 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormat-Constraint Coupling in Knowledge Graph Construction from Statistical Tables
May 21, 2026An extraction schema should not reduce knowledge graph fidelity. On statistical CSV, however, it can. We study country-by-year time-series matrices, a common layout on open-data portals. In this setting, serialization format and schema constraints interact super-additively. Their joint effect exceeds the sum of independent effects by up to +1.180 (2x2 factorial, 6 datasets). Bootstrap 95% CIs are strictly positive on 4/6 datasets, with strongest evidence on wide Type-II matrices. More critically, a schema applied to a mismatched format can trigger catastrophic mismatch. Fact coverage falls below the unconstrained baseline on 4/6 datasets through entity inflation or extraction refusal. We call this observed pattern format-constraint coupling. Probing and token ablation support a surface-form anchoring explanation centred on column-name references. Controlled variants across format-schema pairings, GraphRAG hosts, and LLM families show the same direction within the measured scope; one LLM family shows only partial activation. The observation also has a diagnostic consequence. Three standard retrieval modes largely mask construction quality (delta <= 1pp), whereas direct graph access exposes gaps up to +47.6pp (p < 0.0001). To support fidelity-aware evaluation, we release CSVFidelity-Bench. It contains 15 datasets, 11 Type-II matrices, 4 Type-III tables, and 1,892 Gold Standard facts across 6 domains.
NEWTON: Agentic Planning for Physically Grounded Video Generation
May 19, 2026Video generation models produce visually compelling results but systematically violate physical commonsense -- on VideoPhy-2, the best model achieves only 32.6% joint accuracy. We identify a specification bottleneck: text prompts are lossy compression of the physical world, omitting the parameters that fully determine dynamics, and no amount of model scaling can recover what was never specified. From this diagnosis we derive three properties that physics conditioning must satisfy -- sufficiency, dynamism, and verifiability -- and show that no existing approach satisfies all three. We present NEWTON, in which video generation is demoted from the system output to one action inside an agent's toolbox: a learned planner orchestrates physics-aware tools (keyframe generation, scientific computation, prompt refinement) to construct rich conditioning, and a verifier closes the loop for iterative re-planning. The planner is the sole trainable component, optimized on-policy via Flow-GRPO inside the live multi-turn loop. On VideoPhy-2, NEWTON improves joint accuracy from 21.4% to 29.7% on LTX-Video and from 30.7% to 37.4% on Veo-3.1, without modifying either generator. Our project page: https://Newton026.github.io/newton
AD-CARE: A Guideline-grounded, Modality-agnostic LLM Agent for Real-world Alzheimer's Disease Diagnosis with Multi-cohort Assessment, Fairness Analysis, and Reader Study
Mar 26, 2026Alzheimer's disease (AD) is a growing global health challenge as populations age, and timely, accurate diagnosis is essential to reduce individual and societal burden. However, real-world AD assessment is hampered by incomplete, heterogeneous multimodal data and variability across sites and patient demographics. Although large language models (LLMs) have shown promise in biomedicine, their use in AD has largely been confined to answering narrow, disease-specific questions rather than generating comprehensive diagnostic reports that support clinical decision-making. Here we expand LLM capabilities for clinical decision support by introducing AD-CARE, a modality-agnostic agent that performs guideline-grounded diagnostic assessment from incomplete, heterogeneous inputs without imputing missing modalities. By dynamically orchestrating specialized diagnostic tools and embedding clinical guidelines into LLM-driven reasoning, AD-CARE generates transparent, report-style outputs aligned with real-world clinical workflows. Across six cohorts comprising 10,303 cases, AD-CARE achieved 84.9% diagnostic accuracy, delivering 4.2%-13.7% relative improvements over baseline methods. Despite cohort-level differences, dataset-specific accuracies remain robust (80.4%-98.8%), and the agent consistently outperforms all baselines. AD-CARE reduced performance disparities across racial and age subgroups, decreasing the average dispersion of four metrics by 21%-68% and 28%-51%, respectively. In a controlled reader study, the agent improved neurologist and radiologist accuracy by 6%-11% and more than halved decision time. The framework yielded 2.29%-10.66% absolute gains over eight backbone LLMs and converges their performance. These results show that AD-CARE is a scalable, practically deployable framework that can be integrated into routine clinical workflows for multimodal decision support in AD.
