 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFGS-SLAM: Fourier-based Gaussian Splatting for Real-time SLAM with Sparse and Dense Map Fusion
Mar 03, 2025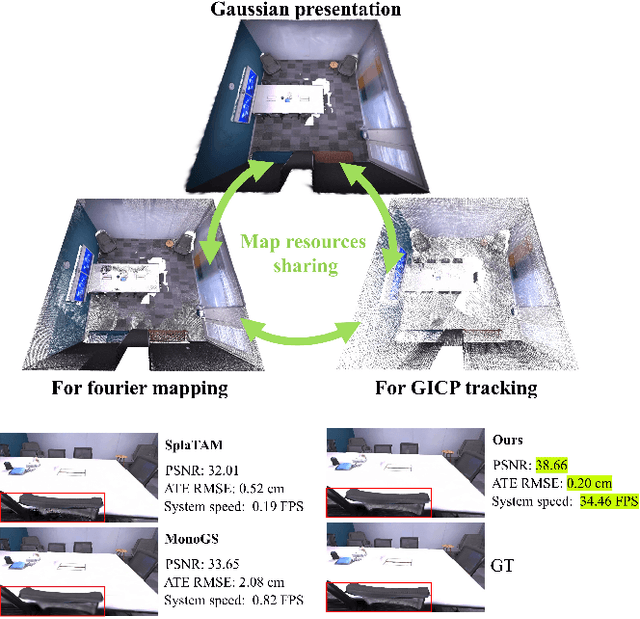
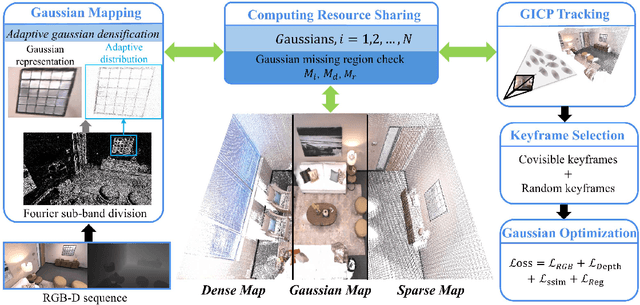
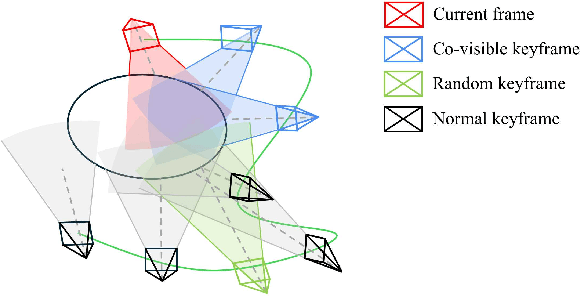
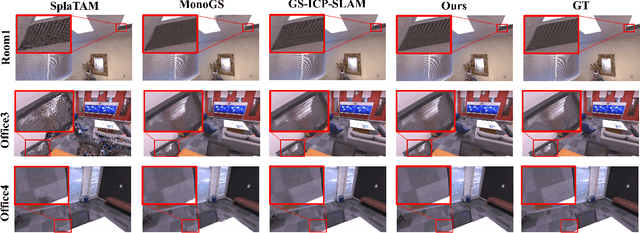
3D gaussian splatting has advanced simultaneous localization and mapping (SLAM) technology by enabling real-time positioning and the construction of high-fidelity maps. However, the uncertainty in gaussian position and initialization parameters introduces challenges, often requiring extensive iterative convergence and resulting in redundant or insufficient gaussian representations. To address this, we introduce a novel adaptive densification method based on Fourier frequency domain analysis to establish gaussian priors for rapid convergence. Additionally, we propose constructing independent and unified sparse and dense maps, where a sparse map supports efficient tracking via Generalized Iterative Closest Point (GICP) and a dense map creates high-fidelity visual representations. This is the first SLAM system leveraging frequency domain analysis to achieve high-quality gaussian mapping in real-time. Experimental results demonstrate an average frame rate of 36 FPS on Replica and TUM RGB-D datasets, achieving competitive accuracy in both localization and mapping.
