 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Road Configurations for Improved Autonomous Vehicle-Pedestrian Interactions using Reinforcement Learning
Mar 22, 2023The deployment of Autonomous Vehicles (AVs) poses considerable challenges and unique opportunities for the design and management of future urban road infrastructure. In light of this disruptive transformation, the Right-Of-Way (ROW) composition of road space has the potential to be renewed. Design approaches and intelligent control models have been proposed to address this problem, but we lack an operational framework that can dynamically generate ROW plans for AVs and pedestrians in response to real-time demand. Based on microscopic traffic simulation, this study explores Reinforcement Learning (RL) methods for evolving ROW compositions. We implement a centralised paradigm and a distributive learning paradigm to separately perform the dynamic control on several road network configurations. Experimental results indicate that the algorithms have the potential to improve traffic flow efficiency and allocate more space for pedestrians. Furthermore, the distributive learning algorithm outperforms its centralised counterpart regarding computational cost (49.55\%), benchmark rewards (25.35\%), best cumulative rewards (24.58\%), optimal actions (13.49\%) and rate of convergence. This novel road management technique could potentially contribute to the flow-adaptive and active mobility-friendly streets in the AVs era.
* 11 pages, 7 figures, Copyright \c{opyright} 2023, IEEE
A Reinforcement Learning-based Adaptive Control Model for Future Street Planning, An Algorithm and A Case Study
Dec 10, 2021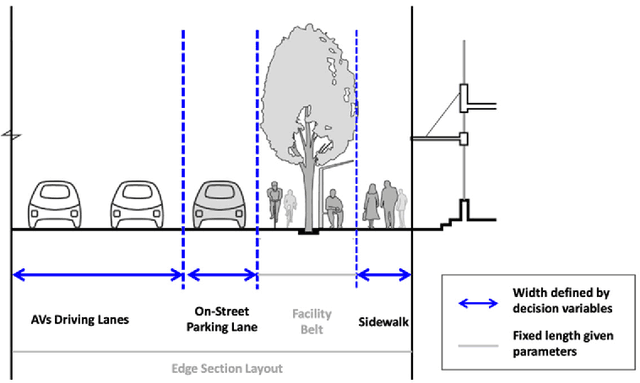

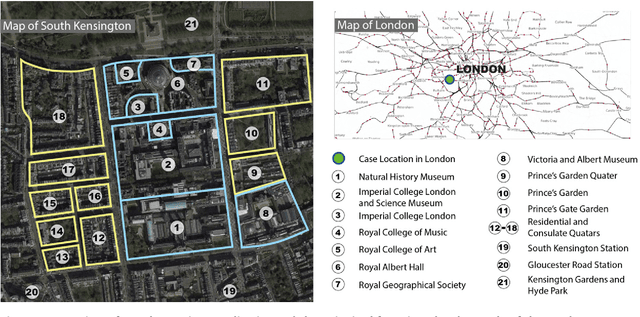
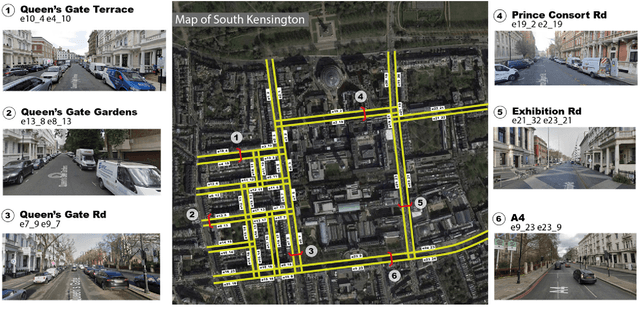
With the emerging technologies in Intelligent Transportation System (ITS), the adaptive operation of road space is likely to be realised within decades. An intelligent street can learn and improve its decision-making on the right-of-way (ROW) for road users, liberating more active pedestrian space while maintaining traffic safety and efficiency. However, there is a lack of effective controlling techniques for these adaptive street infrastructures. To fill this gap in existing studies, we formulate this control problem as a Markov Game and develop a solution based on the multi-agent Deep Deterministic Policy Gradient (MADDPG) algorithm. The proposed model can dynamically assign ROW for sidewalks, autonomous vehicles (AVs) driving lanes and on-street parking areas in real-time. Integrated with the SUMO traffic simulator, this model was evaluated using the road network of the South Kensington District against three cases of divergent traffic conditions: pedestrian flow rates, AVs traffic flow rates and parking demands. Results reveal that our model can achieve an average reduction of 3.87% and 6.26% in street space assigned for on-street parking and vehicular operations. Combined with space gained by limiting the number of driving lanes, the average proportion of sidewalks to total widths of streets can significantly increase by 10.13%.