 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Learning-Driven Multi-Vessel Association: Fusing Multimodal Data for Maritime Intelligence
Apr 12, 2025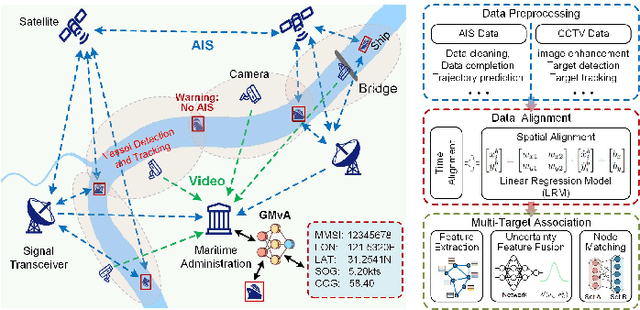
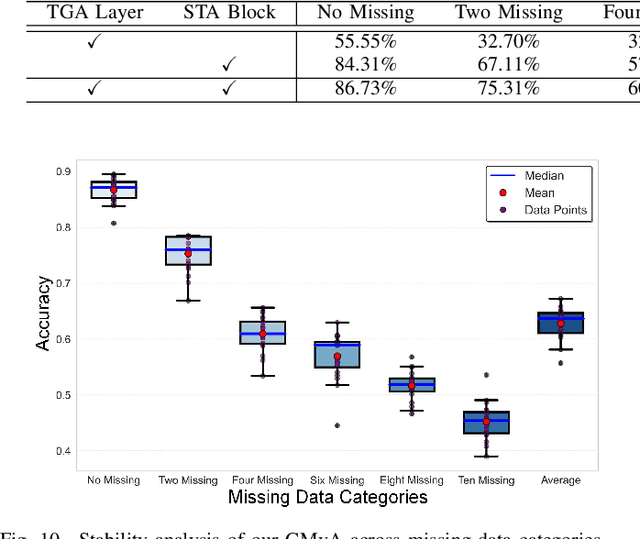
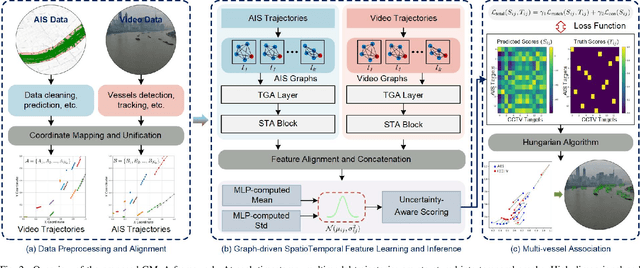
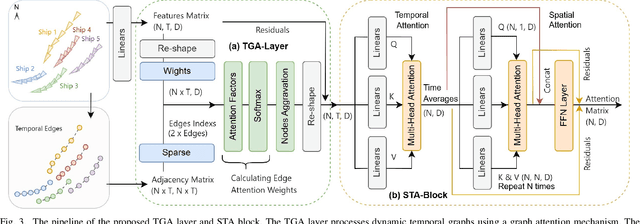
Ensuring maritime safety and optimizing traffic management in increasingly crowded and complex waterways require effective waterway monitoring. However, current methods struggle with challenges arising from multimodal data, such as dimensional disparities, mismatched target counts, vessel scale variations, occlusions, and asynchronous data streams from systems like the automatic identification system (AIS) and closed-circuit television (CCTV). Traditional multi-target association methods often struggle with these complexities, particularly in densely trafficked waterways. To overcome these issues, we propose a graph learning-driven multi-vessel association (GMvA) method tailored for maritime multimodal data fusion. By integrating AIS and CCTV data, GMvA leverages time series learning and graph neural networks to capture the spatiotemporal features of vessel trajectories effectively. To enhance feature representation, the proposed method incorporates temporal graph attention and spatiotemporal attention, effectively capturing both local and global vessel interactions. Furthermore, a multi-layer perceptron-based uncertainty fusion module computes robust similarity scores, and the Hungarian algorithm is adopted to ensure globally consistent and accurate target matching. Extensive experiments on real-world maritime datasets confirm that GMvA delivers superior accuracy and robustness in multi-target association, outperforming existing methods even in challenging scenarios with high vessel density and incomplete or unevenly distributed AIS and CCTV data.
VL-UR: Vision-Language-guided Universal Restoration of Images Degraded by Adverse Weather Conditions
Apr 11, 2025