A Powered Prosthetic Hand with Vision System for Enhancing the Anthropopathic Grasp
Dec 10, 2024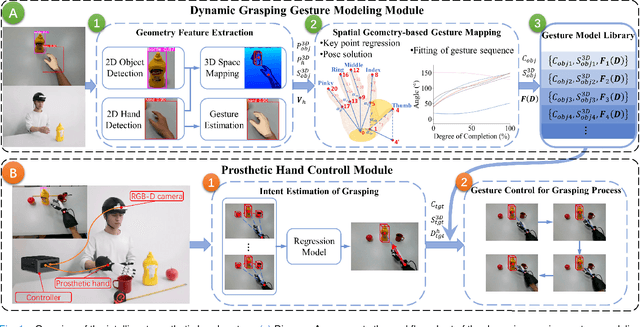
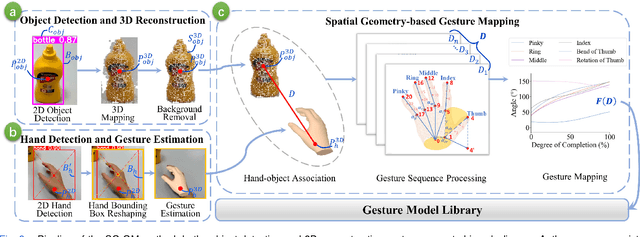
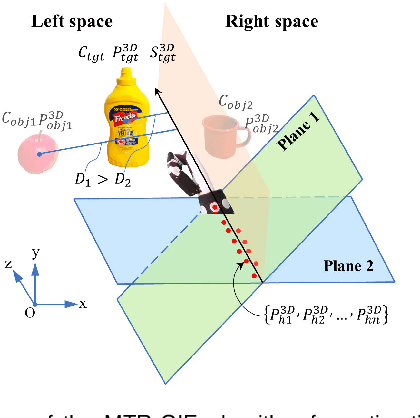
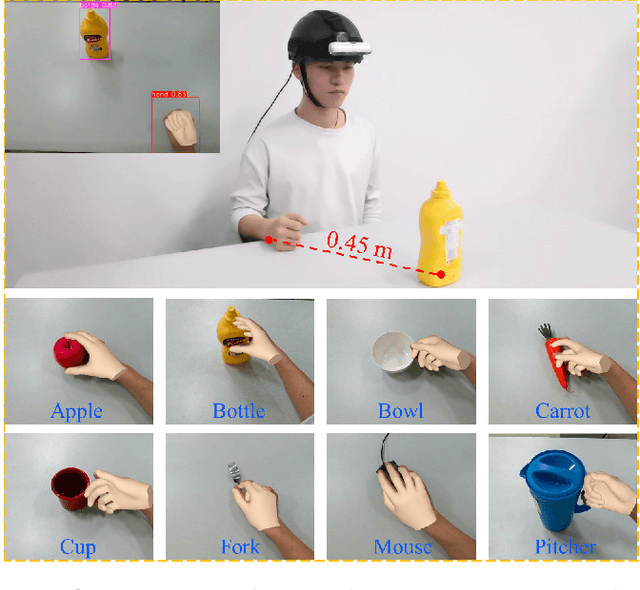
The anthropomorphism of grasping process significantly benefits the experience and grasping efficiency of prosthetic hand wearers. Currently, prosthetic hands controlled by signals such as brain-computer interfaces (BCI) and electromyography (EMG) face difficulties in precisely recognizing the amputees' grasping gestures and executing anthropomorphic grasp processes. Although prosthetic hands equipped with vision systems enables the objects' feature recognition, they lack perception of human grasping intention. Therefore, this paper explores the estimation of grasping gestures solely through visual data to accomplish anthropopathic grasping control and the determination of grasping intention within a multi-object environment. To address this, we propose the Spatial Geometry-based Gesture Mapping (SG-GM) method, which constructs gesture functions based on the geometric features of the human hand grasping processes. It's subsequently implemented on the prosthetic hand. Furthermore, we propose the Motion Trajectory Regression-based Grasping Intent Estimation (MTR-GIE) algorithm. This algorithm predicts pre-grasping object utilizing regression prediction and prior spatial segmentation estimation derived from the prosthetic hand's position and trajectory. The experiments were conducted to grasp 8 common daily objects including cup, fork, etc. The experimental results presented a similarity coefficient $R^{2}$ of grasping process of 0.911, a Root Mean Squared Error ($RMSE$) of 2.47\degree, a success rate of grasping of 95.43$\%$, and an average duration of grasping process of 3.07$\pm$0.41 s. Furthermore, grasping experiments in a multi-object environment were conducted. The average accuracy of intent estimation reached 94.35$\%$. Our methodologies offer a groundbreaking approach to enhance the prosthetic hand's functionality and provides valuable insights for future research.
