 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Your Posts Reveal: A Benchmark and Agentic Framework for User-Level Privacy Leakage on Social Media
Jun 05, 2026Public social media posts can reveal private information through weak cues scattered across text, images, or metadata. Such leakage is often cumulative and cross-post: cues that appear harmless in isolation may jointly expose a user's home, workplace, or routine. However, current research lacks a unified benchmark for user-level multimodal privacy leakage and an evaluation metric that captures exposure severity beyond binary accuracy. To address these gaps, we propose SopriBench, a synthetic benchmark guided by leakage patterns abstracted from a private reference corpus of Rednote and Instagram accounts, covering 50 user profiles and 1,569 images with attributes, contextual sensitivity, granularity, leakage type, inference difficulty, and supporting evidence. We further introduce the Privacy Exposure Score (PES), which weights value granularity by contextual sensitivity. Inspired by abductive reasoning, we introduce Argus, a training-free agentic framework for cumulative leakage inference. Argus forms hypotheses from accumulated evidence, verifies supporting evidence, and aggregates cross-post cues into privacy profiles, achieving 0.55 PES, a 25% improvement over the strongest baseline, with the largest gain on cross-post leakage.
Behind EvoMap: Characterizing a Self-Evolving Agent-to-Agent Collaboration Network
May 27, 2026Agent-to-Agent (A2A) networks enable autonomous AI agents to collaborate by sharing reusable problem-solving instructions. However, how these decentralized ecosystems operate in practice remains largely unexplored. We present the first large-scale empirical study of EvoMap, a prominent A2A collaboration network. By analyzing over 1.5M assets and 128K agents, we show how design choices that prioritize scalable growth introduce trade-offs in reusability, evolution, and auditability. First, EvoMap's credit economy rewards agents for publishing valuable assets. Although this design encourages participation at scale, rewards are tied primarily to publication rather than adoption. This leads agents to mass-produce assets to accumulate credits. As a result, 98% of assets are never reused, while rewards become highly concentrated among a small fraction of agents. Second, EvoMap employs an algorithm (referred to as GDI) to score and rank the quality of these shared assets. We demonstrate that this scoring system is flawed: rather than measuring objective performance, an asset's rank is heavily dictated by unverified, self-reported metadata (e.g., claimed lines of code modified). This allows agents to trivially manipulate their asset's scores. Finally, EvoMap relies on agents to provide local execution logs as evidence that uploaded assets function correctly. Because these validations are not independently verified, over 84% of approved assets bypass quality checks using vacuous tests (e.g., console$.$log()). Our findings show that future A2A collaboration networks cannot rely on unverified self-reporting alone. Scalable collaboration requires mechanisms that balance open participation with verifiable execution and trustworthy evaluation.
Source Coverage and Citation Bias in LLM-based vs. Traditional Search Engines
Dec 10, 2025LLM-based Search Engines (LLM-SEs) introduces a new paradigm for information seeking. Unlike Traditional Search Engines (TSEs) (e.g., Google), these systems summarize results, often providing limited citation transparency. The implications of this shift remain largely unexplored, yet raises key questions regarding trust and transparency. In this paper, we present a large-scale empirical study of LLM-SEs, analyzing 55,936 queries and the corresponding search results across six LLM-SEs and two TSEs. We confirm that LLM-SEs cites domain resources with greater diversity than TSEs. Indeed, 37% of domains are unique to LLM-SEs. However, certain risks still persist: LLM-SEs do not outperform TSEs in credibility, political neutrality and safety metrics. Finally, to understand the selection criteria of LLM-SEs, we perform a feature-based analysis to identify key factors influencing source choice. Our findings provide actionable insights for end users, website owners, and developers.
Adaptive Road Configurations for Improved Autonomous Vehicle-Pedestrian Interactions using Reinforcement Learning
Mar 22, 2023


The deployment of Autonomous Vehicles (AVs) poses considerable challenges and unique opportunities for the design and management of future urban road infrastructure. In light of this disruptive transformation, the Right-Of-Way (ROW) composition of road space has the potential to be renewed. Design approaches and intelligent control models have been proposed to address this problem, but we lack an operational framework that can dynamically generate ROW plans for AVs and pedestrians in response to real-time demand. Based on microscopic traffic simulation, this study explores Reinforcement Learning (RL) methods for evolving ROW compositions. We implement a centralised paradigm and a distributive learning paradigm to separately perform the dynamic control on several road network configurations. Experimental results indicate that the algorithms have the potential to improve traffic flow efficiency and allocate more space for pedestrians. Furthermore, the distributive learning algorithm outperforms its centralised counterpart regarding computational cost (49.55\%), benchmark rewards (25.35\%), best cumulative rewards (24.58\%), optimal actions (13.49\%) and rate of convergence. This novel road management technique could potentially contribute to the flow-adaptive and active mobility-friendly streets in the AVs era.
