 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmpathy-R1: A Chain-of-Empathy and Reinforcement Learning Framework for Long-Form Mental Health Support
Sep 18, 2025Empathy is critical for effective mental health support, especially when addressing Long Counseling Texts (LCTs). However, existing Large Language Models (LLMs) often generate replies that are semantically fluent but lack the structured reasoning necessary for genuine psychological support, particularly in a Chinese context. To bridge this gap, we introduce Empathy-R1, a novel framework that integrates a Chain-of-Empathy (CoE) reasoning process with Reinforcement Learning (RL) to enhance response quality for LCTs. Inspired by cognitive-behavioral therapy, our CoE paradigm guides the model to sequentially reason about a help-seeker's emotions, causes, and intentions, making its thinking process both transparent and interpretable. Our framework is empowered by a new large-scale Chinese dataset, Empathy-QA, and a two-stage training process. First, Supervised Fine-Tuning instills the CoE's reasoning structure. Subsequently, RL, guided by a dedicated reward model, refines the therapeutic relevance and contextual appropriateness of the final responses. Experiments show that Empathy-R1 achieves strong performance on key automatic metrics. More importantly, human evaluations confirm its superiority, showing a clear preference over strong baselines and achieving a Win@1 rate of 44.30% on our new benchmark. By enabling interpretable and contextually nuanced responses, Empathy-R1 represents a significant advancement in developing responsible and genuinely beneficial AI for mental health support.
Collaborative Medical Triage under Uncertainty: A Multi-Agent Dynamic Matching Approach
Jul 30, 2025



The post-pandemic surge in healthcare demand, coupled with critical nursing shortages, has placed unprecedented pressure on emergency department triage systems, necessitating innovative AI-driven solutions. We present a multi-agent interactive intelligent system for medical triage that addresses three fundamental challenges in current AI-based triage systems: insufficient medical specialization leading to hallucination-induced misclassifications, heterogeneous department structures across healthcare institutions, and inefficient detail-oriented questioning that impedes rapid triage decisions. Our system employs three specialized agents - RecipientAgent, InquirerAgent, and DepartmentAgent - that collaborate through structured inquiry mechanisms and department-specific guidance rules to transform unstructured patient symptoms into accurate department recommendations. To ensure robust evaluation, we constructed a comprehensive Chinese medical triage dataset from a medical website, comprising 3,360 real-world cases spanning 9 primary departments and 62 secondary departments. Through systematic data imputation using large language models, we address the prevalent issue of incomplete medical records in real-world data. Experimental results demonstrate that our multi-agent system achieves 89.2% accuracy in primary department classification and 73.9% accuracy in secondary department classification after four rounds of patient interaction. The system's pattern-matching-based guidance mechanisms enable efficient adaptation to diverse hospital configurations while maintaining high triage accuracy. Our work provides a scalable framework for deploying AI-assisted triage systems that can accommodate the organizational heterogeneity of healthcare institutions while ensuring clinically sound decision-making.
FRAME: Feedback-Refined Agent Methodology for Enhancing Medical Research Insights
May 06, 2025



The automation of scientific research through large language models (LLMs) presents significant opportunities but faces critical challenges in knowledge synthesis and quality assurance. We introduce Feedback-Refined Agent Methodology (FRAME), a novel framework that enhances medical paper generation through iterative refinement and structured feedback. Our approach comprises three key innovations: (1) A structured dataset construction method that decomposes 4,287 medical papers into essential research components through iterative refinement; (2) A tripartite architecture integrating Generator, Evaluator, and Reflector agents that progressively improve content quality through metric-driven feedback; and (3) A comprehensive evaluation framework that combines statistical metrics with human-grounded benchmarks. Experimental results demonstrate FRAME's effectiveness, achieving significant improvements over conventional approaches across multiple models (9.91% average gain with DeepSeek V3, comparable improvements with GPT-4o Mini) and evaluation dimensions. Human evaluation confirms that FRAME-generated papers achieve quality comparable to human-authored works, with particular strength in synthesizing future research directions. The results demonstrated our work could efficiently assist medical research by building a robust foundation for automated medical research paper generation while maintaining rigorous academic standards.