Ill-Conditioning in Dictionary-Based Dynamic-Equation Learning: A Systems Biology Case Study
Mar 11, 2026Data-driven discovery of governing equations from time-series data provides a powerful framework for understanding complex biological systems. Library-based approaches that use sparse regression over candidate functions have shown considerable promise, but they face a critical challenge when candidate functions become strongly correlated: numerical ill-conditioning. Poor or restricted sampling, together with particular choices of candidate libraries, can produce strong multicollinearity and numerical instability. In such cases, measurement noise may lead to widely different recovered models, obscuring the true underlying dynamics and hindering accurate system identification. Although sparse regularization promotes parsimonious solutions and can partially mitigate conditioning issues, strong correlations may persist, regularization may bias the recovered models, and the regression problem may remain highly sensitive to small perturbations in the data. We present a systematic analysis of how ill-conditioning affects sparse identification of biological dynamics using benchmark models from systems biology. We show that combinations involving as few as two or three terms can already exhibit strong multicollinearity and extremely large condition numbers. We further show that orthogonal polynomial bases do not consistently resolve ill-conditioning and can perform worse than monomial libraries when the data distribution deviates from the weight function associated with the orthogonal basis. Finally, we demonstrate that when data are sampled from distributions aligned with the appropriate weight functions corresponding to the orthogonal basis, numerical conditioning improves, and orthogonal polynomial bases can yield improved model recovery accuracy across two baseline models.
Guided by the Plan: Enhancing Faithful Autoregressive Text-to-Audio Generation with Guided Decoding
Jan 18, 2026Autoregressive (AR) models excel at generating temporally coherent audio by producing tokens sequentially, yet they often falter in faithfully following complex textual prompts, especially those describing complex sound events. We uncover a surprising capability in AR audio generators: their early prefix tokens implicitly encode global semantic attributes of the final output, such as event count and sound-object category, revealing a form of implicit planning. Building on this insight, we propose Plan-Critic, a lightweight auxiliary model trained with a Generalized Advantage Estimation (GAE)-inspired objective to predict final instruction-following quality from partial generations. At inference time, Plan-Critic enables guided exploration: it evaluates candidate prefixes early, prunes low-fidelity trajectories, and reallocates computation to high-potential planning seeds. Our Plan-Critic-guided sampling achieves up to a 10-point improvement in CLAP score over the AR baseline-establishing a new state of the art in AR text-to-audio generation-while maintaining computational parity with standard best-of-N decoding. This work bridges the gap between causal generation and global semantic alignment, demonstrating that even strictly autoregressive models can plan ahead.
Think Before You Move: Latent Motion Reasoning for Text-to-Motion Generation
Dec 30, 2025Current state-of-the-art paradigms predominantly treat Text-to-Motion (T2M) generation as a direct translation problem, mapping symbolic language directly to continuous poses. While effective for simple actions, this System 1 approach faces a fundamental theoretical bottleneck we identify as the Semantic-Kinematic Impedance Mismatch: the inherent difficulty of grounding semantically dense, discrete linguistic intent into kinematically dense, high-frequency motion data in a single shot. In this paper, we argue that the solution lies in an architectural shift towards Latent System 2 Reasoning. Drawing inspiration from Hierarchical Motor Control in cognitive science, we propose Latent Motion Reasoning (LMR) that reformulates generation as a two-stage Think-then-Act decision process. Central to LMR is a novel Dual-Granularity Tokenizer that disentangles motion into two distinct manifolds: a compressed, semantically rich Reasoning Latent for planning global topology, and a high-frequency Execution Latent for preserving physical fidelity. By forcing the model to autoregressively reason (plan the coarse trajectory) before it moves (instantiates the frames), we effectively bridge the ineffability gap between language and physics. We demonstrate LMR's versatility by implementing it for two representative baselines: T2M-GPT (discrete) and MotionStreamer (continuous). Extensive experiments show that LMR yields non-trivial improvements in both semantic alignment and physical plausibility, validating that the optimal substrate for motion planning is not natural language, but a learned, motion-aligned concept space. Codes and demos can be found in \hyperlink{https://chenhaoqcdyq.github.io/LMR/}{https://chenhaoqcdyq.github.io/LMR/}
The first calibration model for bluetooth angle of arrival: Enhancing positioning accuracy in indoor environments
Jan 15, 2025Internet of Things (IoT) applications are increasingly reliant on indoor positioning systems to deliver precise and reliable navigation in GNSS-denied environments, including urban areas, smart warehouses, hospitals, and underground or multi-level parking systems. Bluetooth Angle of Arrival (AoA) positioning offers cost-effective solutions with the potential to provide users with sub-meter position accuracy, which is crucial for applications such as underground navigation, firefighters, and robotic navigation. Bluetooth AoA positioning uses angles to determine the position of Bluetooth tags; these angles, measured in the anchor coordinate system, need to be transferred to the user's coordinate system. This requires models or techniques to compute 3D rotation matrices between the anchor and user coordinate system. Until now, no model or technique has been developed to compute these rotation matrices. Therefore, the development of the AoA positioning model focuses on simulated scenarios. This paper introduces the first model, named the AoA calibration model, capable of estimating these rotation matrices, thereby facilitating the practical application of this technology. In addition, this paper tests the Bluetooth AoA calibration and positioning model on a real dataset and presents end-toend functional architectures for AoA positioning. The results demonstrate that the proposed calibration model can estimate the 3D transformation rotation angles with a standard deviation better than 2.5 degrees. The findings also reveal that AoA positioning can achieve sub-meter accuracy in both static and kinematic modes, with accuracy significantly influenced by the distance to the anchors and the geometry factor.