* 11 pages, 7 figures, Copyright \c{opyright} 2023, IEEE
Location-Routing Planning for Last-Mile Deliveries Using Mobile Parcel Lockers: A Hybrid Q-Learning Network Approach
Sep 09, 2022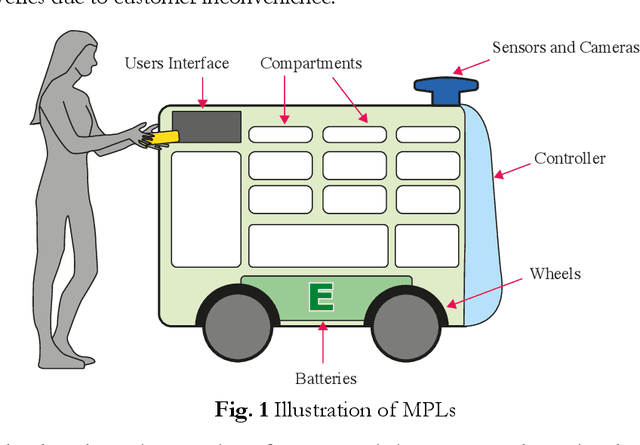
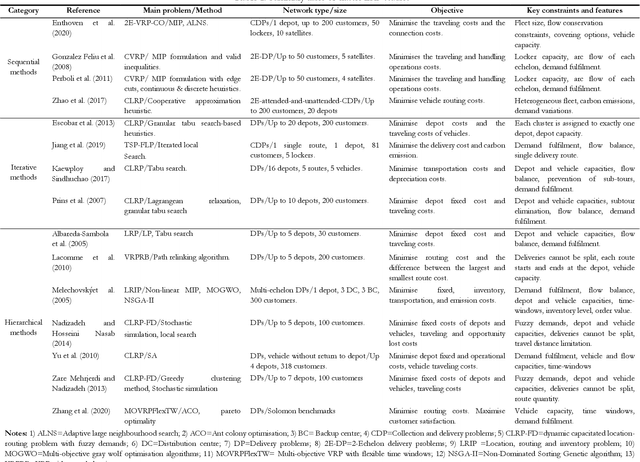

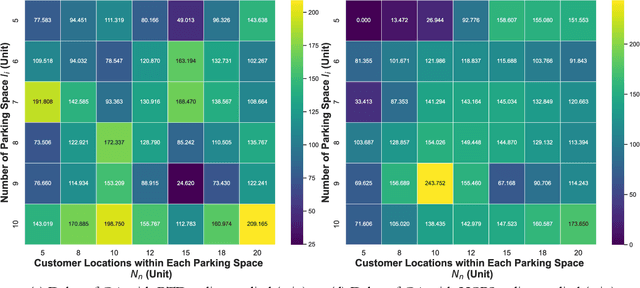
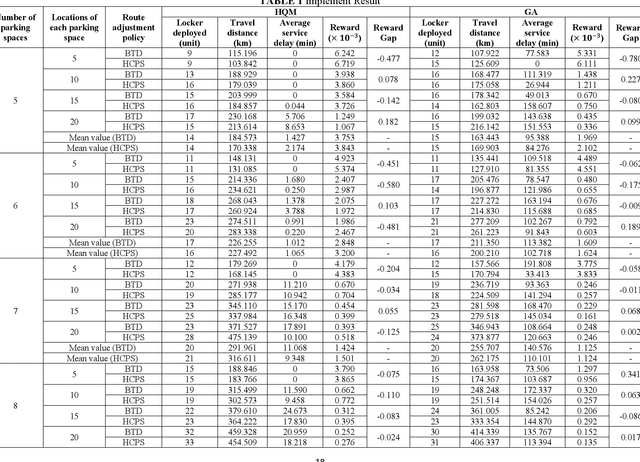
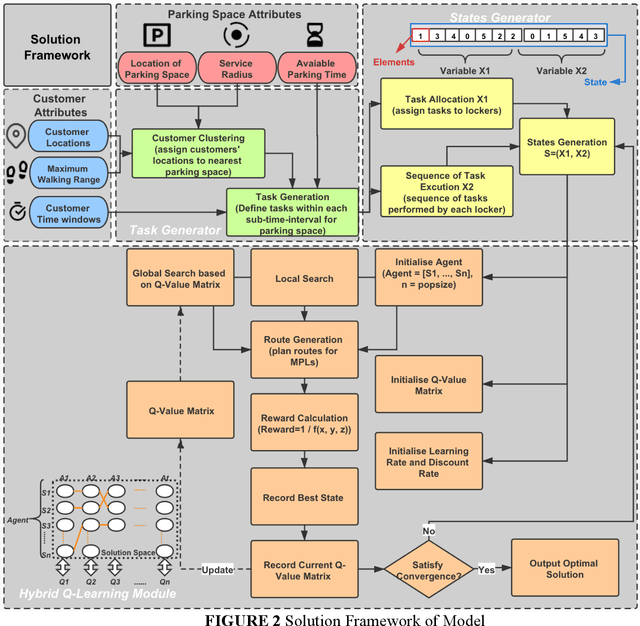
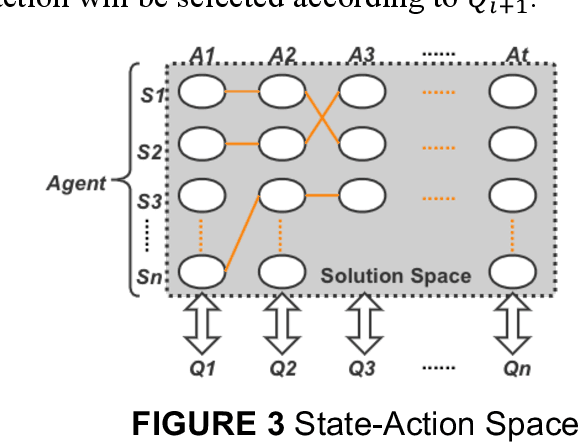
Mobile parcel lockers (MPLs) have been recently proposed by logistics operators as a technology that could help reduce traffic congestion and operational costs in urban freight distribution. Given their ability to relocate throughout their area of deployment, they hold the potential to improve customer accessibility and convenience. In this study, we formulate the Mobile Parcel Locker Problem (MPLP), a special case of the Location-Routing Problem (LRP) which determines the optimal stopover location for MPLs throughout the day and plans corresponding delivery routes. A Hybrid Q-Learning-Network-based Method (HQM) is developed to resolve the computational complexity of the resulting large problem instances while escaping local optima. In addition, the HQM is integrated with global and local search mechanisms to resolve the dilemma of exploration and exploitation faced by classic reinforcement learning (RL) methods. We examine the performance of HQM under different problem sizes (up to 200 nodes) and benchmarked it against the Genetic Algorithm (GA). Our results indicate that the average reward obtained by HQM is 1.96 times greater than GA, which demonstrates that HQM has a better optimisation ability. Finally, we