Fast Hip Joint Moment Estimation with A General Moment Feature Generation Method
Oct 01, 2024The hip joint moment during walking is a crucial basis for hip exoskeleton control. Compared to generating assistive torque profiles based on gait estimation, estimating hip joint moment directly using hip joint angles offers advantages such as simplified sensing and adaptability to variable walking speeds. Existing methods that directly estimate moment from hip joint angles are mainly used for offline biomechanical estimation. However, they suffer from long computation time and lack of personalization, rendering them unsuitable for personalized control of hip exoskeletons. To address these challenges, this paper proposes a fast hip joint moment estimation method based on generalized moment features (GMF). The method first employs a GMF generator to learn a feature representation of joint moment, namely the proposed GMF, which is independent of individual differences. Subsequently, a GRU-based neural network with fast computational performance is trained to learn the mapping from the joint kinematics to the GMF. Finally, the predicted GMF is decoded into the joint moment with a GMF decoder. The joint estimation model is trained and tested on a dataset comprising 20 subjects under 28 walking speed conditions. Results show that the proposed method achieves a root mean square error of 0.1180 $\pm$ 0.0021 Nm/kg for subjects in test dataset, and the computation time per estimation using the employed GRU-based estimator is 1.3420 $\pm$ 0.0031 ms, significantly faster than mainstream neural network architectures, while maintaining comparable network accuracy. These promising results demonstrate that the proposed method enhances the accuracy and computational speed of joint moment estimation neural networks, with potential for guiding exoskeleton control.
Enhancing Prosthetic Safety and Environmental Adaptability: A Visual-Inertial Prosthesis Motion Estimation Approach on Uneven Terrains
Apr 29, 2024



Environment awareness is crucial for enhancing walking safety and stability of amputee wearing powered prosthesis when crossing uneven terrains such as stairs and obstacles. However, existing environmental perception systems for prosthesis only provide terrain types and corresponding parameters, which fails to prevent potential collisions when crossing uneven terrains and may lead to falls and other severe consequences. In this paper, a visual-inertial motion estimation approach is proposed for prosthesis to perceive its movement and the changes of spatial relationship between the prosthesis and uneven terrain when traversing them. To achieve this, we estimate the knee motion by utilizing a depth camera to perceive the environment and align feature points extracted from stairs and obstacles. Subsequently, an error-state Kalman filter is incorporated to fuse the inertial data into visual estimations to reduce the feature extraction error and obtain a more robust estimation. The motion of prosthetic joint and toe are derived using the prosthesis model parameters. Experiment conducted on our collected dataset and stair walking trials with a powered prosthesis shows that the proposed method can accurately tracking the motion of the human leg and prosthesis with an average root-mean-square error of toe trajectory less than 5 cm. The proposed method is expected to enable the environmental adaptive control for prosthesis, thereby enhancing amputee's safety and mobility in uneven terrains.