STT: Soft Template Tuning for Few-Shot Adaptation
Jul 18, 2022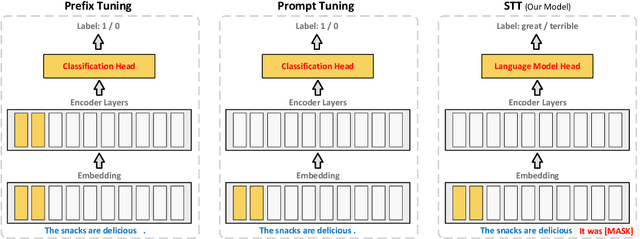
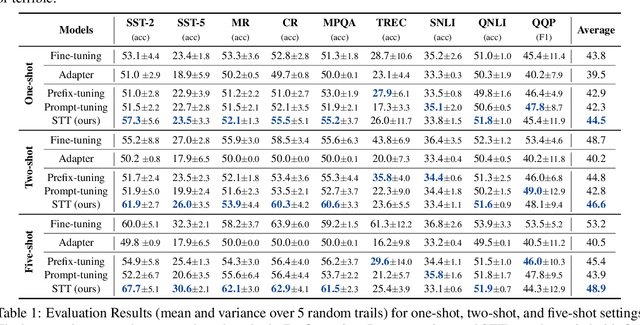
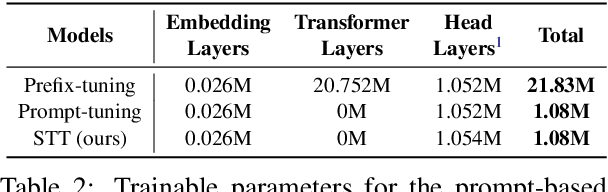
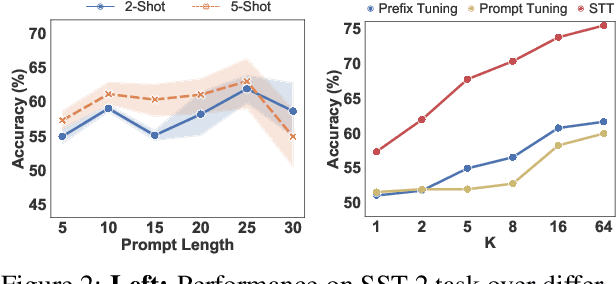
Prompt tuning has been an extremely effective tool to adapt a pre-trained model to downstream tasks. However, standard prompt-based methods mainly consider the case of sufficient data of downstream tasks. It is still unclear whether the advantage can be transferred to the few-shot regime, where only limited data are available for each downstream task. Although some works have demonstrated the potential of prompt-tuning under the few-shot setting, the main stream methods via searching discrete prompts or tuning soft prompts with limited data are still very challenging. Through extensive empirical studies, we find that there is still a gap between prompt tuning and fully fine-tuning for few-shot learning. To bridge the gap, we propose a new prompt-tuning framework, called Soft Template Tuning (STT). STT combines manual and auto prompts, and treats downstream classification tasks as a masked language modeling task. Comprehensive evaluation on different settings suggests STT can close the gap between fine-tuning and prompt-based methods without introducing additional parameters. Significantly, it can even outperform the time- and resource-consuming fine-tuning method on sentiment classification tasks.
A Spike Learning System for Event-driven Object Recognition
Jan 21, 2021
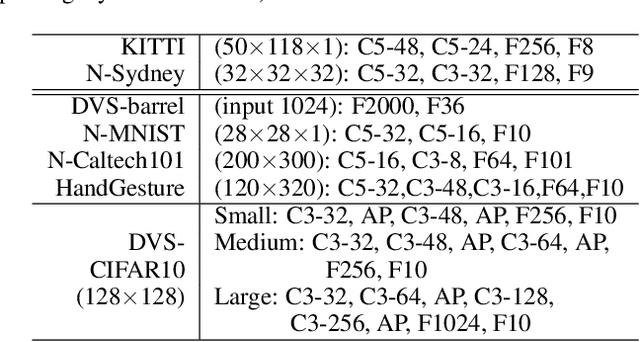
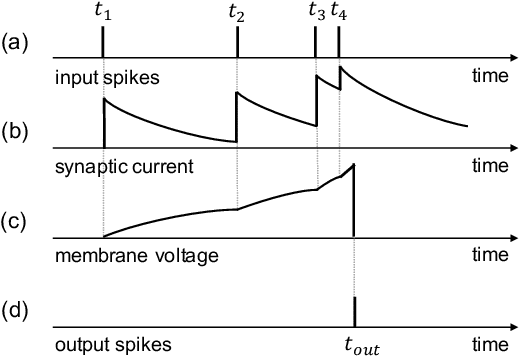
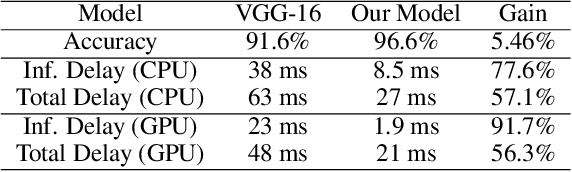
Event-driven sensors such as LiDAR and dynamic vision sensor (DVS) have found increased attention in high-resolution and high-speed applications. A lot of work has been conducted to enhance recognition accuracy. However, the essential topic of recognition delay or time efficiency is largely under-explored. In this paper, we present a spiking learning system that uses the spiking neural network (SNN) with a novel temporal coding for accurate