identify critical factors that contribute to fleet size requirements, travel distances, and service delays. Our findings outline that the efficiency of MPLs is mainly contingent on the length of time windows and the deployment of MPL stopovers.
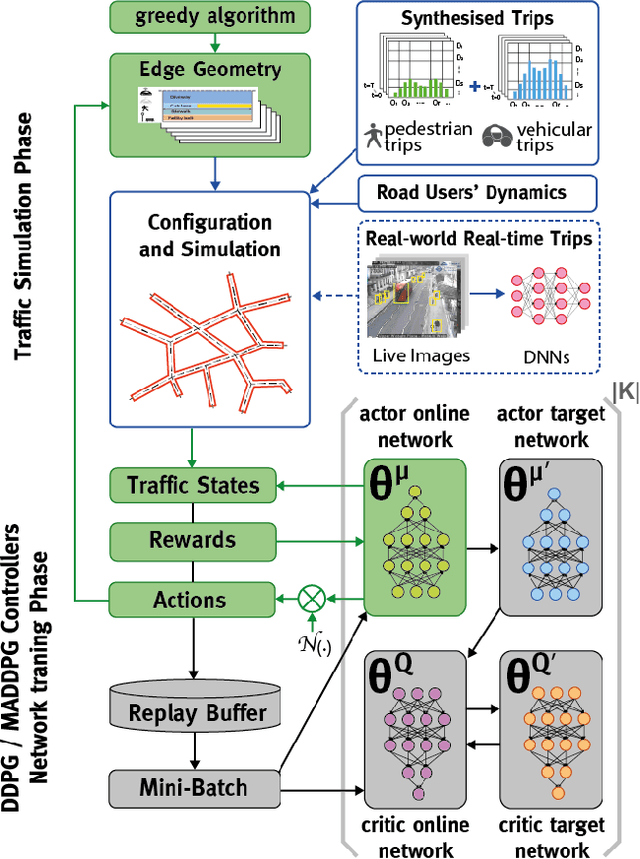
A Reinforcement Learning-based Adaptive Control Model for Future Street Planning, An Algorithm and A Case Study
Dec 10, 2021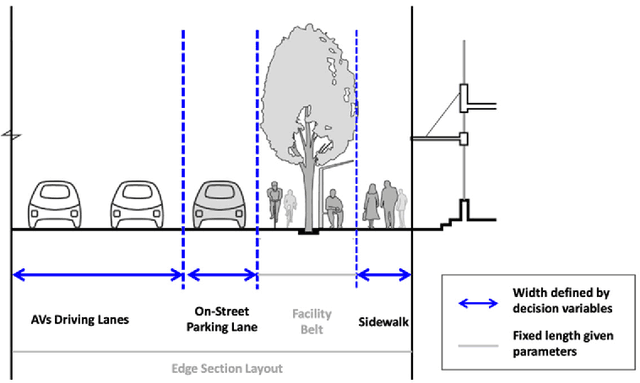

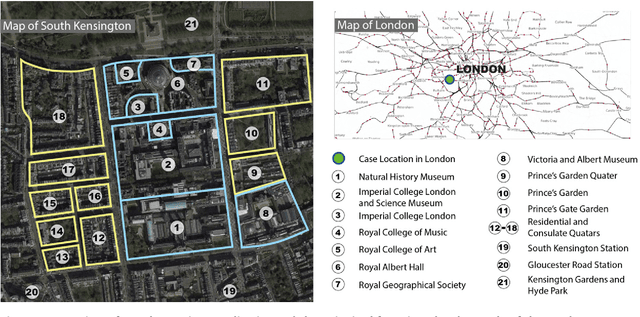
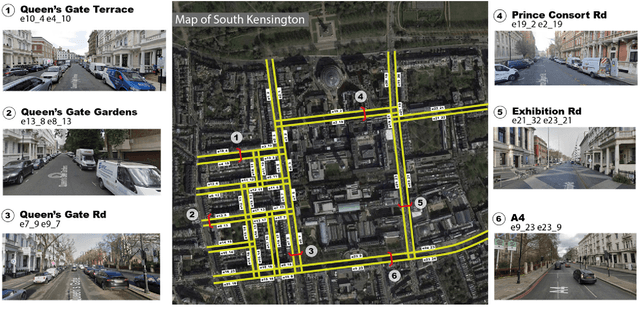
With the emerging technologies in Intelligent Transportation System (ITS), the adaptive operation of road space is likely to be realised within decades. An intelligent street can learn and improve its decision-making on the right-of-way (ROW) for road users, liberating more active pedestrian space while maintaining traffic safety and efficiency. However, there is a lack of effective controlling techniques for these adaptive street infrastructures. To fill this gap in existing studies, we formulate this control problem as a Markov Game and develop a solution based on the multi-agent Deep Deterministic Policy Gradient (MADDPG) algorithm. The proposed model can dynamically assign ROW for sidewalks, autonomous vehicles (AVs) driving lanes and on-street parking areas in real-time. Integrated with the SUMO traffic simulator, this model was evaluated using the road network of the South Kensington District against three cases of divergent traffic conditions: pedestrian flow rates, AVs traffic flow rates and parking demands. Results reveal that our model can achieve an average reduction of 3.87% and 6.26% in street space assigned for on-street parking and vehicular operations. Combined with space gained by limiting the number of driving lanes, the average proportion of sidewalks to total widths of streets can significantly increase by 10.13%.
