 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFGS-SLAM: Fourier-based Gaussian Splatting for Real-time SLAM with Sparse and Dense Map Fusion
Mar 03, 2025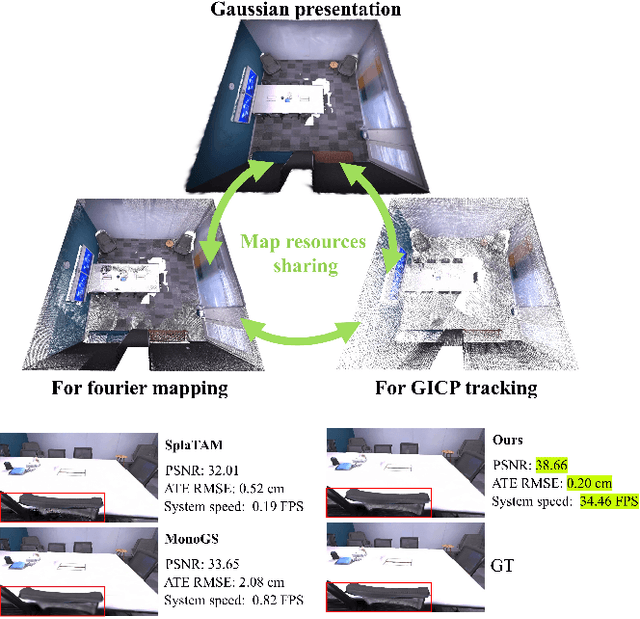
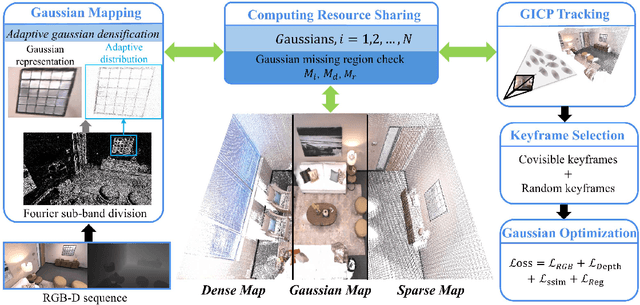
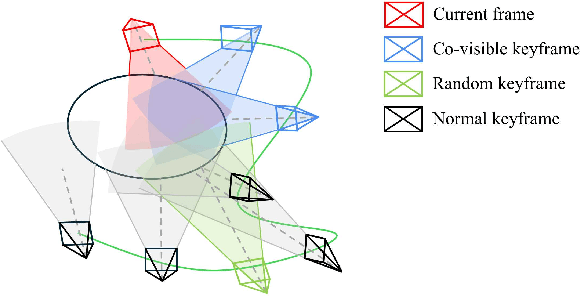
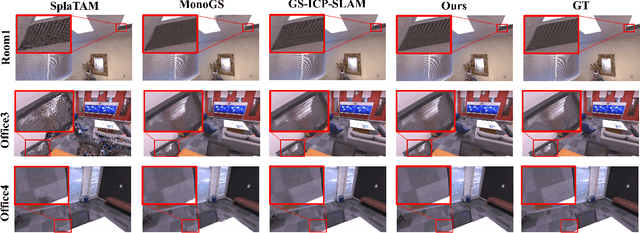
3D gaussian splatting has advanced simultaneous localization and mapping (SLAM) technology by enabling real-time positioning and the construction of high-fidelity maps. However, the uncertainty in gaussian position and initialization parameters introduces challenges, often requiring extensive iterative convergence and resulting in redundant or insufficient gaussian representations. To address this, we introduce a novel adaptive densification method based on Fourier frequency domain analysis to establish gaussian priors for rapid convergence. Additionally, we propose constructing independent and unified sparse and dense maps, where a sparse map supports efficient tracking via Generalized Iterative Closest Point (GICP) and a dense map creates high-fidelity visual representations. This is the first SLAM system leveraging frequency domain analysis to achieve high-quality gaussian mapping in real-time. Experimental results demonstrate an average frame rate of 36 FPS on Replica and TUM RGB-D datasets, achieving competitive accuracy in both localization and mapping.