D3PRefiner: A Diffusion-based Denoise Method for 3D Human Pose Refinement
Jan 08, 2024Three-dimensional (3D) human pose estimation using a monocular camera has gained increasing attention due to its ease of implementation and the abundance of data available from daily life. However, owing to the inherent depth ambiguity in images, the accuracy of existing monocular camera-based 3D pose estimation methods remains unsatisfactory, and the estimated 3D poses usually include much noise. By observing the histogram of this noise, we find each dimension of the noise follows a certain distribution, which indicates the possibility for a neural network to learn the mapping between noisy poses and ground truth poses. In this work, in order to obtain more accurate 3D poses, a Diffusion-based 3D Pose Refiner (D3PRefiner) is proposed to refine the output of any existing 3D pose estimator. We first introduce a conditional multivariate Gaussian distribution to model the distribution of noisy 3D poses, using paired 2D poses and noisy 3D poses as conditions to achieve greater accuracy. Additionally, we leverage the architecture of current diffusion models to convert the distribution of noisy 3D poses into ground truth 3D poses. To evaluate the effectiveness of the proposed method, two state-of-the-art sequence-to-sequence 3D pose estimators are used as basic 3D pose estimation models, and the proposed method is evaluated on different types of 2D poses and different lengths of the input sequence. Experimental results demonstrate the proposed architecture can significantly improve the performance of current sequence-to-sequence 3D pose estimators, with a reduction of at least 10.3% in the mean per joint position error (MPJPE) and at least 11.0% in the Procrustes MPJPE (P-MPJPE).
A Piecewise Monotonic Gait Phase Estimation Model for Controlling a Powered Transfemoral Prosthesis in Various Locomotion Modes
Jul 25, 2022
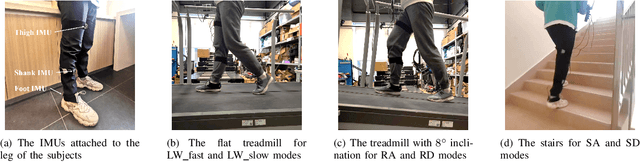
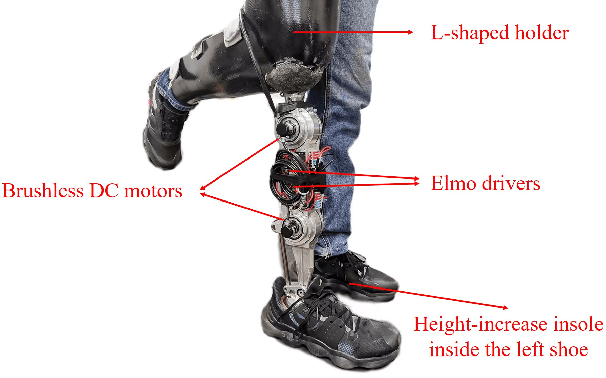
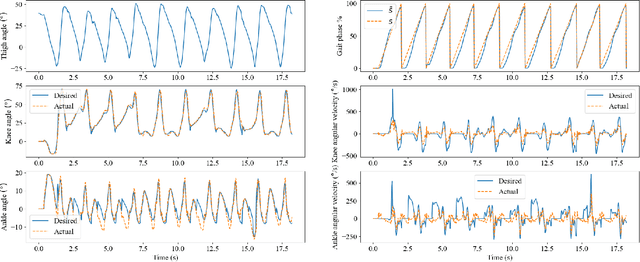
Gait phase-based control is a trending research topic for walking-aid robots, especially robotic lower-limb prostheses. Gait phase estimation is a challenge for gait phase-based control. Previous researches used the integration or the differential of the human's thigh angle to estimate the gait phase, but accumulative measurement errors and noises can affect the estimation results. In this paper, a more robust gait phase estimation method is proposed using a unified form of piecewise monotonic gait phase-thigh angle models for various locomotion modes. The gait phase is estimated from only the thigh angle, which is a stable variable and avoids phase drifting. A Kalman filter-based smoother is designed to further suppress the mutations of the estimated gait phase. Based on the proposed gait phase estimation method, a gait phase-based joint angle tracking controller is designed for a transfemoral prosthesis. The proposed gait estimation method, the gait phase smoother, and the controller are evaluated through offline analysis on walking data in various locomotion modes. And the real-time performance of the gait phase-based controller is validated in an experiment on the transfemoral prosthesis.