Location-routing Optimisation for Urban Logistics Using Mobile Parcel Locker Based on Hybrid Q-Learning Algorithm
Oct 29, 2021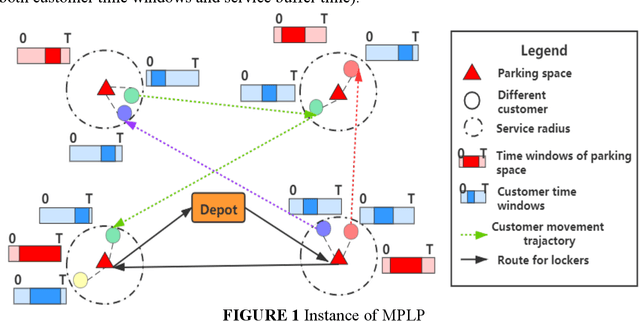
Mobile parcel lockers (MPLs) have been recently introduced by urban logistics operators as a means to reduce traffic congestion and operational cost. Their capability to relocate their position during the day has the potential to improve customer accessibility and convenience (if deployed and planned accordingly), allowing customers to collect parcels at their preferred time among one of the multiple locations. This paper proposes an integer programming model to solve the Location Routing Problem for MPLs to determine the optimal configuration and locker routes. In solving this model, a Hybrid Q-Learning algorithm-based Method (HQM) integrated with global and local search mechanisms is developed, the performance of which is examined for different problem sizes and benchmarked with genetic algorithms. Furthermore, we introduced two route adjustment strategies to resolve stochastic events that may cause delays. The results show that HQM achieves 443.41% improvement on average in solution improvement, compared with the 94.91% improvement of heuristic counterparts, suggesting HQM enables a more efficient search for better solutions. Finally, we identify critical factors that contribute to service delays and investigate their effects.