Image restoration is critical for improving the quality of degraded images, which is vital for applications like autonomous driving, security surveillance, and digital content enhancement. However, existing methods are often tailored to specific degradation scenarios, limiting their adaptability to the diverse and complex challenges in real-world environments. Moreover, real-world degradations are typically non-uniform, highlighting the need for adaptive and intelligent solutions. To address these issues, we propose a novel vision-language-guided universal restoration (VL-UR) framework. VL-UR leverages a zero-shot contrastive language-image pre-training (CLIP) model to enhance image restoration by integrating visual and semantic information. A scene classifier is introduced to adapt CLIP, generating high-quality language embeddings aligned with degraded images while predicting degraded types for complex scenarios. Extensive experiments across eleven diverse degradation settings demonstrate VL-UR's state-of-the-art performance, robustness, and adaptability. This positions VL-UR as a transformative solution for modern image restoration challenges in dynamic, real-world environments.
Multi-Task-oriented Nighttime Haze Imaging Enhancer for Vision-driven Measurement Systems
Feb 11, 2025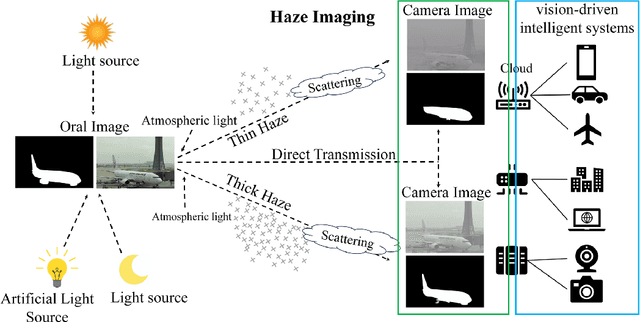
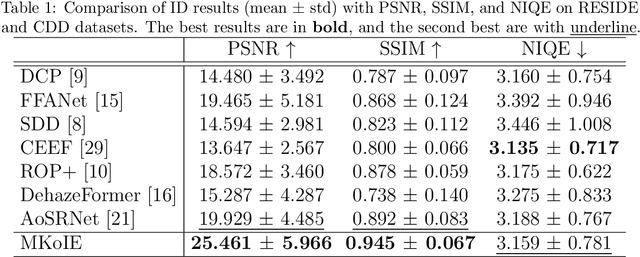
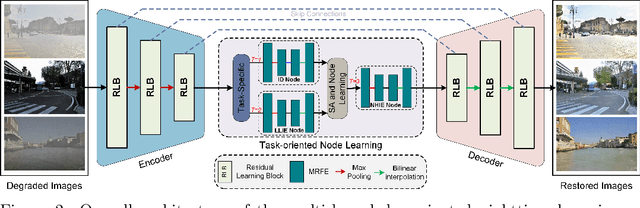
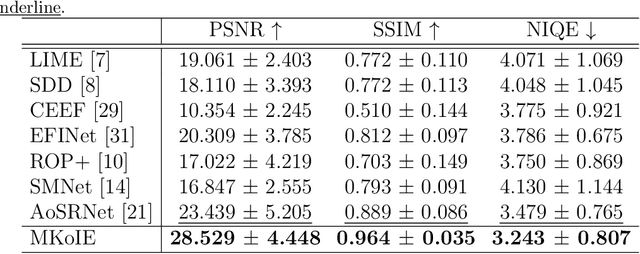
Salient object detection (SOD) plays a critical role in vision-driven measurement systems (VMS), facilitating the detection and segmentation of key visual elements in an image. However, adverse imaging conditions such as haze during the day, low light, and haze at night severely degrade image quality, and complicating the SOD process. To address these challenges, we propose a multi-task-oriented nighttime haze imaging enhancer (MToIE), which integrates three tasks: daytime dehazing, low-light enhancement, and nighttime dehazing. The MToIE incorporates two key innovative components: First, the network employs a task-oriented node learning mechanism to handle three specific degradation types: day-time haze, low light, and night-time haze conditions, with an embedded self-attention module enhancing its performance in nighttime imaging. In addition, multi-receptive field enhancement module that efficiently extracts multi-scale features through three parallel depthwise separable convolution branches with different dilation rates, capturing comprehensive spatial information with minimal computational overhead. To ensure optimal image reconstruction quality and visual characteristics, we suggest a hybrid loss function. Extensive experiments on different types of weather/imaging conditions illustrate that MToIE surpasses existing methods, significantly enhancing the accuracy and reliability of vision systems across diverse imaging scenarios. The code is available at https://github.com/Ai-Chen-Lab/MToIE.
USRNet: Unified Scene Recovery Network for Enhancing Traffic Imaging under Multiple Adverse Weather Conditions
Feb 11, 2025



