 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFGS-SLAM: Fourier-based Gaussian Splatting for Real-time SLAM with Sparse and Dense Map Fusion
Mar 03, 2025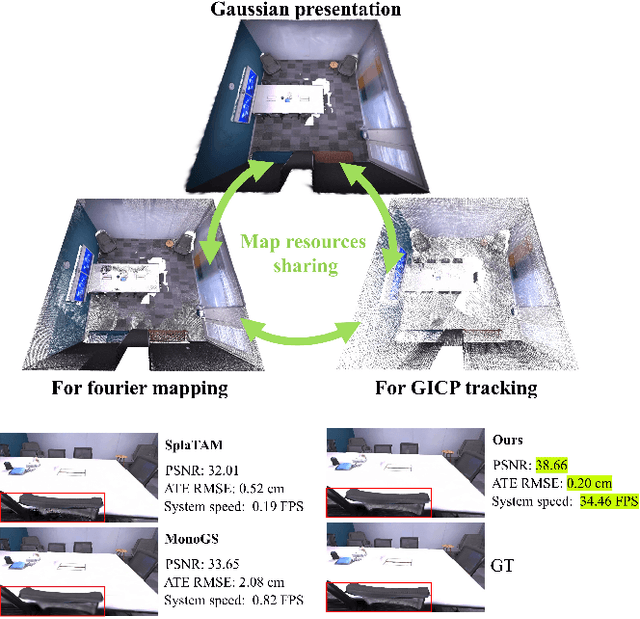
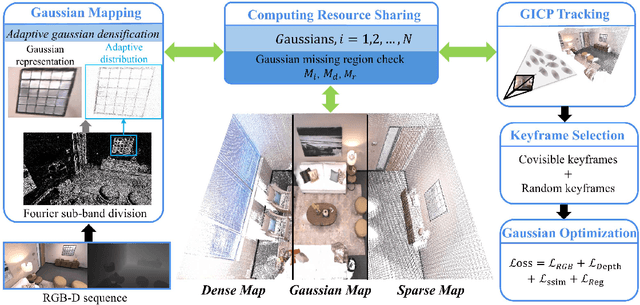
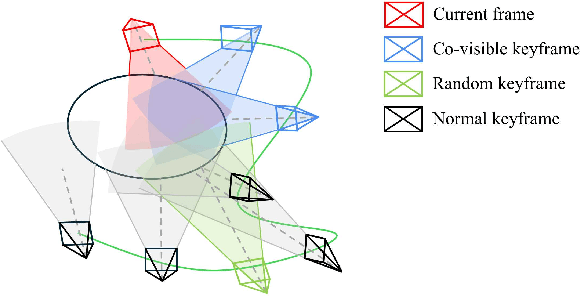
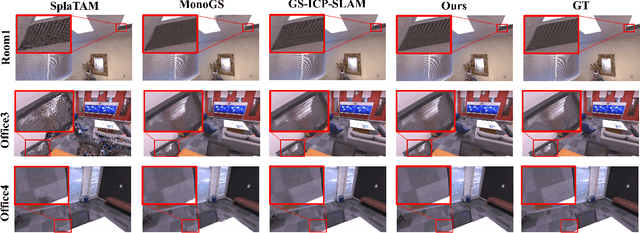
3D gaussian splatting has advanced simultaneous localization and mapping (SLAM) technology by enabling real-time positioning and the construction of high-fidelity maps. However, the uncertainty in gaussian position and initialization parameters introduces challenges, often requiring extensive iterative convergence and resulting in redundant or insufficient gaussian representations. To address this, we introduce a novel adaptive densification method based on Fourier frequency domain analysis to establish gaussian priors for rapid convergence. Additionally, we propose constructing independent and unified sparse and dense maps, where a sparse map supports efficient tracking via Generalized Iterative Closest Point (GICP) and a dense map creates high-fidelity visual representations. This is the first SLAM system leveraging frequency domain analysis to achieve high-quality gaussian mapping in real-time. Experimental results demonstrate an average frame rate of 36 FPS on Replica and TUM RGB-D datasets, achieving competitive accuracy in both localization and mapping.