A Powered Prosthetic Hand with Vision System for Enhancing the Anthropopathic Grasp
Dec 10, 2024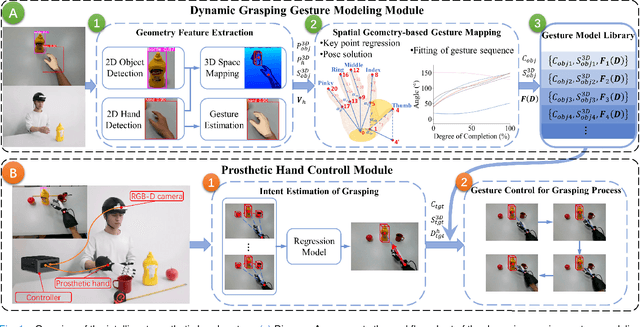
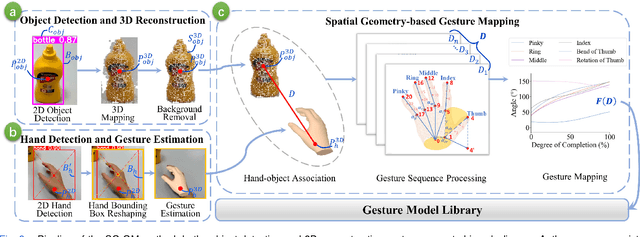
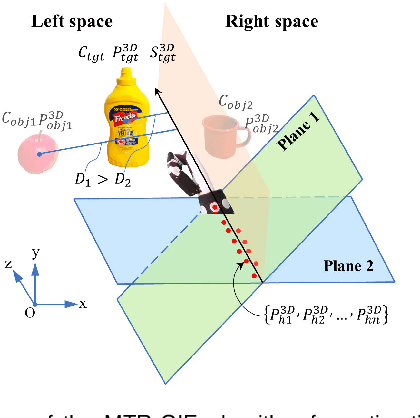
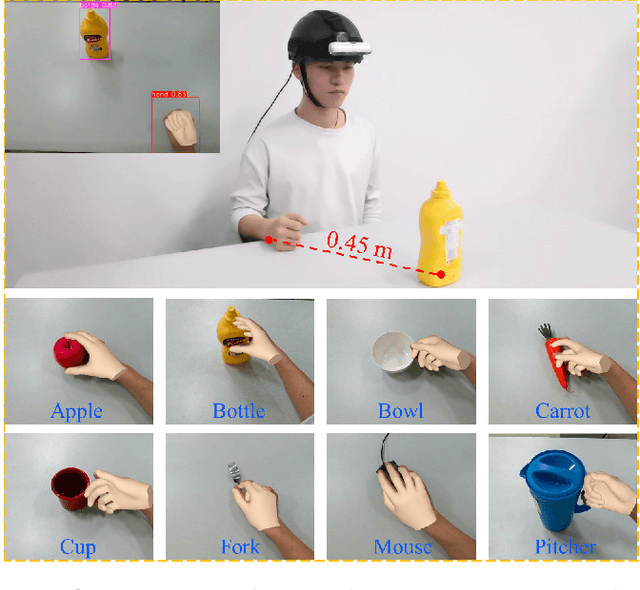
The anthropomorphism of grasping process significantly benefits the experience and grasping efficiency of prosthetic hand wearers. Currently, prosthetic hands controlled by signals such as brain-computer interfaces (BCI) and electromyography (EMG) face difficulties in precisely recognizing the amputees' grasping gestures and executing anthropomorphic grasp processes. Although prosthetic hands equipped with vision systems enables the objects' feature recognition, they lack perception of human grasping intention. Therefore, this paper explores the estimation of grasping gestures solely through visual data to accomplish anthropopathic grasping control and the determination of grasping intention within a multi-object environment. To address this, we propose the Spatial Geometry-based Gesture Mapping (SG-GM) method, which constructs gesture functions based on the geometric features of the human hand grasping processes. It's subsequently implemented on the prosthetic hand. Furthermore, we propose the Motion Trajectory Regression-based Grasping Intent Estimation (MTR-GIE) algorithm. This algorithm predicts pre-grasping object utilizing regression prediction and prior spatial segmentation estimation derived from the prosthetic hand's position and trajectory. The experiments were conducted to grasp 8 common daily objects including cup, fork, etc. The experimental results presented a similarity coefficient $R^{2}$ of grasping process of 0.911, a Root Mean Squared Error ($RMSE$) of 2.47\degree, a success rate of grasping of 95.43$\%$, and an average duration of grasping process of 3.07$\pm$0.41 s. Furthermore, grasping experiments in a multi-object environment were conducted. The average accuracy of intent estimation reached 94.35$\%$. Our methodologies offer a groundbreaking approach to enhance the prosthetic hand's functionality and provides valuable insights for future research.