Advancements in computer vision technology have facilitated the extensive deployment of intelligent transportation systems and visual surveillance systems across various applications, including autonomous driving, public safety, and environmental monitoring. However, adverse weather conditions such as haze, rain, snow, and more complex mixed degradation can significantly degrade image quality. The degradation compromises the accuracy and reliability of these systems across various scenarios. To tackle the challenge of developing adaptable models for scene restoration, we introduce the unified scene recovery network (USRNet), capable of handling multiple types of image degradation. The USRNet features a sophisticated architecture consisting of a scene encoder, an attention-driven node independent learning mechanism (NILM), an edge decoder, and a scene restoration module. The scene encoder, powered by advanced residual blocks, extracts deep features from degraded images in a progressive manner, ensuring thorough encoding of degradation information. To enhance the USRNet's adaptability in diverse weather conditions, we introduce NILM, which enables the network to learn and respond to different scenarios with precision, thereby increasing its robustness. The edge decoder is designed to extract edge features with precision, which is essential for maintaining image sharpness. Experimental results demonstrate that USRNet surpasses existing methods in handling complex imaging degradations, thereby improving the accuracy and reliability of visual systems across diverse scenarios. The code resources for this work can be accessed in https://github.com/LouisYxLu/USRNet.
Real-Time Multi-Scene Visibility Enhancement for Promoting Navigational Safety of Vessels Under Complex Weather Conditions
Sep 02, 2024



The visible-light camera, which is capable of environment perception and navigation assistance, has emerged as an essential imaging sensor for marine surface vessels in intelligent waterborne transportation systems (IWTS). However, the visual imaging quality inevitably suffers from several kinds of degradations (e.g., limited visibility, low contrast, color distortion, etc.) under complex weather conditions (e.g., haze, rain, and low-lightness). The degraded visual information will accordingly result in inaccurate environment perception and delayed operations for navigational risk. To promote the navigational safety of vessels, many computational methods have been presented to perform visual quality enhancement under poor weather conditions. However, most of these methods are essentially specific-purpose implementation strategies, only available for one specific weather type. To overcome this limitation, we propose to develop a general-purpose multi-scene visibility enhancement method, i.e., edge reparameterization- and attention-guided neural network (ERANet), to adaptively restore the degraded images captured under different weather conditions. In particular, our ERANet simultaneously exploits the channel attention, spatial attention, and reparameterization technology to enhance the visual quality while maintaining low computational cost. Extensive experiments conducted on standard and IWTS-related datasets have demonstrated that our ERANet could outperform several representative visibility enhancement methods in terms of both imaging quality and computational efficiency. The superior performance of IWTS-related object detection and scene segmentation could also be steadily obtained after ERANet-based visibility enhancement under complex weather conditions.
* 15 pages, 13 figures
OneRestore: A Universal Restoration Framework for Composite Degradation
Jul 05, 2024



In real-world scenarios, image impairments often manifest as composite degradations, presenting a complex interplay of elements such as low light, haze, rain, and snow. Despite this reality, existing restoration methods typically target isolated degradation types, thereby falling short in environments where multiple degrading factors coexist. To bridge this gap, our study proposes a versatile imaging model that consolidates four physical corruption paradigms to accurately represent complex, composite degradation scenarios. In this context, we propose OneRestore, a novel transformer-based framework designed for adaptive, controllable scene restoration. The proposed framework leverages a unique cross-attention mechanism, merging degraded scene descriptors with image features, allowing for nuanced restoration. Our model allows versatile input scene descriptors, ranging from manual text embeddings to automatic extractions based on visual attributes. Our methodology is further enhanced through a composite degradation restoration loss, using extra degraded images as negative samples to fortify model constraints. Comparative results on synthetic and real-world datasets demonstrate OneRestore as a superior solution, significantly advancing the state-of-the-art in addressing complex, composite degradations.
AoSRNet: All-in-One Scene Recovery Networks via Multi-knowledge Integration
Feb 06, 2024



Scattering and attenuation of light in no-homogeneous imaging media or inconsistent light intensity will cause insufficient contrast and color distortion in the collected images, which limits the developments such as vision-driven smart urban, autonomous vehicles, and intelligent robots. In this paper, we propose an all-in-one scene recovery network via multi-knowledge integration (termed AoSRNet) to improve the visibility of imaging devices in typical low-visibility imaging scenes (e.g., haze, sand dust, and low light). It combines gamma correction (GC) and optimized linear stretching (OLS) to create the detail enhancement module (DEM) and color restoration module (CRM). Additionally, we suggest a multi-receptive field extraction module (MEM) to attenuate the loss of image texture details caused by GC nonlinear and OLS linear transformations. Finally, we refine the coarse features generated by DEM, CRM, and MEM through Encoder-Decoder to generate the final restored image. Comprehensive experimental results demonstrate the effectiveness and stability of AoSRNet compared to other state-of-the-art methods. The source code is available at \url{https://github.com/LouisYuxuLu/AoSRNet}.
MvKSR: Multi-view Knowledge-guided Scene Recovery for Hazy and Rainy Degradation
Jan 09, 2024



