 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe and Efficient Manoeuvring for Emergency Vehicles in Autonomous Traffic using Multi-Agent Proximal Policy Optimisation
Oct 31, 2022Manoeuvring in the presence of emergency vehicles is still a major issue for vehicle autonomy systems. Most studies that address this topic are based on rule-based methods, which cannot cover all possible scenarios that can take place in autonomous traffic. Multi-Agent Proximal Policy Optimisation (MAPPO) has recently emerged as a powerful method for autonomous systems because it allows for training in thousands of different situations. In this study, we present an approach based on MAPPO to guarantee the safe and efficient manoeuvring of autonomous vehicles in the presence of an emergency vehicle. We introduce a risk metric that summarises the potential risk of collision in a single index. The proposed method generates cooperative policies allowing the emergency vehicle to go at $15 \%$ higher average speed while maintaining high safety distances. Moreover, we explore the trade-off between safety and traffic efficiency and assess the performance in a competitive scenario.
Transferring Multi-Agent Reinforcement Learning Policies for Autonomous Driving using Sim-to-Real
Mar 22, 2022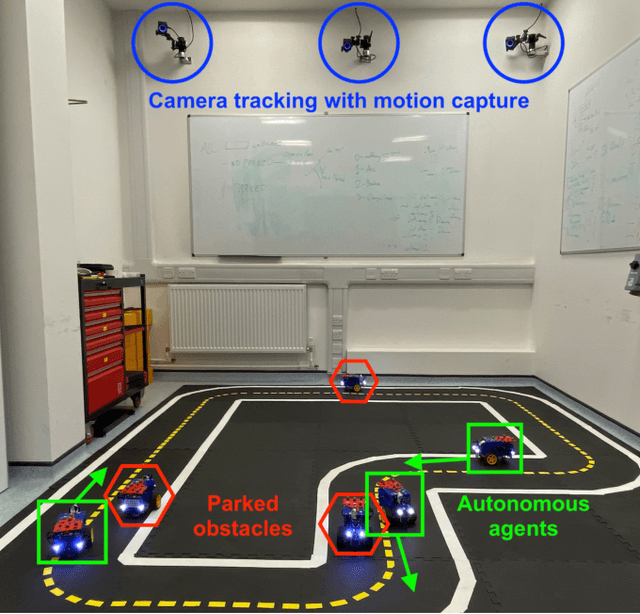
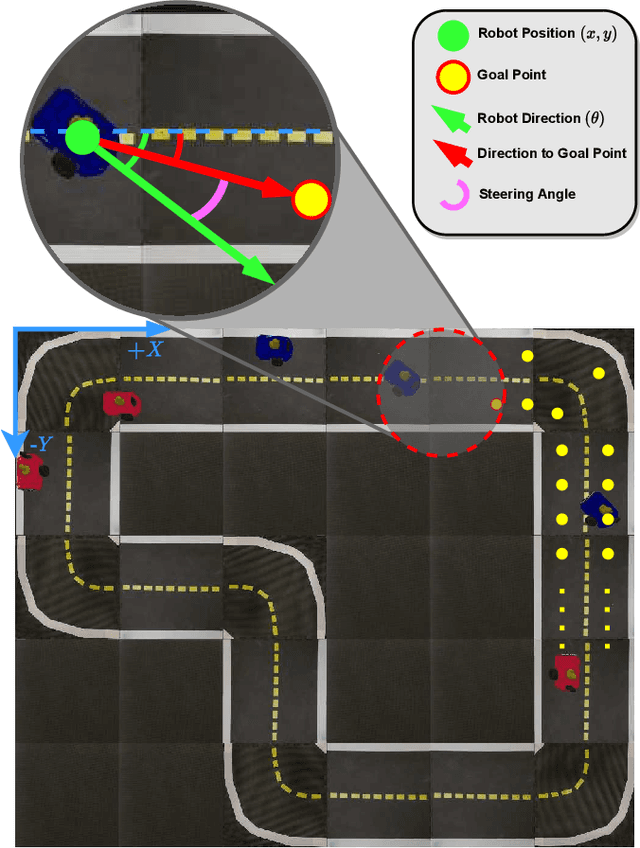
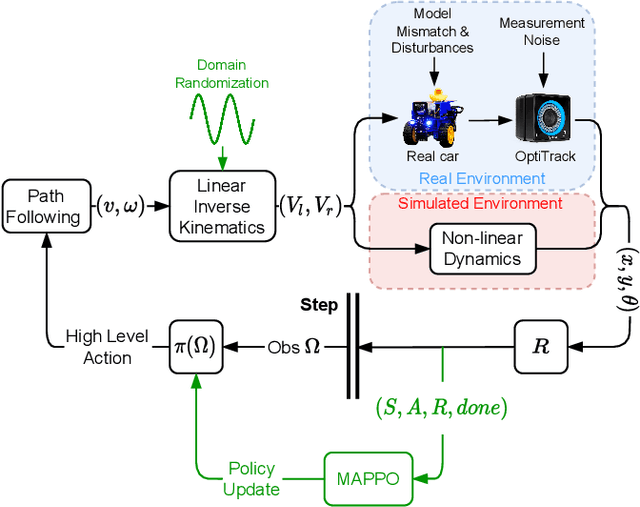
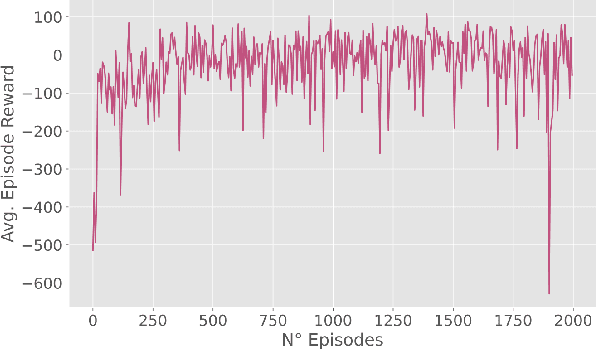
Autonomous Driving requires high levels of coordination and collaboration between agents. Achieving effective coordination in multi-agent systems is a difficult task that remains largely unresolved. Multi-Agent Reinforcement Learning has arisen as a powerful method to accomplish this task because it considers the interaction between agents and also allows for decentralized training -- which makes it highly scalable. However, transferring policies from simulation to the real world is a big challenge, even for single-agent applications. Multi-agent systems add additional complexities to the Sim-to-Real gap due to agent collaboration and environment synchronization. In