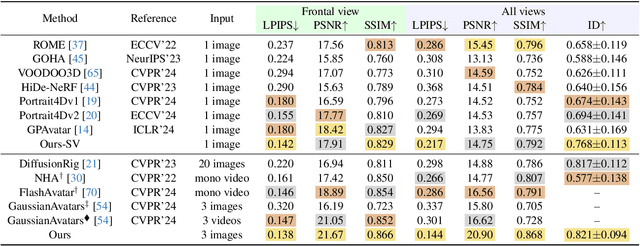
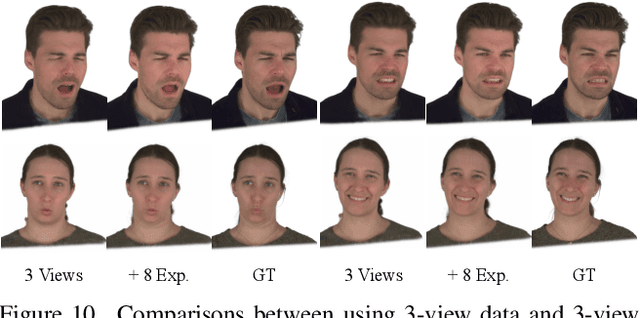
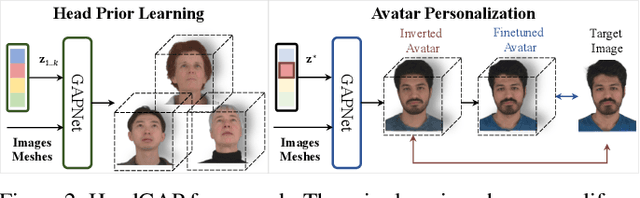
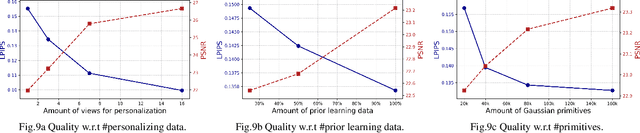
In this paper, we present a novel 3D head avatar creation approach capable of generalizing from few-shot in-the-wild data with high-fidelity and animatable robustness. Given the underconstrained nature of this problem, incorporating prior knowledge is essential. Therefore, we propose a framework comprising prior learning and avatar creation phases. The prior learning phase leverages 3D head priors derived from a large-scale multi-view dynamic dataset, and the avatar creation phase applies these priors for few-shot personalization. Our approach effectively captures these priors by utilizing a Gaussian Splatting-based auto-decoder network with part-based dynamic modeling. Our method employs identity-shared encoding with personalized latent codes for individual identities to learn the attributes of Gaussian primitives. During the avatar creation phase, we achieve fast head avatar personalization by leveraging inversion and fine-tuning strategies. Extensive experiments demonstrate that our model effectively exploits head priors and successfully generalizes them to few-shot personalization, achieving photo-realistic rendering quality, multi-view consistency, and stable animation.