and fast object recognition. The proposed temporal coding scheme maps each event's arrival time and data into SNN spike time so that asynchronously-arrived events are processed immediately without delay. The scheme is integrated nicely with the SNN's asynchronous processing capability to enhance time efficiency. A key advantage over existing systems is that the event accumulation time for each recognition task is determined automatically by the system rather than pre-set by the user. The system can finish recognition early without waiting for all the input events. Extensive experiments were conducted over a list of 7 LiDAR and DVS datasets. The results demonstrated that the proposed system had state-of-the-art recognition accuracy while achieving remarkable time efficiency. Recognition delay was shown to reduce by 56.3% to 91.7% in various experiment settings over the popular KITTI dataset.
Survive the Schema Changes: Integration of Unmanaged Data Using Deep Learning
Oct 15, 2020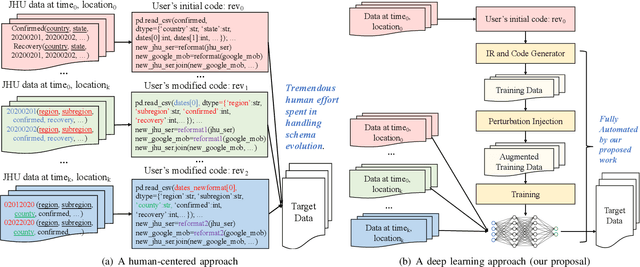
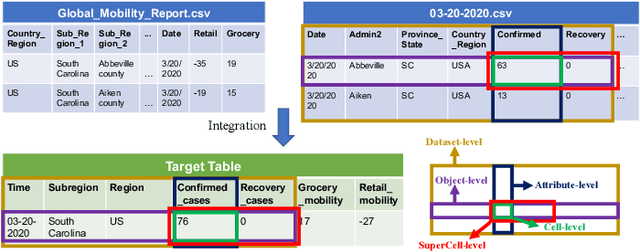

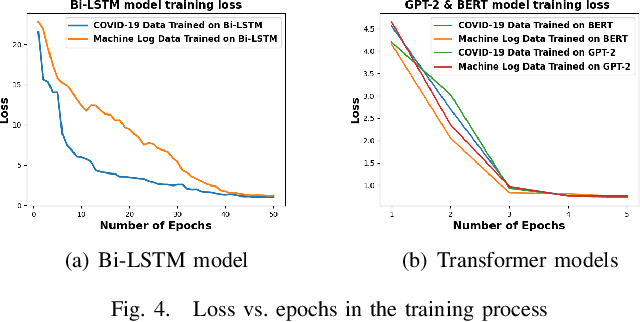
Data is the king in the age of AI. However data integration is often a laborious task that is hard to automate. Schema change is one significant obstacle to the automation of the end-to-end data integration process. Although there exist mechanisms such as query discovery and schema modification language to handle the problem, these approaches can only work with the assumption that the schema is maintained by a database. However, we observe diversified schema changes in heterogeneous data and open data, most of which has no schema defined. In this work, we propose to use deep learning to automatically deal with schema changes through a super cell representation and automatic injection of perturbations to the training data to make the model robust to schema changes. Our experimental results demonstrate that our proposed approach is effective for two real-world data integration scenarios: coronavirus data integration, and machine log integration.