Ensemble diverse hypotheses and knowledge distillation for unsupervised cross-subject adaptation
Apr 15, 2022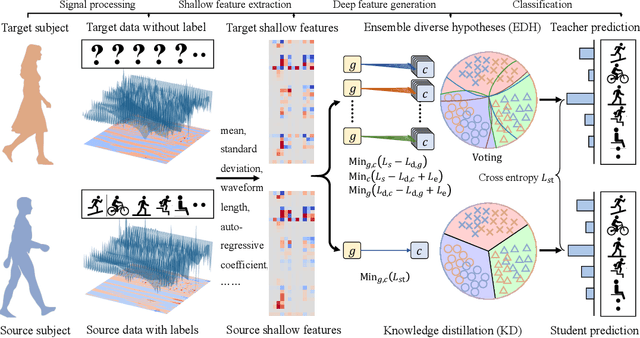
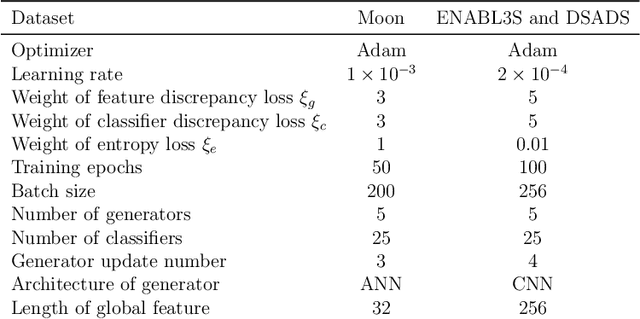
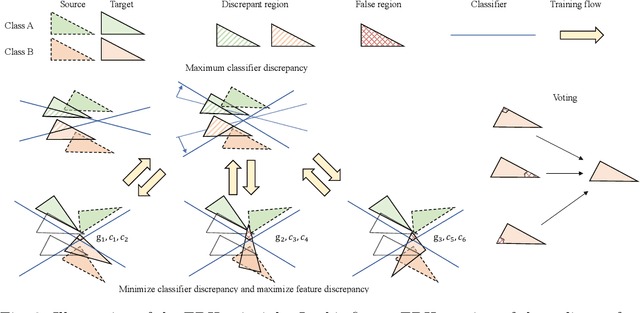
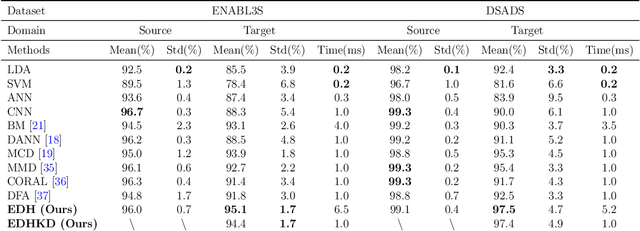
Recognizing human locomotion intent and activities is important for controlling the wearable robots while walking in complex environments. However, human-robot interface signals are usually user-dependent, which causes that the classifier trained on source subjects performs poorly on new subjects. To address this issue, this paper designs the ensemble diverse hypotheses and knowledge distillation (EDHKD) method to realize unsupervised cross-subject adaptation. EDH mitigates the divergence between labeled data of source subjects and unlabeled data of target subjects to accurately classify the locomotion modes of target subjects without labeling data. Compared to previous domain adaptation methods based on the single learner, which may only learn a subset of features from input signals, EDH can learn diverse features by incorporating multiple diverse feature generators and thus increases the accuracy and decreases the variance of classifying target data, but it sacrifices the efficiency. To solve this problem, EDHKD (student) distills the knowledge from the EDH (teacher) to a single network to remain efficient and accurate. The performance of the EDHKD is theoretically proved and experimentally validated on a 2D moon dataset and two public human locomotion datasets. Experimental results show that the EDHKD outperforms all other methods. The EDHKD can classify target data with 96.9%, 94.4%, and 97.4% average accuracy on the above three datasets with a short computing time (1 ms). Compared to a benchmark (BM) method, the EDHKD increases 1.3% and 7.1% average accuracy for classifying the locomotion modes of target subjects. The EDHKD also stabilizes the learning curves. Therefore, the EDHKD is significant for increasing the generalization ability and efficiency of the human intent prediction and human activity recognition system, which will improve human-robot interactions.