Learning fast and agile quadrupedal locomotion over complex terrain
Jul 02, 2022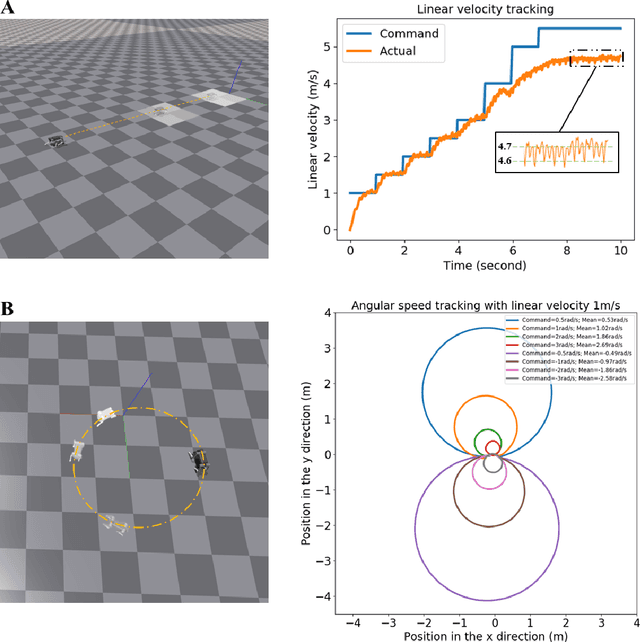
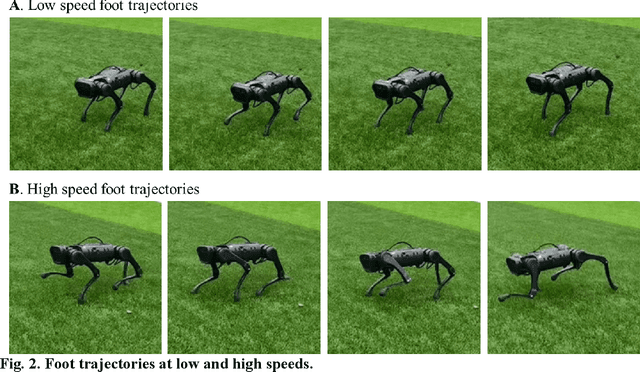
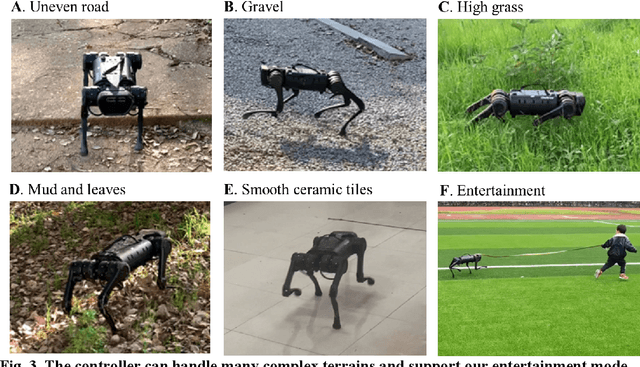
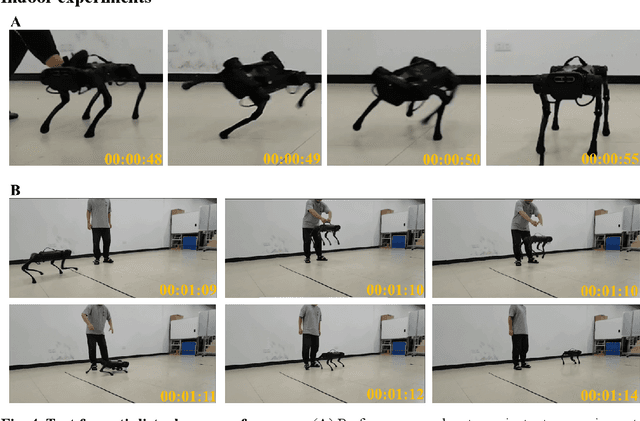
In this paper, we propose a robust controller that achieves natural and stably fast locomotion on a real blind quadruped robot. With only proprioceptive information, the quadruped robot can move at a maximum speed of 10 times its body length, and has the ability to pass through various complex terrains. The controller is trained in the simulation environment by model-free reinforcement learning. In this paper, the proposed loose neighborhood control architecture not only guarantees the learning rate, but also obtains an action network that is easy to transfer to a real quadruped robot. Our research finds that there is a problem of data symmetry loss during training, which leads to unbalanced performance of the learned controller on the left-right symmetric quadruped robot structure, and proposes a mirror-world neural network to solve the performance problem. The learned controller composed of the mirror-world network can make the robot achieve excellent anti-disturbance ability. No specific human knowledge such as a foot trajectory generator are used in the training architecture. The learned controller can coordinate the robot's gait frequency and locomotion speed, and the locomotion pattern is more natural and reasonable than the artificially designed controller. Our controller has excellent anti-disturbance performance, and has good generalization ability to reach locomotion speeds it has never learned and traverse terrains it has never seen before.