this paper, we propose a method to transfer multi-agent autonomous driving policies to the real world. For this, we create a multi-agent environment that imitates the dynamics of the Duckietown multi-robot testbed, and train multi-agent policies using the MAPPO algorithm with different levels of domain randomization. We then transfer the trained policies to the Duckietown testbed and compare the use of the MAPPO algorithm against a traditional rule-based method. We show that the rewards of the transferred policies with MAPPO and domain randomization are, on average, 1.85 times superior to the rule-based method. Moreover, we show that different levels of parameter randomization have a substantial impact on the Sim-to-Real gap.
Quantitative Risk Indices for Autonomous Vehicle Training Systems
Apr 27, 2021The development of Autonomous Vehicles (AV) presents an opportunity to save and improve lives. However, achieving SAE Level 5 (full) autonomy will require overcoming many technical challenges. There is a gap in the literature regarding the measurement of safety for self-driving systems. Measuring safety and risk is paramount for the generation of useful simulation scenarios for training and validation of autonomous systems. The limitation of current approaches is the dependence on near-crash data. Although near-miss data can substantially increase scarce available accident data, the definition of a near-miss or near-crash is arbitrary. A promising alternative is the introduction of the Responsibility-Sensitive Safety (RSS) model by Shalev-Shwartz et al., which defines safe lateral and longitudinal distances that can guarantee impossibility of collision under reasonable assumptions for vehicle dynamics. We present a framework that extends the RSS model for cases when reasonable assumptions or safe distances are violated. The proposed framework introduces risk indices that quantify the likelihood of a collision by using vehicle dynamics and driver's risk aversion. The present study concludes with proposed experiments for tuning the parameters of the formulated risk indices.