Driving in the Occupancy World: Vision-Centric 4D Occupancy Forecasting and Planning via World Models for Autonomous Driving
Aug 26, 2024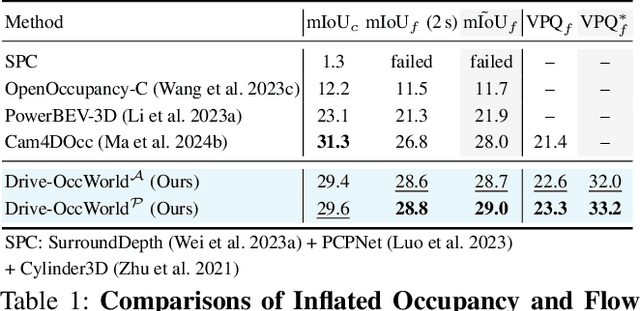
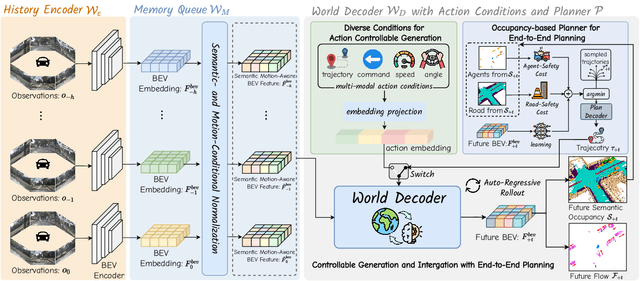
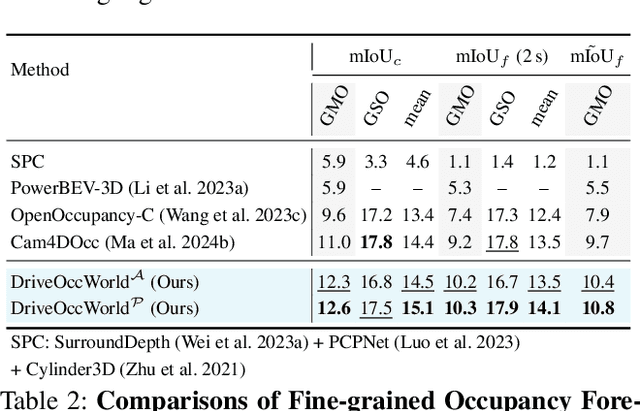
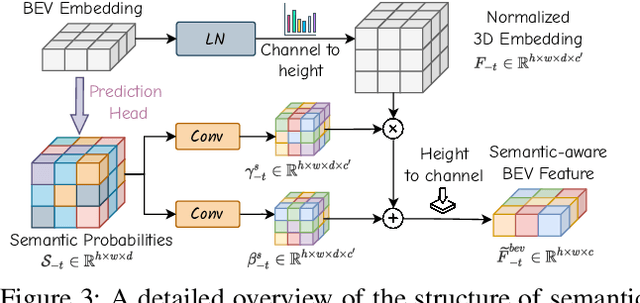
World models envision potential future states based on various ego actions. They embed extensive knowledge about the driving environment, facilitating safe and scalable autonomous driving. Most existing methods primarily focus on either data generation or the pretraining paradigms of world models. Unlike the aforementioned prior works, we propose Drive-OccWorld, which adapts a vision-centric 4D forecasting world model to end-to-end planning for autonomous driving. Specifically, we first introduce a semantic and motion-conditional normalization in the memory module, which accumulates semantic and dynamic information from historical BEV embeddings. These BEV features are then conveyed to the world decoder for future occupancy and flow forecasting, considering both geometry and spatiotemporal modeling. Additionally, we propose injecting flexible action conditions, such as velocity, steering angle, trajectory, and commands, into the world model to enable controllable generation and facilitate a broader range of downstream applications. Furthermore, we explore integrating the generative capabilities of the 4D world model with end-to-end planning, enabling continuous forecasting of future states and the selection of optimal trajectories using an occupancy-based cost function. Extensive experiments on the nuScenes dataset demonstrate that our method can generate plausible and controllable 4D occupancy, opening new avenues for driving world generation and end-to-end planning.
