 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Task-oriented Nighttime Haze Imaging Enhancer for Vision-driven Measurement Systems
Feb 11, 2025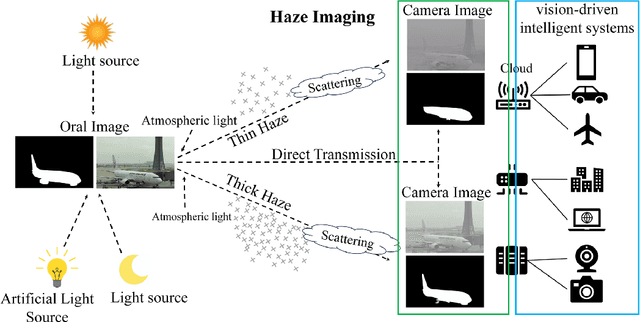
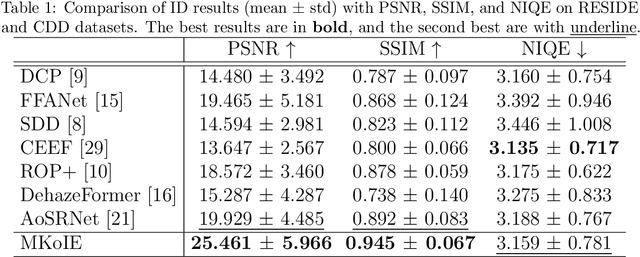
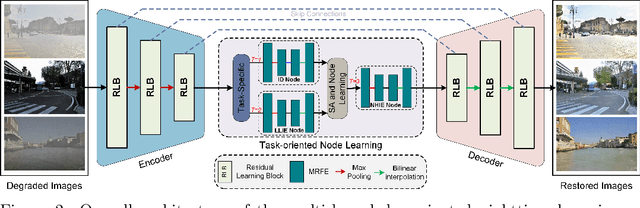
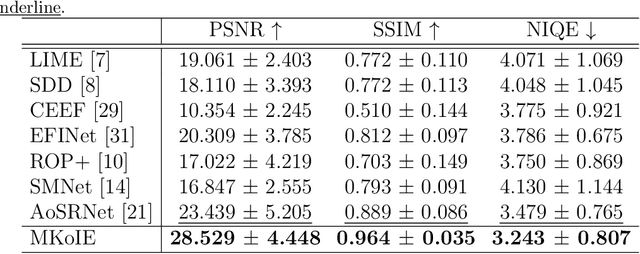
Salient object detection (SOD) plays a critical role in vision-driven measurement systems (VMS), facilitating the detection and segmentation of key visual elements in an image. However, adverse imaging conditions such as haze during the day, low light, and haze at night severely degrade image quality, and complicating the SOD process. To address these challenges, we propose a multi-task-oriented nighttime haze imaging enhancer (MToIE), which integrates three tasks: daytime dehazing, low-light enhancement, and nighttime dehazing. The MToIE incorporates two key innovative components: First, the network employs a task-oriented node learning mechanism to handle three specific degradation types: day-time haze, low light, and night-time haze conditions, with an embedded self-attention module enhancing its performance in nighttime imaging. In addition, multi-receptive field enhancement module that efficiently extracts multi-scale features through three parallel depthwise separable convolution branches with different dilation rates, capturing comprehensive spatial information with minimal computational overhead. To ensure optimal image reconstruction quality and visual characteristics, we suggest a hybrid loss function. Extensive experiments on different types of weather/imaging conditions illustrate that MToIE surpasses existing methods, significantly enhancing the accuracy and reliability of vision systems across diverse imaging scenarios. The code is available at https://github.com/Ai-Chen-Lab/MToIE.
USRNet: Unified Scene Recovery Network for Enhancing Traffic Imaging under Multiple Adverse Weather Conditions
Feb 11, 2025



Advancements in computer vision technology have facilitated the extensive deployment of intelligent transportation systems and visual surveillance systems across various applications, including autonomous driving, public safety, and environmental monitoring. However, adverse weather conditions such as haze, rain, snow, and more complex mixed degradation can significantly degrade image quality. The degradation compromises the accuracy and reliability of these systems across various scenarios. To tackle the challenge of developing adaptable models for scene restoration, we introduce the unified scene recovery network (USRNet), capable of handling multiple types of image degradation. The USRNet features a sophisticated architecture consisting of a scene encoder, an attention-driven node independent learning mechanism (NILM), an edge decoder, and a scene restoration module. The scene encoder, powered by advanced residual blocks, extracts deep features from degraded images in a progressive manner, ensuring thorough encoding of degradation information. To enhance the USRNet's adaptability in diverse weather conditions, we introduce NILM, which enables the network to learn and respond to different scenarios with precision, thereby increasing its robustness. The edge decoder is designed to extract edge features with precision, which is essential for maintaining image sharpness. Experimental results demonstrate that USRNet surpasses existing methods in handling complex imaging degradations, thereby improving the accuracy and reliability of visual systems across diverse scenarios. The code resources for this work can be accessed in https://github.com/LouisYxLu/USRNet.