High-quality imaging is crucial for ensuring safety supervision and intelligent deployment in fields like transportation and industry. It enables precise and detailed monitoring of operations, facilitating timely detection of potential hazards and efficient management. However, adverse weather conditions, such as atmospheric haziness and precipitation, can have a significant impact on image quality. When the atmosphere contains dense haze or water droplets, the incident light scatters, leading to degraded captured images. This degradation is evident in the form of image blur and reduced contrast, increasing the likelihood of incorrect assessments and interpretations by intelligent imaging systems (IIS). To address the challenge of restoring degraded images in hazy and rainy conditions, this paper proposes a novel multi-view knowledge-guided scene recovery network (termed MvKSR). Specifically, guided filtering is performed on the degraded image to separate high/low-frequency components. Subsequently, an en-decoder-based multi-view feature coarse extraction module (MCE) is used to coarsely extract features from different views of the degraded image. The multi-view feature fine fusion module (MFF) will learn and infer the restoration of degraded images through mixed supervision under different views. Additionally, we suggest an atrous residual block to handle global restoration and local repair in hazy/rainy/mixed scenes. Extensive experimental results demonstrate that MvKSR outperforms other state-of-the-art methods in terms of efficiency and stability for restoring degraded scenarios in IIS.
SCANet: Self-Paced Semi-Curricular Attention Network for Non-Homogeneous Image Dehazing
Apr 17, 2023


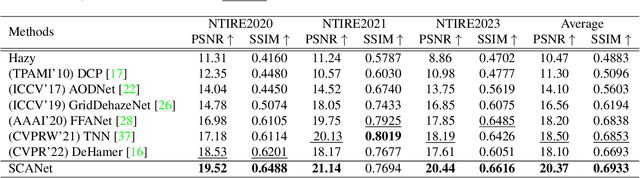
The presence of non-homogeneous haze can cause scene blurring, color distortion, low contrast, and other degradations that obscure texture details. Existing homogeneous dehazing methods struggle to handle the non-uniform distribution of haze in a robust manner. The crucial challenge of non-homogeneous dehazing is to effectively extract the non-uniform distribution features and reconstruct the details of hazy areas with high quality. In this paper, we propose a novel self-paced semi-curricular attention network, called SCANet, for non-homogeneous image dehazing that focuses on enhancing haze-occluded regions. Our approach consists of an attention generator network and a scene reconstruction network. We use the luminance differences of images to restrict the attention map and introduce a self-paced semi-curricular learning strategy to reduce learning ambiguity in the early stages of training. Extensive quantitative and qualitative experiments demonstrate that our SCANet outperforms many state-of-the-art methods. The code is publicly available at https://github.com/gy65896/SCANet.
Asynchronous Trajectory Matching-Based Multimodal Maritime Data Fusion for Vessel Traffic Surveillance in Inland Waterways
Feb 22, 2023



The automatic identification system (AIS) and video cameras have been widely exploited for vessel traffic surveillance in inland waterways. The AIS data could provide the vessel identity and dynamic information on vessel position and movements. In contrast, the video data could describe the visual appearances of moving vessels, but without knowing the information on identity, position and movements, etc. To further improve vessel traffic surveillance, it becomes necessary to fuse the AIS and video data to simultaneously capture the visual features, identity and dynamic information for the vessels of interest. However, traditional data fusion methods easily suffer from several potential limitations, e.g., asynchronous messages, missing data, random outliers, etc. In this work, we first extract the AIS- and video-based vessel trajectories, and then propose a deep learning-enabled asynchronous trajectory matching method (named DeepSORVF) to fuse the AIS-based vessel information with the corresponding visual targets. In addition, by combining the AIS- and video-based movement features, we also present a prior knowledge-driven anti-occlusion method to yield accurate and robust vessel tracking results under occlusion conditions. To validate the efficacy of our DeepSORVF, we have also constructed a new benchmark dataset (termed FVessel) for vessel detection, tracking, and data fusion. It consists of many videos and the corresponding AIS data collected in various weather conditions and locations. The experimental results have demonstrated that our method is capable of guaranteeing high-reliable data fusion and anti-occlusion vessel tracking.