Enhancing Autonomous Vehicle Training with Language Model Integration and Critical Scenario Generation
Apr 12, 2024



This paper introduces CRITICAL, a novel closed-loop framework for autonomous vehicle (AV) training and testing. CRITICAL stands out for its ability to generate diverse scenarios, focusing on critical driving situations that target specific learning and performance gaps identified in the Reinforcement Learning (RL) agent. The framework achieves this by integrating real-world traffic dynamics, driving behavior analysis, surrogate safety measures, and an optional Large Language Model (LLM) component. It is proven that the establishment of a closed feedback loop between the data generation pipeline and the training process can enhance the learning rate during training, elevate overall system performance, and augment safety resilience. Our evaluations, conducted using the Proximal Policy Optimization (PPO) and the HighwayEnv simulation environment, demonstrate noticeable performance improvements with the integration of critical case generation and LLM analysis, indicating CRITICAL's potential to improve the robustness of AV systems and streamline the generation of critical scenarios. This ultimately serves to hasten the development of AV agents, expand the general scope of RL training, and ameliorate validation efforts for AV safety.
Adaptive Road Configurations for Improved Autonomous Vehicle-Pedestrian Interactions using Reinforcement Learning
Mar 22, 2023
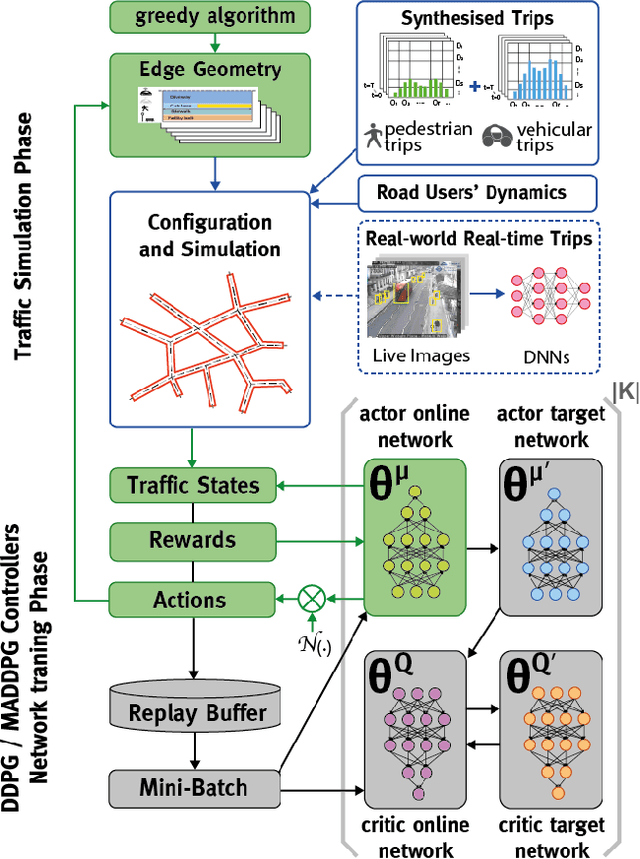


The deployment of Autonomous Vehicles (AVs) poses considerable challenges and unique opportunities for the design and management of future urban road infrastructure. In light of this disruptive transformation, the Right-Of-Way (ROW) composition of road space has the potential to be renewed. Design approaches and intelligent control models have been proposed to address this problem, but we lack an operational framework that can dynamically generate ROW plans for AVs and pedestrians in response to real-time demand. Based on microscopic traffic simulation, this study explores Reinforcement Learning (RL) methods for evolving ROW compositions. We implement a centralised paradigm and a distributive learning paradigm to separately perform the dynamic control on several road network configurations. Experimental results indicate that the algorithms have the potential to improve traffic flow efficiency and allocate more space for pedestrians. Furthermore, the distributive learning algorithm outperforms its centralised counterpart regarding computational cost (49.55\%), benchmark rewards (25.35\%), best cumulative rewards (24.58\%), optimal actions (13.49\%) and rate of convergence. This novel road management technique could potentially contribute to the flow-adaptive and active mobility-friendly streets in the AVs era.
* 11 pages, 7 figures, Copyright \c{opyright} 2023, IEEE