DeepBrain: Towards Personalized EEG Interaction through Attentional and Embedded LSTM Learning
Feb 06, 2020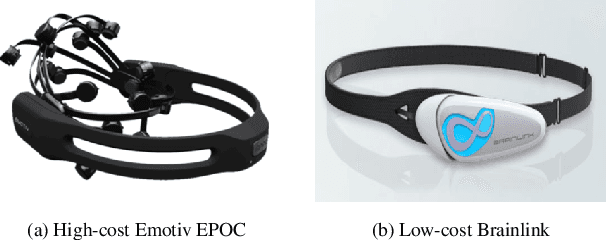

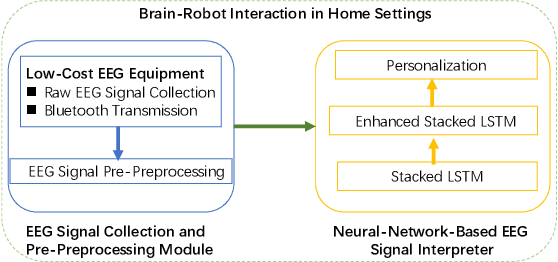
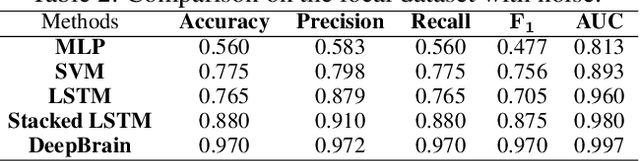
The "mind-controlling" capability has always been in mankind's fantasy. With the recent advancements of electroencephalograph (EEG) techniques, brain-computer interface (BCI) researchers have explored various solutions to allow individuals to perform various tasks using their minds. However, the commercial off-the-shelf devices to run accurate EGG signal collection are usually expensive and the comparably cheaper devices can only present coarse results, which prevents the practical application of these devices in domestic services. To tackle this challenge, we propose and develop an end-to-end solution that enables fine brain-robot interaction (BRI) through embedded learning of coarse EEG signals from the low-cost devices, namely DeepBrain, so that people having difficulty to move, such as the elderly, can mildly command and control a robot to perform some basic household tasks. Our contributions are two folds: 1) We present a stacked long short term memory (Stacked LSTM) structure with specific pre-processing techniques to handle the time-dependency of EEG signals and their classification. 2) We propose personalized design to capture multiple features and achieve accurate recognition of individual EEG signals by enhancing the signal interpretation of Stacked LSTM with attention mechanism. Our real-world experiments demonstrate that the proposed end-to-end solution with low cost can achieve satisfactory run-time speed, accuracy and energy-efficiency.
Temporal Pulses Driven Spiking Neural Network for Fast Object Recognition in Autonomous Driving
Jan 24, 2020
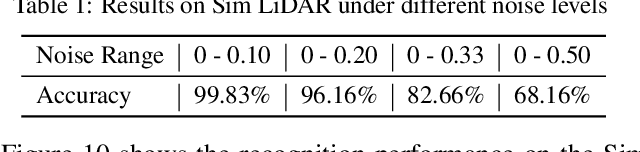
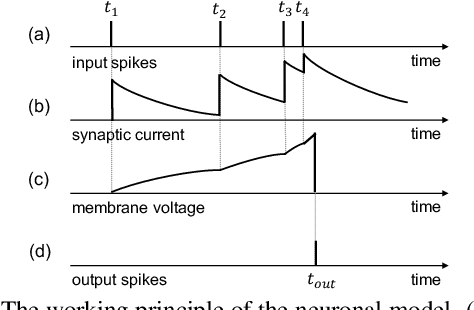
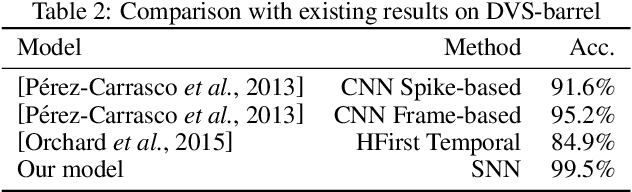
Accurate real-time object recognition from sensory data has long been a crucial and challenging task for autonomous driving. Even though deep neural networks (DNNs) have been successfully applied in this area, most existing methods still heavily rely on the pre-processing of the pulse signals derived from LiDAR sensors, and therefore introduce additional computational overhead and considerable latency. In this paper, we propose an approach to address the object recognition problem directly with raw temporal pulses utilizing the spiking neural network (SNN). Being evaluated on various datasets (including Sim LiDAR, KITTI and DVS-barrel) derived from LiDAR and dynamic vision sensor (DVS), our proposed method has shown comparable performance as the state-of-the-art methods, while achieving remarkable time efficiency. It highlights the SNN's great potentials in autonomous driving and related applications. To the best of our knowledge, this is the first attempt to use SNN to directly perform object recognition on raw temporal pulses.